Материал: 1798
11
Рис.1.7 |
Рис 1.8 |
При взаимодействии между телом и связями возникают силы противодействия согласно аксиоме 4, которые препятствуют возможности движения тела. Тело действует на связи, т.е. преграды, а связи действуют на тело. Сила действия связи, т.е. преграды на тело, называется реакцией связи.
Связь ограничивает движение тела, поэтому реакция связи всегда направлена в сторону, противоположную тому движению, которому она препятствует.
На рис. 1.9 нить 1 препятствует движению тела 2 и реакция связи R направлена противоположно движению. Тело 4 упирается в преграду (связь) 5, поэтому реакция R препятствует движению.
Определение реакций связей является одной из наиболее важных задач статики.
Рис. 1.9
В статике изучают несвободные неподвижные тела. Рассмотрим реакции различных связей.
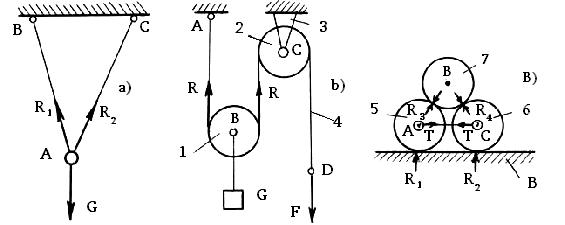
Гибкие связи (рис. 1.10, а), осуществляемые нитями, канатами или тросами, удерживают тело А, не давая ему двигаться вниз под действием веса G. Реакции R гибких связей направлены вдоль нитей в
12
противоположную сторону, т.е. вверх. Нужно помнить, что гибкая связь может сопротивляться только растяжению (толкать нить не может, только тянуть).
Рис.1.10
На рис. 1.10, б изображено подъемное устройство. Блок 1 подвижный, к его оси подвешен груз G. Блок 2 неподвижный, его ось закреплена в кронштейне 3. Через блоки 1 и 2 переброшен канат 4, один конец которого закреплен в точке А, а за другой свободный конец в точке D его тянут вниз. При этом канат вращает блоки 1 и 2, блок 1 поднимается вверх, поднимая груз G. Трением каната о блоки пренебрегаем. Поскольку канатединое целое, то как любая нить он может иметь одну единственную растягивающую силу.
F = R , |
(1.2) |
где F – внешняя сила, приложенная к канату, а R – реакция нити. Если рассмотреть блок 1, то он вместе с грузом G удерживается двумя канатами (как в предыдущем примере). Реакция R гибких связей направлена вверх.
Три катка 5, 6 и 7 сложены штабелем на гладкой плоскости 8. Нижние катки 5 и 6, чтобы они не раскатились под весом верхнего катка 7, стянуты тросом AC. Вес трех катков воздействует на плоскость 8, которая согласно аксиоме 4 создает противодействие, т.е. реакции в точках касания катков 5 и 6.
Силы реакции в точках касания двух тел всегда направлены по нормали в точке касания. Нормалью к плоскости является перпендикуляр, восстановленный из точки касания. Нормалью к кривой является перпендикуляр, восстановленный из точки касания к касательной этой кривой.
На основании этого правила реакции R1 и R2 перпендикулярны к плоскости 8. Линии действия реакций R3 и R4 в точке касания катка 7 с катками 5 и 6 направлены по нормали и проходят через центры этих
13
катков. Реакции T троса AC направлены вдоль него и удерживают катки 5 и 6.
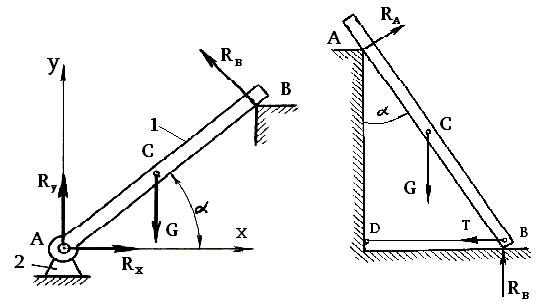
Рама 1 установлена шарнирно (рис.1.11) на кронштейне 2 и может поворачиваться вокруг оси А. Свободным концом рама опирается на опору в точке В. Вес рамы G приложен в ее центре тяжести C. Шарнир А у тела (рамы 1) отнимает две степени свободы X и Y, следовательно, в шарнире возникают две реакции Rx и Ry. В опоре B возникает реакция RB, которая направлена по нормали к поверхности, то есть перпендикулярно к плоскости рамы.
Балка, поставленная наклонно (рис. 1.12), нижним концом опирается на гладкий пол в точке B, а верхним - на стенку в точке A. В точке B балка нитью BD привязана к стенке в точке D. Вес балки G приложен в центре тяжести C. В точке А угол стены создает реакцию RA, которая перпендикулярна к балке. В точке B гладкий пол создает реакцию RB, перпендикулярную к полу. Нить BD создает реакцию T, которая удерживает балку от сползания по гладкому полу вправо.
Рис.1.11 |
Рис.1.12 |
Существование реакций обосновывается аксиомой 4 о действии и противодействии.
1.3. Плоская система сходящихся сил
1.3.1. Графический метод сложения сил
Система сил, линии действия которых пересекаются в одной точке, называют системой сходящихся сил. Другими словами – это система сил, приложенных к телу в одной точке.
14
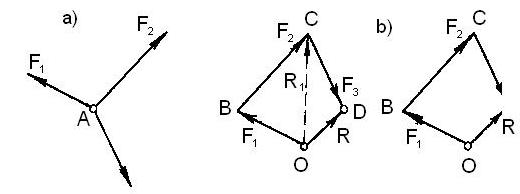
Рис.1.13
Пусть дана система сил, приложенных к точке А (рис. 1.13, а). Для определения равнодействующей сил F1, F2, и F3 сложим последовательно попарно силы, используя правило треугольника. Сложим сначала силы F1 и F2 (рис. 1.13, б). Из произвольной точки О проведем вектор F1. Из конца вектора F1 (точка B) проведем вектор F2. Соединив точку О с концом вектора F2 ( точкой C), получим их равнодействующую R1, теперь сложим силу R1 с силой F3. Для этого из конца вектора R1 (точка C) проведем вектор F3, соединив точку О с концом вектора F3 (точка D), получим силу R, которая и есть равнодействующая заданных сил F1, F2 и F3.
Промежуточный вектор R1 можно не строить, а последовательно (рис. 1.13, в) в указанном выше порядке один вектор за другим откладывать все заданные силы, а начало первого вектора соединить с концом последнего. Это и будет равнодействующий вектор. Фигура OBCD называется силовым многоугольником. Замыкающая сторона силового многоугольника является равнодействующей системы сил. Равнодействующая R всегда направлена от начала первого вектора к концу последнего вектора. Другими словами, стрелка равнодействующей всегда направлена навстречу последовательного потока слагаемых векторов. Если при сложении сил вектор последней силы совместится с началом первой силы, то равнодействующая системы сходящихся сил будет равна нулю. В этом случае система сходящихся сил будет находиться в равновесии. Это и будет являться геометрическим условием равновесия системы сходящихся сил.
1.3.2. Проекция силы на оси координат
Многие задачи статики решают аналитическим методом, при котором используют не сами силы, а их проекции на оси координат.
Проекцией вектора на ось называется отрезок оси между основаниями перпендикуляров, опущенных из начала и конца вектора на ось.
15
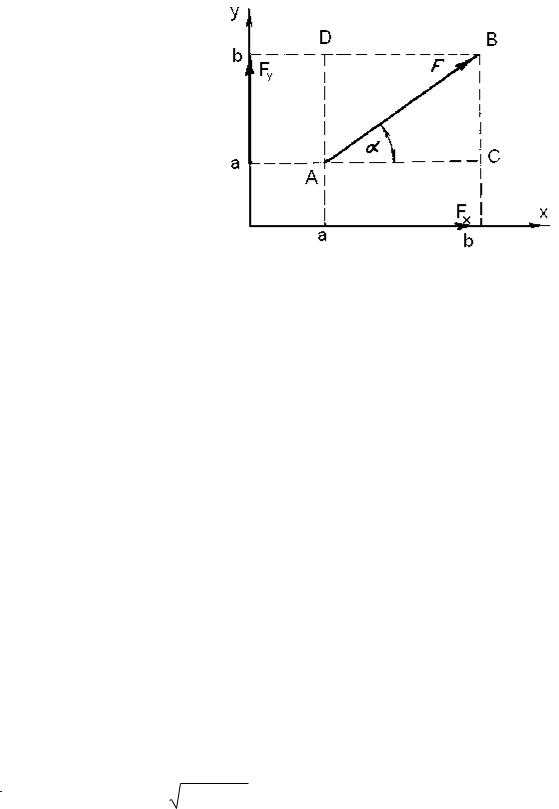
Например, проекцией вектора силы F на ось X будет отрезок ab оси X, где a и b есть основания перпендикуляров, опущенных из начала А и конца В вектора F. Проекцией силы F на ось Y будет отрезок а b оси Y.
Проекция вектора положительна, если она совпадает с направлением оси и, наоборот, отрицательна,
Рис.1.14
если направлена в сторону, противоположную оси. В приведенном примере на рис.1.14 обе проекции - положительны.
Чтобы найти величину проекции вектора силы F на ось X, опускаем перпендикуляры Aa и Bb (рис. 1.14) на эту ось. Длина проекции вектора определится из треугольника ABC:
Fx = ab = AC = F· cos . |
(1.3) |
Аналогично определяем величину проекции вектора силы F на ось Y:
Fy = а'b' = BC = F · sin . |
(1.4) |
Если сила F перпендикулярна оси X, то
Fx = F· cos900 |
= 0 ; |
(1.5) |
Fy = F · sin900 |
= F . |
Если сила F перпендикулярна оси Y, то
Fx = F · cos00 |
= F ; |
(1.6) |
Fy = F · sin00 |
= 0 . |
|
Если известна величина проекций силы F на оси X и Y, то применяя теорему Пифагора к треугольнику ABC, стороны которого равны векторам F, Fx и Fy, можно записать
F |
Fx2 Fy2, |
(1.7) |
где F – модуль (численное значение) вектора F; Fx – модуль вектора Fx; Fy – модуль вектора Fy.