Материал: 1798
16
1.3.3. Разложение сил на две составляющие
Рис.1.15
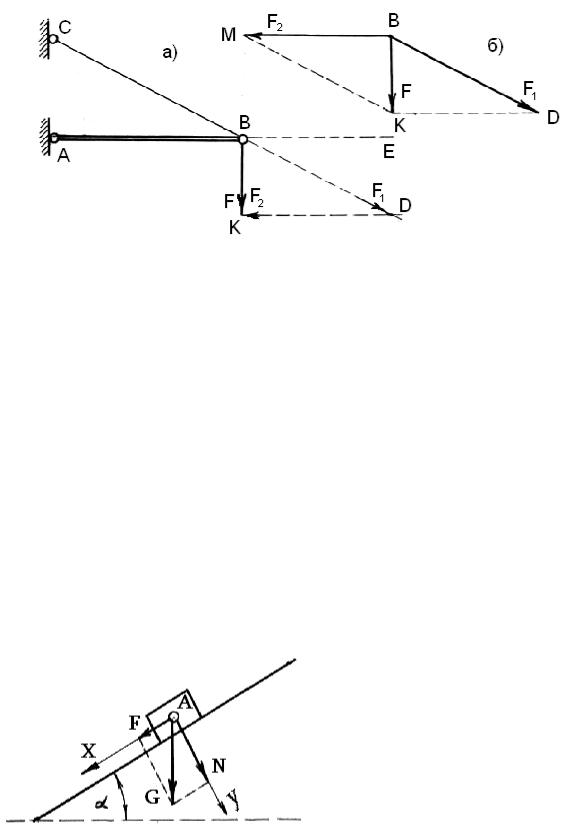
Зачастую при решении задач требуется одну силу F разложить на две составляющие. Например, требуется определить силу, которая растягивает нить BC (рис. 1.15, а), и силу, которая действует на стержень AB. Между стержнем и стеной установлен шарнир А. Стержень может воспринимать только силу, которая направлена вдоль его оси AB. Он может либо растягиваться, либо сжиматься. Итак, сила растягивающая нить, направлена вдоль BC в сторону BD, а сила действующая на стержень направлена вдоль AB. Задача сводится к тому, чтобы разложить силу F на две составляющие, параллельные AB и BC. Для этого из точки B (рис. 1.15, б) проводим вектор F. Из концов вектора F точек B и K проводим прямые BM, KD, BD и KM, которые параллельны AB и BC. В результате получим параллелограмм BDKM с диагональю BK. Из аксиомы 4 известно, что диагональю параллелограмма изображается равнодействующая сил, которые изображают стороны параллелограмма, т.е.
F = F1 + F2 . |
(1.8) |
Силы F1 и F2 приложены в точке B. Сила F1 растягивает нить BC, сила F2 сжимает стержень AB.
Применяя метод треугольника, из точки В (рис. 1.15, а) проводим продолжение линии CB, а из точки K проводим линию KD║ AB до пересечения с продолжением линии CB в точке D. Отрезок BD соответствует силе F1, отрезок KD соответствует силе F2.
Рис.1.16
17
Направление сил показано стрелками. При этом необходимо, чтобы равнодействующая F всегда была направлена от начала первого вектора F1 к концу второго вектора F2 .
Разложение силы веса тела, лежащего на наклонной плоскости (рис. 1.16), на направление осей X и Y производится аналогичным образом.
Силы F и N построены на сторонах прямоугольника, диагональю которого является сила веса G.
1.3.4. Аналитический метод сложения сил
Рис. 1.17
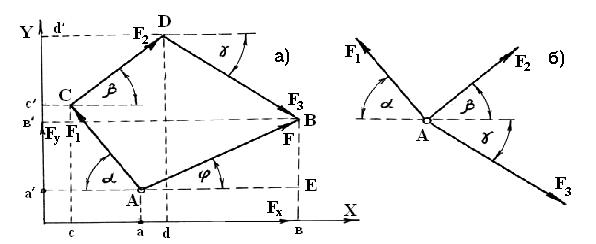
Пусть дана система сходящихся сил F1; F2 и F3 (рис. 1.17, б), которые приложены к точке A. Требуется определить величину и направление равнодействующей аналитическим методом. Произведем вначале графическое сложение сил методом силового многоугольника. Из точки A (рис. 1.17, а) откладываем последовательно векторы F1; F2 и F3 методом их параллельного переноса с рис. 1.17, б. Получим разомкнутый многоугольник ACDB. Равнодействующая F является замыкающим отрезком AB этого многоугольника. Спроектируем все силы на ось X, которые будут изображаться отрезками:
F1x = ас; F2x = сd; F3x = db . |
(1.9) |
Сумму проекций можно представить в следующем виде:
n
Fix = F1x + F2x + F3x = -ac + cd + db = ab = Fx .
i 1
По аналогии для оси Y можно записать
n
Fiy = F1y + F2y + F3y = a′c′ + c′d′ – d′b′ = a′b′ = Fy .
i 1

18
Для упрощения обозначений в дальнейшем будем суммы проекций обозначать
n |
n |
|
Fix X |
и Fy Y . |
(1.10) |
i 1 |
i 1 |
|
Проекция векторной суммы на ось координат равна алгебраической сумме проекций слагаемых векторов на ту же ось и равна проекции равнодействующего вектора.
Итак, проекция равнодействующего вектора равна алгебраической сумме проекций всех сил, т.е.
Fx X ; |
Fy Y . |
(1.11) |
Модуль равнодействующей силы F через ее проекции (см. уравнение (1.7)) определяется по формуле
F |
F2 |
F2 . |
|
|
x |
y |
(1.12) |
|
|
|
|
Направление равнодействующего вектора, т.е. угол , определим, |
|||
пользуясь формулой (1.3): |
|
|
(1.13) |
cos =Fx/F ; |
sin =Fy/F . |
||
Если при сложении сходящихся сил равнодействующая будет равна нулю, то тело, к которому приложены силы, находится в покое. Это возможно, если
Fx X 0 ; |
Fy Y 0 ; |
F |
Fx2 Fy2 |
0 . |
(1.14) |
Таким образом, необходимым и достаточным условием равновесия плоской системы сходящихся сил является равенство нулю алгебраической суммы проекции всех сил на каждую координационную ось:
X 0 ; |
Y 0 . |
(1.15) |
Формулы (1.15) называют уравнениями равновесия плоской системы сходящихся сил и используют при аналитическом решении задач.
1.3.5. Примеры решения задач
Аналитический метод решения задач является универсальным и применяется чаще всего. Решение задач на равновесие плоской системы имеет следующую последовательность:
19
1.Выделяют тело или точку, где пересекаются линии действия сил, к этой точке прикладывают заданные силы.
2.Освобождают тело или точку от связей (принцип освобождаемости от связей) и заменяют их действие реакциями.
3.Выбирают координатные оси X и Y и относительно них составляют два уравнения равновесия (см. формулы (1.14)). Число неизвестных не должно быть более двух.
4.Решают систему уравнений (1.14) с двумя (или одним) неизвестными.
Линия действия реакций определяется сравнительно просто (см. §1.2). Нить имеет только одно направление. Опора (стена, пол, угол, другое тело и т.д.) тоже по закону противодействия имеет одно направление, а вот стержень, закрепленный по концам шарнирами, линию действия реакции имеет вдоль оси, но при этом он может как растягиваться, так и сжиматься. В этом случае направление реакции можно выбирать в ту или другую сторону. При определении модуля данной реакции может получиться знак плюс или минус. Если знак плюс, то направление реакции на схеме выбрано правильно. Если знак минус, то направление реакции нужно изменить на обратное и внести исправления в расчет и в схему.
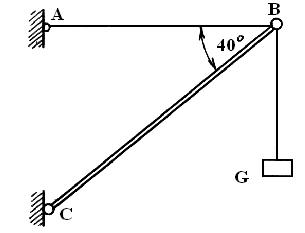
Пример. Груз G = 5 кН подвешен на канате в точке B. Определить усилия в растяжке AB и стержне BC (рис. 1.18).
Ре ш е н и е
1.В точке B пересекутся линии действия заданной силы G
иискомых реакций в растяжке AB
истержне BC. Точку B выделяем как материальную точку, к которой приложены все силы.
Рис.1.18
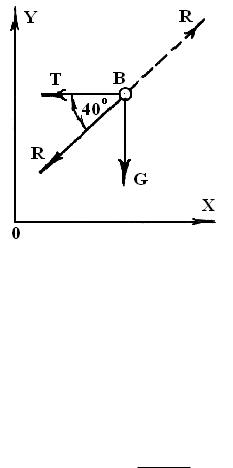
2.Освобождаем точку B от связей: растяжки AB и стержня BC и заменяем их реакциями T и R соответственно. Направление реакции R выбрано произвольно (рис. 1.19).
3.Выбираем координатные оси X и Y и составляем уравнение равновесия.
X T R cos 40 = 0 ;
20
Y G R sin 40 = 0.
Число неизвестных в двух уравнениях равно двум, поэтому уравнения эти решаются, а система является статически определимой.
4.Решаем систему уравнений. Из второго уравнения
R = - G/sin 40°= - 5/0.643 = -7.78 кН .
Подставив значение R в первое уравнение, получим
T = - R· cos 40° = 7,78· 0,766 = 5,96 кН .
Рис.1.19
Реакция R получилась с отрицательным знаком, поэтому нужно направление силы R исправить на обратное (пунктирное изображение). После этого уравнение перепишется в виде
X T R cos 40 = 0 ;
Y G R sin 40 .
и тогда
G |
|
T Rcos400 |
5,96кН . |
R sin400 |
7,78 кН ; |
Задачи на эту тему приводятся в задачнике [8, §2, с. 10 – 23].
1.4.Пара сил. Момент силы. Равновесие плоской системы сил
Две равные по величине параллельные силы, приложенные к телу и направленные в противоположные стороны, называются парой сил. Плоскость, в которой расположена пара, называют плоскостью действия пары сил. Сумма проекций пары сил на оси X и Y равна нулю:
X 0 ; Y 0 . (1.16)
Из этого можно сделать вывод: под действием пары сил тело не движется ни вдоль оси X, ни вдоль оси Y.
Пара сил характеризуется моментом, который вращает тело в плоскости XOY, то есть относительно оси Z, перпендикулярной плоскости
XOY. Момент пары сил относительно оси Z равен произведению |
|
Mz F a, |
(1.17) |
где F - одна из сил пары; а - плечо пары сил. |
|