Материал: 1798
176 |
|
|
|
|
||
|
|
|
|
|
|
|
mm |
2M1 |
k |
|
|||
|
|
, |
(16.62) |
|||
|
|
|||||
|
|
y z1 m [ u] |
|
|||
где mm – модуль в среднем сечении зуба, мм; М1 – крутящий момент на шестерне, Н·мм; k = 1,5 – коэффициент нагрузки; у – коэффициент формы зуба (см. табл. 16.1); z1 – число зубьев шестерни; m = 6…8 – коэффициент ширины зуба; [ u] – допускаемое напряжение на изгиб, МПа, определяется по формуле (16.33) или (16.34).
Внешний окружной модуль m определяют по формуле (16.53) и округляют в большую сторону до стандартного значения. Затем уточняют средний модуль по формуле (16.52).
Для проверочного расчета на контактную прочность применяют уточненное уравнение (16.42). При определении контактного напряжениян в конической передаче переходят к зацеплению эквивалентных зубчатых колес. После преобразования для прямозубого конического колеса получают
|
|
|
F |
|
|
u |
2 |
1 |
|
|
|
|
C |
H |
|
t |
|
12 |
|
[C |
H |
], |
(16.63) |
||
|
|
|
||||||||||
|
|
b d |
m1 |
|
u |
|
|
|
|
|||
|
|
|
|
|
12 |
|
|
|
|
|
||
где СН – коэффициент контактных напряжений, МПа; Ft – окружная сила, Н; b = m mm – ширина зубчатого венца, мм; dm1 = mm z1 – начальный диаметр в среднем сечении зуба, мм; u12 – передаточное отношение; [СН] – допускаемый коэффициент контактных напряжений, МПа, определяется по формуле (16.43) или (16.45).
Для проектного расчета на контактную прочность конических прямозубых колес применяют уточненную формулу (16.46). Модуль конической передачи в среднем сечении зуба определяют по формуле
m |
m |
3 |
|
2M1 k |
|
|
u12 1 |
. |
(16.64) |
|||
[C |
|
2 |
|
|||||||||
|
|
H |
] |
m |
z |
|
u12 |
|
||||
|
|
|
|
|
1 |
|
|
|
|
|||
17. ПРОЧИЕ ПЕРЕДАЧИ
17.1. Винтовые механизмы
Винтовые механизмы широко используются в машинах и механизмах для передачи движения поступательно движущемуся рабочему органу. Передачи в машинах имеют вращательное движение. Это быстроходные электродвигатели и двигатели внутреннего сгорания, редукторы, понижающие частоту вращения двигателей, и др. Чтобы вращательное движение преобразовать в поступательное движение рабочего органа, применяют передачу «винт – гайка». Передача «винт –
177
гайка» используется в винтовых домкратах, прессах, станках, приборах и других машинах.
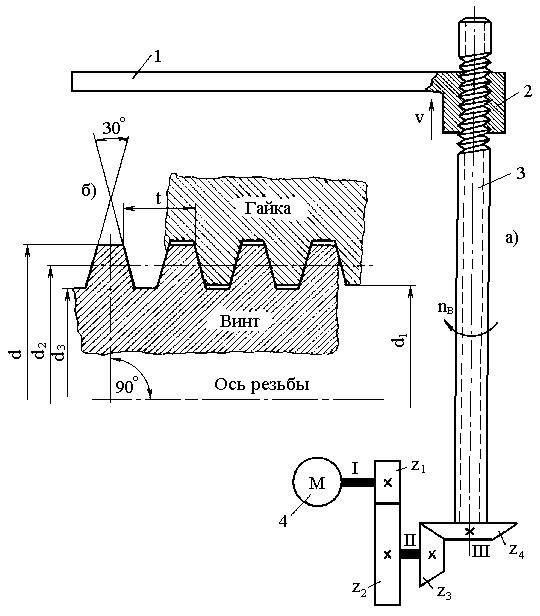
На рис.17.1,а приведена схема винтового погрузчика, или штабелёра. Рабочим органом является платформа 1, на которую укладывается груз или контейнер. Заодно с платформой выполнена гайка 2, в которую ввинчен винт 3. Винт получает вращение от конического колеса z4, которое, в свою очередь, получает вращение от электродвигателя 4 через передачу z1…z4.
Рис.17.1
Платформа 1 с гайкой 2 могут двигаться только вертикально по специальным направляющим. Когда винт 3 вращается, гайка с платформой вынуждены двигаться вверх или вниз в зависимости от направления вращения винта. Чтобы не было самопроизвольного опускания платформы с грузом, винтовая пара должна быть самотормозящей.
178
Достоинства винтовой передачи: простое получение медленного плавного поступательного движения, выигрыш в силе, большая грузоподъемность, простота конструкции и точность перемещения.
Недостаток – большие потери на трение в винтовой передаче и, как следствие, низкий КПД.
В механизмах, которые передают усилие, например в грузовых и ходовых винтах, применяют трапецеидальную резьбу (рис.17.1,б). Угол профиля резьбы α = 300. Основными параметрами резьбы являются наружный диаметр винта d и шаг резьбы t.
Грузовые винты предназначены для подъема грузов или передачи усилий – это домкраты, прессы, натяжные устройства и др.
Ходовые винты предназначены для преобразования вращательного движения в точное поступательное – это металлорежущие станки, штабелеры, хлеборезки и др.
Установочные винты – для точных установок и регулировок в приборах.
Совокупность выступов и впадин на поверхности винта называется резьбой. Контур поверхности резьбы, рассеченной плоскостью, проходящей через ось, называется профилем резьбы (см. рис. 17.1,б). Расстояние между сходными точками профиля, например вершинами выступов, называется шагом резьбы и обозначается буквой t.
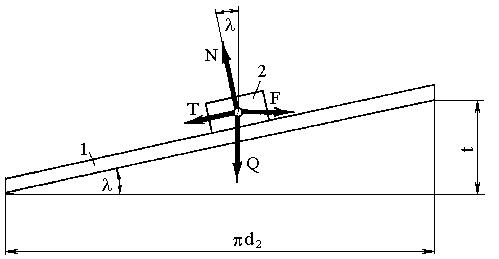
Если прокатить винт по чистому листу бумаги, то винтовая линия оставит след (рис.17.2). Каждая линия следа будет представлять собой наклонную прямую. Угол наклона прямой обозначают буквой λ. Этот угол является углом подъема винтовой линии. Он измеряется по среднему диаметру резьбы d2.
tg |
t |
. |
(17.1) |
|
|||
|
d2 |
|
|
Чем меньше шаг винта t и чем больше диаметр винта, тем меньше угол подъема λ.
Трение в винтовой паре оценивается углом трения φ, тангенс которого равен
tg f |
T |
, |
(17.2) |
|
|||
|
N |
|
|
где f – коэффициент трения, который при слабой смазке для стального винта и бронзовой гайки равен f = 0,1, а для стального винта и чугунной гайки f = 0,15, следовательно, угол трения φ = 5,7…8,50; Т – сила трения между винтом и гайкой; N – нормальная сила давления между витками винта и гайки (см. рис.17.2).
179
Если угол подъема резьбы λ меньше угла трения φ, то такая резьба называется самотормозящей. Для трапецеидальной пары сталь по бронзе самотормозящий угол λ < 50.
Если λ > φ, то при действии осевой силы на гайку винт будет вращаться.
У грузоподъемных механизмов угол λ должен быть самотормозящим (лучше с запасом λ 30). То же должно быть у крепежных болтовых соединений.
Материал винта должен иметь высокую прочность и износостойкость, поэтому винты изготавливают из конструкционных сталей марок 40, 45, 50 с последующей закалкой. Для уменьшения трения гайку изготавливают из антифрикционных материалов чугуна или бронзы.
Основным кинематическим параметром винтовой передачи является шаг винта. Винт представляет собой цилиндр, на который «намотана проволока», имеющая форму треугольника или трапеции. С каждым витком нитка резьбы поднимается на один шаг.
Рис.17.2
За 1 оборот винт передвигает гайку на один шаг t. За nв оборотов винт переместит гайку на расстояние nвt. Поскольку nв оборотов совершается за единицу времени (1 мин), произведение nвt представляет собой путь, пройденный в единицу времени, т.е. скорость
v = nвt , (17.3)
где v –осевая скорость гайки, м/мин; nв – частота вращения винта, об/мин; t
–шаг винта, м.
Переходя теперь к схеме (см. рис. 17.1, а), можно определить скорость подъема платформы в зависимости от частоты вращения электродвигателя
(n7 = n1).
Частота вращения II-го вала

180
n |
|
n |
|
z1 |
, |
(17.4) |
|
z2 |
|||||
|
2 |
1 |
|
|
|
где n2 – частота вращения II-го вала, об/мин; n1 – частота вращения I-го вала, об/мин; z1 и z2 – числа зубьев шестерни и колеса соответственно.
Частота вращения винта (III-го вала) nв = n3 равна
n |
в |
n |
|
|
z3 |
n |
|
z1 |
|
z3 |
, |
(17.5) |
|
z4 |
z2 |
z4 |
|||||||||
|
|
2 |
|
1 |
|
|
|
|
где z3 и z4 – числа зубьев шестерни и конического колеса. Скорость подъема платформы с гайкой
v n |
t n |
|
z1 |
|
z3 |
t . |
(17.6) |
|
z2 |
z4 |
|||||||
в |
1 |
|
|
|
|
Уравнение (17.6) называется уравнением кинематического баланса.
Оно позволяет определить любой входящий в него элемент, если известны другие.
Если один виток резьбы винта развернуть (распрямить) по окружности среднего диаметра d2, то получится своего рода балка 1 с углом подъема λ (рис.17.2).
Изобразим гайку в виде прямоугольника 2, который опирается на балку 1. На гайку действует сила Q, равная весу груза и платформы. Сила Q вызывает нормальную реакцию N и порождаемую ей силу трения Т.
Момент относительно оси винта, который нужно приложить к винту, чтобы поднимать груз,
Мк = 0,5Qd2 · tg(λ+f') , |
(17.7) |
где Мк = F·r2 = F·d2/2 – крутящий момент, Н·м; d2 – средний диаметр резьбы, м (см. рис.17.1,б); F – окружная сила, приложенная по касательной к окружности среднего диаметра резьбы, Н; r2 = d2/2 – средний радиус резьбы, м; λ – угол подъема винтовой линии;
φ' = arctg f’ – приведенный угол трения в резьбе; f’ – приведенный коэффициент трения.
Для винта с трапецеидальной резьбой приведенный коэффициент трения
f |
|
f |
|
|
|
cos 2 |
, |
(17.8) |
|||
|
где f=0,1…0,15 – коэффициент трения в винтовой паре; α = 300 – угол профиля трапецеидальной резьбы.
Для трапецеидальной резьбы cos α / 2 = cos 150 = 0,966 ≈ 1, поэтому можно допустить, что f' = f и φ' = φ.
Угол подъема резьбы λ можно определить из рис.17.2 по формуле
= arctg |
t |
, |
(17.9) |
|
|||
|
d2 |
|
|