Материал: 1798
71
4.3.4. Клин
Клин применяют для выигрыша в силе при необходимости приподнять тяжелый груз в твердой оболочке.
На рис. 4.12 изображен тяжелый ящик 1, который приподнимается клином 2 от поверхности 3. Примем все поверхности твердыми и гладкими.
Применим принцип освобождения от связей. Отбросим от клина ящик 1 и поверхность 3, заменяя их реакциями N и R соответственно.
Клин находится в равновесии под действием трех сил N , R и F . Составим уравнение равновесия клина
X P F Nsin - F = 0;
Y R G N cos R 0,
откуда |
|
|
||||
|
N sin F ; |
N cos G. |
|
|||
Клин вбивается силой F, приподнимая груз G. Их отношение |
|
|||||
|
F |
|
N sin |
tg . |
(4.24) |
|
|
|
|
||||
|
G N cos |
|
||||
Найдем силу F: |
|
(4.25) |
||||
|
|
F = G tg . |
|
|||
Чем меньше угол , тем меньше сила F, тем больше выигрыш в силе. Обычно угол клина выбирают до 15 …20 . Большой угол применять нельзя, так как груз будет сползать. Чтобы этого не произошло, угол выбирают меньше, чем угол трения, т.е. tg f tg ,
где f – коэффициент трения; – угол трения. При таком условии клин становится самотормозящим. Самотормозящие клинья используются для различных стопорящих устройств.
4.3.5.Винт
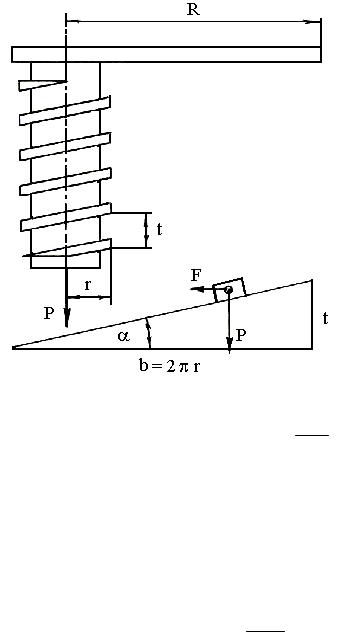
Винт (рис.4.13) можно представить как наклонную плоскость, навитую на цилиндрическую поверхность.
72
Если вращать винт вокруг своей оси, то винтовая линия будет играть ту же роль, что наклонная плоскость. Обозначим: r – средний радиус резьбы; t – шаг резьбы, который показывает, насколько переместится виток резьбы за 1 оборот винта; – угол подъема резьбы (угол наклонной плоскости); Р – сила, действующая в направлении оси винта; F – сила, действующая на виток на расстоянии r от оси винта и необходимая для поворота винта; R – плечо рукоятки.
Для наклонной плоскости (см. уравнение (4.13)) можно записать на основании равенства работ
Рис.4.13
P t F1 2 R .
|
F |
|
t |
|
|
t |
|
tg , |
|
|
|
|
|
|
|||||
|
P в 2 r |
|
|||||||
откуда |
|
|
Pt |
|
|
||||
F = R · tg = |
|
. |
(4.26) |
||||||
|
|
||||||||
|
|
|
|
|
|
2 r |
|||
|
В этой формуле сила F |
||||||||
приложена |
к |
|
витку |
резьбы |
|||||
радиусом r. Если рукоятку сделать с большим радиусом R, то тогда сила F1, приложенная к рукоятке, будет действовать на виток во столько раз большей силой, во сколько радиус R больше радиуса r, т.е.
FF1 R r. Подставив в (4.26)
r. Подставив в (4.26)
ирешив относительно F1, получим
(4.27)
Пример. Требуется поднять груз Р = 3 кН с помощью винтового домкрата, у которого шаг резьбы t = 6 мм; длина рукоятки R = 250 мм.
Применив формулу (4.27), получим
F |
P t |
|
300 6 |
12 Н . |
|
2 250 |
|||
1 |
2 r |
|
||
Выигрыш в силе равен 3000 250 раз!!!
12
73
5.ПЕРЕДАЧИ
5.1.Общие понятия
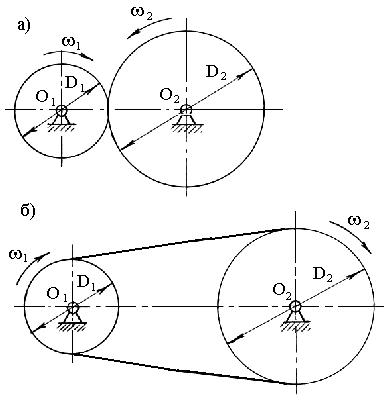
Наибольшее распространение получили механические передачи вращательного движения. Механизмы с возвратно-поступательным движением имеют два существенных недостатка: потери времени на холостые ходы и большие динамические нагрузки при перемене направления движения. Вращательные механизмы движутся плавно, без рывков в одну сторону и с постоянной скоростью. Одноступенчатая передача вращательного движения состоит из двухвалового механизма. Между двумя валами О1 и О2 (рис. 5.1) может быть только одна вращательная кинематическая пара, которую принято называть передачей.
По принципу действия передачи можно разделить на две группы: осуществляемые силой трения и работающие на принципе зацепления двух звеньев. К первой группе относятся ременная, канатная и фрикционная передачи. Ко второй группе – зубчатая,
цепная, червячная и другие передачи.
Рис.5.1
Валы в передаче могут располагаться параллельно и непараллельно. Передачи, понижающие угловую скорость или частоту вращения, называются редукторами. Передачи, повышающие частоту вращения, называются мультипликаторами. Для ступенчатого регулирования скорости применяют передачи, называемые коробками скоростей или
передач.
Зубчатые редукторы применяют в транспортных и грузоподъёмных машинах, конвейерах и транспортерах, станках, сельхозмашинах и т.д.
74
Мультипликаторы применяют в турбокомпрессорах, насосах высокого давления (центробежных) и др.
Вавтомобилях, станках, дорожных машинах применяют коробки передач (скоростей).
Впередаче различают ведущий О1 и ведомый О2 валы. Передача, состоящая только из ведущего и ведомого валов, называется одноступенчатой. Если валов больше двух, то передача –
многоступенчатая.
5.2.Кинематические и силовые соотношения в передачах
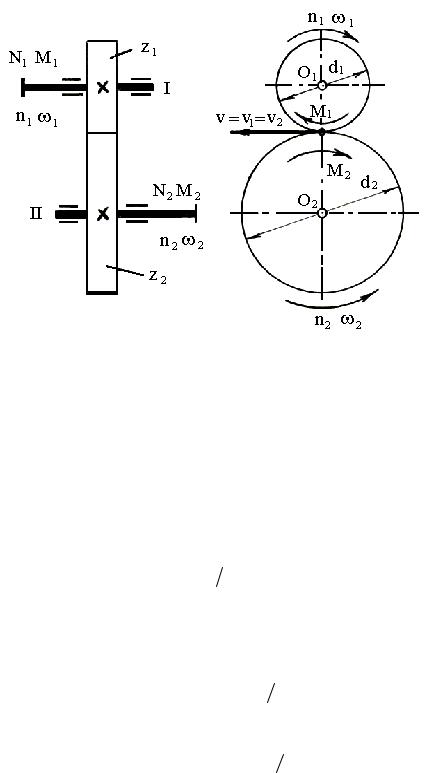
Вкаждой двухваловой передаче различают: ведущий вал I; ведомый или выходной вал II; зубчатые колеса z1 и z2 или фрикционные
колеса d1 и d2.
Такая передача называется одноступенчатой. Основные параметры передачи: мощности на ведущем валу N1 и на ведомом валу N2; угловые скорости 1 и 2 или частоты вращения n1 и n2 на ведущем и ведомом валах соответственно. Этих параметров достаточно для расчета любой передачи.
Зубчатое колесо с меньшим числом зубьев z1 называется шестерней, а с большим числом зубьев z2 – зубчатым коленом или просто колесом.
Рассмотрим производные параметры передачи. Между угловыми скоростями на ведущем и ведомом валах существует взаимосвязь.
Величина, которая показывает во сколько раз передача изменяет скорость вращения, называется передаточным отношением
u |
1 |
|
n1 |
|
z2 |
|
d2 |
. |
(5.1) |
2 |
n2 |
z1 |
|
||||||
12 |
|
|
|
d1 |
|||||
Эта величина определяется отношением угловых скоростей ведущего 1 и ведомого 2 звеньев по ходу движения или отношением зубьев или диаметров против хода движения.
Частным случаем передаточного отношения является передаточное число, величина которого обратная передаточному отношению:
Рис.5.2
i |
1 |
|
z1 |
|
d1 |
|
n2 |
|
2 |
. |
(5.2) |
|
|
|
d1 |
|
|||||||
12 |
u12 z2 d2 |
|
|
1 |
|||||||
Передаточное число применяется в уравнениях кинематического баланса (см.4.1), т.к. числа зубьев z1; z2; z3; z4 и т.д. или диаметры d1; d2; d3; d4 и т.д. идут в этих уравнениях (УКБ) по ходу движения.
75
Рис.5.2
Зубчатая передача (рис.5.1, а) изменяет направление вращения ведомого вала. Ременная передача (рис.5.1, б) не изменяет направления вращения.
Коэффициентом полезного действия двухваловой передачи согласно определению есть отношение полезной мощности к затраченной. Полезная мощность измеряется на выходе механизма, следовательно, это мощность N2. Затраченная мощность измеряется на входе механизма, следовательно, это мощность N1. Тогда КПД
1 N1 N2 . |
(5.3) |
Окружная скорость зубчатых колес, т.е. скорость точки, лежащей на окружности колеса, (рис.5.2) определится по заданной угловой скорости (частоте вращения) и диаметру ведущего звена по формуле
v1 1d1 2. |
(5.4) |
Окружная скорость ведомого звена определится аналогично:
v2 2d2 2. |
(5.5) |
Точка касания А (см. рис. 5.2) принадлежит одновременно и колесу z1, и колесу z2, следовательно,
v1 v2 v.
Если в это равенство подставить значение v1 и v2, то получим