Материал: 1798
6
тела на другое (например, электровоз тащит вагоны, человек тащит санки, молоток бьет по гвоздю, газ давит на поршень и т.д.).
Эффект действия силы характеризуется тремя элементами: численным значением силы (модулем), направлением силы и точкой приложения силы.
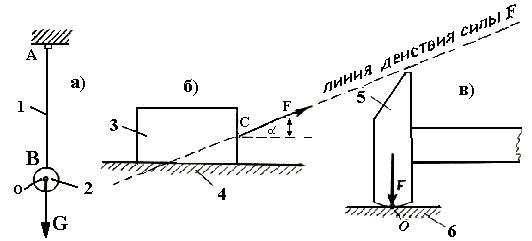
Рис.1.1. Векторное изображение сил
Сила - векторная величина. Вектор силы изображается отрезком, на конце которого ставится стрелка. Длина отрезка выражает численное значение силы. Чем сила больше, тем отрезок длиннее. Направление стрелки указывает направление вектора. Вектор как силу обозначают заглавной буквой латинского алфавита P, F, Q, G и т.д. В тексте вектор выделяют жирным шрифтом P, F, Q, G и т.д.
Линией действия силы (рис. 1.1, б) называют прямую, проведенную как продолжение вектора в обе стороны неограниченно.
Точкой приложения силы называют точку, в которой сила действует на тело (см. рис. 1.1, а – точка О, рис. 1.1, б – точка C, рис. 1.1, в
– точка О).
Модуль, или численное значение силы, в Международной системе СИ измеряется в ньютонах (Н). Кроме этого применяют более крупные единицы: 1 килоньютон – 1 кН, 1 меганьютон – 1 МН.
Наиболее простой пример силы – сила тяжести, которую принято обозначать заглавной буквой G. Это хорошо согласуется с тем, что она порождена ускорением свободного падения, которое обозначается строчной буквой g латинского алфавита.
На рис. 1.1, а изображен шар 2, подвешенный на нити 1. Сила тяжести G приложена в точке О и направлена вертикально вниз. На рис. 1.1, б изображен груз 3, лежащий на плоскости 4. К грузу в точке С приложена сила F, направленная под углом к горизонту и плоскости 4. На рис.1.1, в изображен молоток 5, бьющий по наковальне 6. Сила F приложена к наковальне в точке О и направлена вертикально вниз.
7
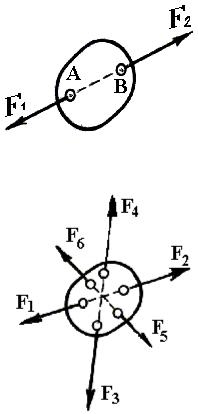
Если несколько сил приложены к телу в разных плоскостях в разные стороны, то такая система сил называется пространственной. Если линии действия сил лежат в одной плоскости, то система называется
плоской.
Если линии действия сил, приложенных к телу, пересекаются в одной точке, то такая система сил называется сходящейся, или системой сходящихся сил. Если линии действия всех сил параллельны друг другу, то такая система называется системой параллельных сил.
Одна сила, эквивалентная всей системе приложенных к телу сил, называется равнодействующей. Эквивалентная - значит, оказывающая одинаковое действие на тело. Силу, равную по величине равнодействующей, но направленную по той же линии действия в обратную сторону, называют уравновешивающей силой.
Если на тело действует система сил, то тело движется в направлении действия равнодействующей. Если к телу приложена система сил и к нему приложить уравновешивающую силу, то система сил будет находиться в равновесии, а тело – в покое.
1.1.4.Аксиомы статики
Аксиомы статики устанавливают основные свойства сил, приложенных к абсолютно твердому телу. Аксиомы – это теоремы, принятые без доказательства, которые основаны на опыте, накопленном человечеством в течение длительного периода времени.
Аксиома 1 (закон инерции Галилея). Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно.
Такое движение называют движением по инерции ( от латинского слова inertia – бездеятельность). Вывести материальную точку из этого состояния могут неуравновешенные силы (или сила), которые нужно приложить к материальной точке. Состояние покоя или движение по инерции называют равновесием. При этом сумма всех сил, действующих на тело, равна нулю. Все мы ощущаем комфортно движение по инерции, когда автобус или троллейбус движется равномерно и прямолинейно. В этом случае сила тяги мотора уравновешивает силы сопротивления движения. На нее не действуют никакие силы, а за окном проплывают пейзажи.
Как только водитель затормозит автобус или троллейбус, уравновешенная сила тяги заменится противоположно направленной силой трения тормозов, состояние покоя нарушится. В случае разгона автобуса или троллейбуса сила тяги мотора превышает силу сопротивления и состояния покоя также не наблюдается.
9
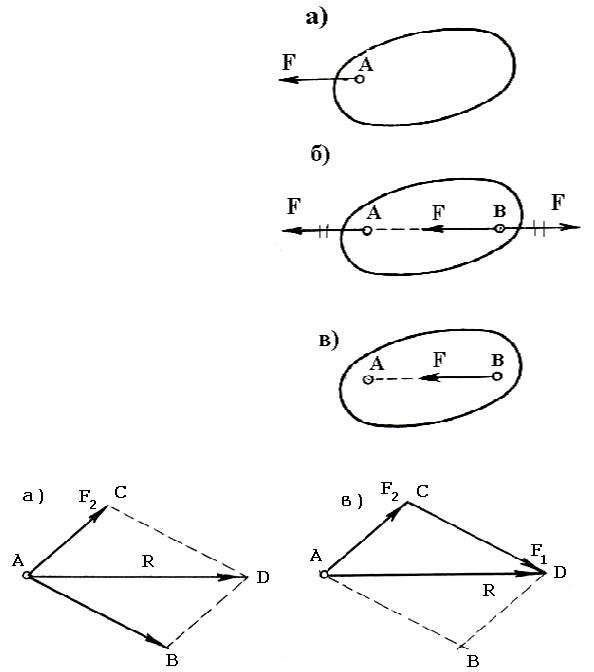
Аксиома 4 (правило параллелограмма). Равнодействующая двух сил, приложенная в одной точке, изображается диагональю параллелограмма, построенного на векторах этих сил.
Эта аксиома является основной для сложения сил. Равнодействующей двух сил F1 и F2 (рис. 1.5, а), приложенных в точке А, будет сила R, которая
является |
|
|
диагональю |
параллелограмма |
ABDC, |
||
построенного на векторах сил F1 |
|||
и |
F2. |
|
Определение |
равнодействующей двух сил по |
|||
правилу |
|
параллелограмма |
|
называется |
векторным или |
||
геометрическим |
сложением и |
||
выражается |
|
векторным |
|
уравнением |
|
Рис. 1.4 |
|
Рис.1.5
F1 + F2 = R . |
(1.1) |
При графическом определении равнодействующей двух сил можно пользоваться правилом треугольника, которое вытекает из правила параллелограмма. К концу вектора F2, приложенному в точке А (рис. 1.5, б), пристраиваем вектор F1 в точке C, т.е. переносим вектор F1 из положения AB в положение CD. От этого параллелограмм не изменится и его диагональ останется на месте. Равнодействующая R также будет диагональю параллелограмма, но одновременно она будет стороной
10
треугольника ACD. На основании аксиомы 4 одну силу R можно заменить двумя силами F1 и F2. Такая замена называется разложением силы на две составляющие и часто используется при решении задач механики.
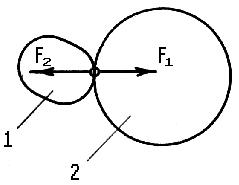
Аксиома 5 (закон действия и противодействия). Силы взаимодействия двух твердых тел друг на друга равны по модулю и направлены в противоположные стороны. Эта аксиома фундаментальная. Она объясняет происхождение механических сил вообще. Силы возникают при взаимодействии твердых тел друг на друга.
Тело 1 (рис. 1.6) действует на тело 2 силой F1, а тело 2 действует на тело 1 силой F2. При этом F1 = F2. Обе силы действуют по одной прямой и направлены в противоположные стороны. Действие (сила F1) и противодействие (сила F2) всегда приложены к различным телам (телу 2 и телу 1).
Рис.1.6
1.2. Связи и их реакции
Свободными телами называют тела, которые не соприкасаются с другими телами и могут свободно двигаться в пространстве в любом направлении. Примерами могут служить снаряд, выпущенный из пушки, планер, запущенный в небо, гладкое тело, скользящее по плоскости, и т.д.
Несвободные тела соприкасаются с другими телами и могут двигаться только в свободном направлении. Например, вагонетка, которая свободно передвигается по рельсам, но только вдоль рельсового пути, а поперек пути ее не пускают реборды на колесах; маятник, который свободно качается на оси; поршень насоса и т.д.
Твердые или гибкие тела, ограничивающие свободу движения несвободного тела, называют связями.
Свободное тело в пространстве обладает шестью степенями свободы (рис. 1.7): x– вдоль оси X; y– вдоль оси Y; z– вдоль оси Z; – вокруг оси X; – вокруг оси Y; – вокруг оси Z.
Если тело ограничено движением в одной плоскости (рис. 1.8), то оно обладает тремя степенями свободы: x, y и z. Если свободному телу на плоскости поставить преграду на пути X, т.е. поставить связь по оси X, то останется только две степени свободы, если поставить две связи, то останется одна степень свободы, если три связи, то тело становится неподвижным и будет находиться в покое.