Материал: 1760
−Add real pole – добавить полюс, лежащий на вещественной оси;
−Add real zero – добавить ноль, лежащий на вещественной оси;
−Add complex pole – добавить комплексно-сопряженные полюса;
−Add complex zero – добавить комплексно-сопряженные нули;
−Delete pole/zero – удалить с графиков ненужный полюс/нуль.
Далее идут четыре кнопки для изменения масштаба графиков (активна может быть только одна из них):
−Mouse zoom – увеличение выделенного с помощью мыши участка графика (одновременно по горизонтальной и вертикальной осям);
−Zoom in X – увеличение по горизонтальной оси;
−Zoom in Y – увеличение по вертикальной оси;
−Zoom out (full view) – вернуться к первоначальному масштабу. Последняя кнопка (Context-sensitive help) предназначена для получения
контекстной справки, то есть при активности этой опции, при подведении указателя мыши к какому-либо объекту появляется контекстная подсказка.
6.4.3. Работа с приложением SISO Design Tool
Если в результате анализа САУ был получен вывод о ее неработоспособности с данным регулятором или с заданными его настройками, то есть сделан вывод о необходимости синтеза, то необходимо воспользоваться приложением SISO Design Tool.
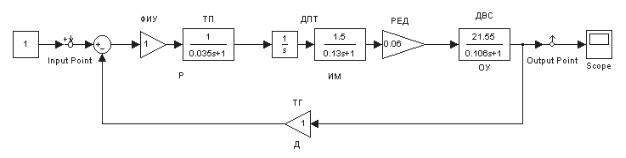
Рассмотрим последовательность действий для синтеза системы автоматического регулирования частоты (САРЧ) вращения вала судового дизеля, структурная схема которой приведена на рис.6.20.
Рис.6.20. Структурная схема САРЧ
САРЧ представляет собой САУ по ошибке, в которую входят:
1)Р – регулятор, представленный фазоимпульсным усилителем (ФИУ) и терристорным преобразователем (ТП);
2)ИМ– исполнительный механизм, представленный двигателем постоянного тока (ДПТ) и редуктором (РЕД);
3)ОУ – объект управления, который представляет собой двигатель
106
внутреннего сгорания (ДВС);
4)Д – датчик, измеряющий текущую частоту вращения, который является тахогенератором (ТГ).
Требуется получить следующие характеристики САРЧ:
1)запас устойчивости по амплитуде: не менее 20 дБ;
2)запас устойчивости по фазе: от 20 до 80 градусов;
3)статическая ошибка: от 0 до ±5%;
4)перерегулирование: не более 20%;
5)время переходного процесса: от 0,5 до 3 с.
Начальные параметры настройки регулятора:
−коэффициент усиления ФИУ: всегда равен единице (не изменяется);
−коэффициент усиления терристорного преобразователя kтп = 1;
−постоянная времени терристорного преобразователя Tтп = 0,035. Настройки регулятора (кроме коэффициента усиления ФИУ) могут из-
меняться: коэффициент усиления терристорного преобразователя – от 0,1 до 10, а постоянная времени терристорного преобразователя – от 0,001 до
0,01.
Анализ САРЧ позволил получить следующие характеристики (при начальных настройках регулятора):
−запас устойчивости по амплитуде 15,3 дБ;
−запас устойчивости по фазе 61,7 градусов;
−статическая ошибка 0%;
−перерегулирование 5,77%;
−время переходного процесса 1,58 с.
Таким образом, САРЧ не проходит только по запасу устойчивости по амплитуде.
6.4.4. Синтез по управляющему воздействию
Для синтеза по управляющему воздействию необходимо произвести следующие действия:
1. Представить систему в виде, пригодном для ее синтеза в SISO Design Tool и перенести части структурной схемы в рабочую область или на диск.
Для этого необходимо выделить:
1)Префильтр F – у данной системы нет звеньев, стоящих между точкой приложения управляющего воздействия и сумматором, поэтому передаточная функция префильтра равна единице.
2)Прямая ветвь G – для данной системы в прямой ветви находятся ИМ
иОУ. Их следует скопировать со структурной схемы САРЧ в новое окно модели и установить точки входа и выхода, как это показано на рис.6.21.
Затем необходимо вызвать окно LTI Viewer (в окне модели – Tools > Linear Analysis) и прорешать модель прямой ветви в этом приложении (в
107
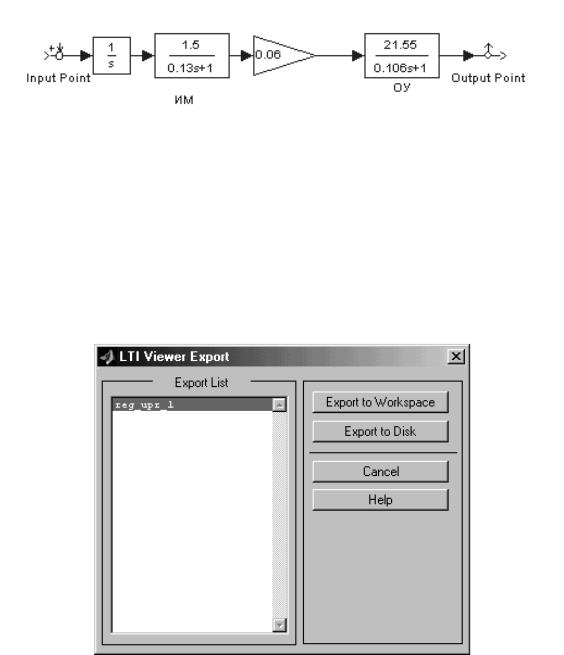
окне LTI Viewer’а – Simulink > Get Linearized Model). При этом в памяти
Рис.6.21. Структурная схема прямой ветви
образуется LTI-модель, адекватная структурной схеме прямой ветви. Теперь необходимо перенести эту модель в рабочую область MATLAB или на диск, для этого необходимо выполнить в окне LTI Viewer’а: File > Export…, в появившемся окне (рис.6.22) выделить в разделе Export List нужную нам систему (для рис.6.22 – reg_upr_1) и сохранить модель прямой ветви в рабочей области (Export to Workspace) или на диске (Export to Disk). В последнем случае потребуется введение имени для сохраняемой модели.
Рис.6.22. Окно экспорта модели LTI Viewer
3)Обратная связь H – у данной системы в обратной связи стоит датчик (ТГ), имеющий передаточную функцию, равную единице;
4)Регулятор С – для данной системы регулятор состоит из ФИУ и ТП. Порядок действий для переноса его в рабочую область или на диск такой же, как и для прямой ветви (рис.6.23).
2. Запустить приложение SISO Design Tool и импортировать в него полученные в предыдущем пункте модели.
Для запуска SISO Design Tool необходимо выполнить в панели Launch
108
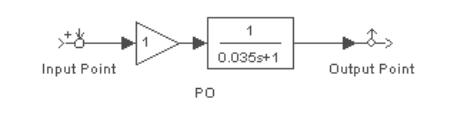
Рис.6.23. Структурная схема регулятора
Pad основного окна MATLAB: Control System Toolbox > SISO Design Tool. В окне SISO Design Tool выполнить: File > Import…, в появившемся окне можно задать имя системы (System Name) и следует выбрать, откуда ведется импорт – из рабочей области (Workspace) или с диска (MAT-File). В списке выбрать нужную нам систему и нажать кнопку со стрелкой, стоящую напротив нужного нам элемента системы (для прямой ветви – выбрать reg_upr_1 и нажать кнопку со стрелкой напротив G (прямая ветвь). После этого в полях элементов системы появится имя соответствующей
модели. Так же импортируется и регулятор.
Так как в нашем случае в префильтре и обратной связи стоят звенья с передаточными функциями, равными единице, то менять в элементах F и H ничего не нужно (по умолчанию там стоят единицы).
После того как экспорт моделей всех элементов завершен, необходимо нажать кнопку “ОК”.
После выполнения вышеописанных действий можно убедиться, что внешний вид графиков изменился и передаточная функция регулятора именно такая, какая нам нужна (в данном примере Wр(s) = kр (1/(1+Ts)). Передаточная функция регулятора (корректирующего звена) приводится в панели корректирующего звена (см. рис.6.11, поз.3).
3. Добиться с помощью SISO Design Tool необходимых характеристик системы.
Сначала следует убедиться, что регулятор находится в нужном месте (в нашем случае в прямой ветви) и обратная связь имеет отрицательный знак, для этого необходимо посмотреть на панель структуры системы (см.
рис.6.11, поз.4).
Если нажать любой кнопкой мыши на неизменяемую часть системы (блоки, обозначенные желтым цветом), то можно увидеть окно сведений по синтезируемой системе (см. рис.6.15), вызываемое активизацией в окне
SISO Design Tool позиции View > System Data. При нажатии на блоке кор-
ректирующего звена появляется окно редактирования корректирующего звена (см. рис.6.17), вызываемое активизацией в окне SISO Design Tool по-
зиции Compensator > Edit.
На логарифмических частотных характеристиках выводятся значения: G.M. – запас устойчивости по амплитуде; P.M. – запас устойчивости по фа-
109
зе; Freq. – значение частоты в соответствующей точке; Stable/Unstable loop
– устойчивая/неустойчивая система.
Кроме того, на графиках логарифмических частотных характеристик выводятся точки, характеризующие устойчивость системы (оранжевый цвет), неизменяемую часть системы (синим цветом: полюса – крестиками, нули – ноликами) и корректирующее звено (красным цветом – полюса и нули).
На корневом годографе точки, характеризующие неизменяемую часть системы и корректирующее звено, выводятся аналогично логарифмическим частотным характеристикам, с тем лишь отличием, что коэффициент усиления корректирующего звена для логарифмических частотных характеристик изменяется с помощью перемещения логарифмической амплитудной характеристики вверх/вниз (изменение значения L(1)), а для корневого годографа это изменение осуществляется перемещением квадратиков, выделенных красным цветом.
Нажимая левой кнопкой мыши на характерные точки графиков, можно вызвать окна сведений по синтезируемой системе (см. рис.6.15) и редактирования корректирующего звена (см. рис.6.17). Нажатие правой кнопки мыши на поле графиков (не на линии) вызывает появление контекстного меню, полученного сведением пунктов командного меню Edit > Root Locus… или Bode… и Compensator > Edit…, описанных выше. Вид контекст-
ного меню зависит от того, на каком из графиков нажать правую кнопку мыши.
Изменяя положение логарифмической амплитудной характеристики вверх/вниз, можно добиться требуемого запаса устойчивости по амплитуде. Для синтезируемой в примере системы, чтобы добиться запаса устойчивости по амплитуде более 20 дБ, необходимо переместить логарифмическую амплитудную характеристику вниз. Для примера, уменьшим коэффициент усиления корректирующего звена до значения 0,5 (рис.6.24) в панели или окне корректирующего звена. В этом случае запас устойчивости по амплитуде становится равным L = 21,3 дБ, а по фазе = 75,2 градуса, то есть показатели устойчивости удовлетворяют их требуемым значениям.
Для того, чтобы оценить показатели качества системы при этих настройках, необходимо получить график переходного процесса, выполнив в командном меню SISO Design Tool: Tools > Loop Responses… > Plant Output (Step). При этом появится окно с графиком переходного процесса
(рис.6.25).
Полученные показатели качества:
-статическая ошибка ст = 0%;
-перерегулирование = 0%;
-время переходного процесса tp = 42 с.
110