Материал: 1760
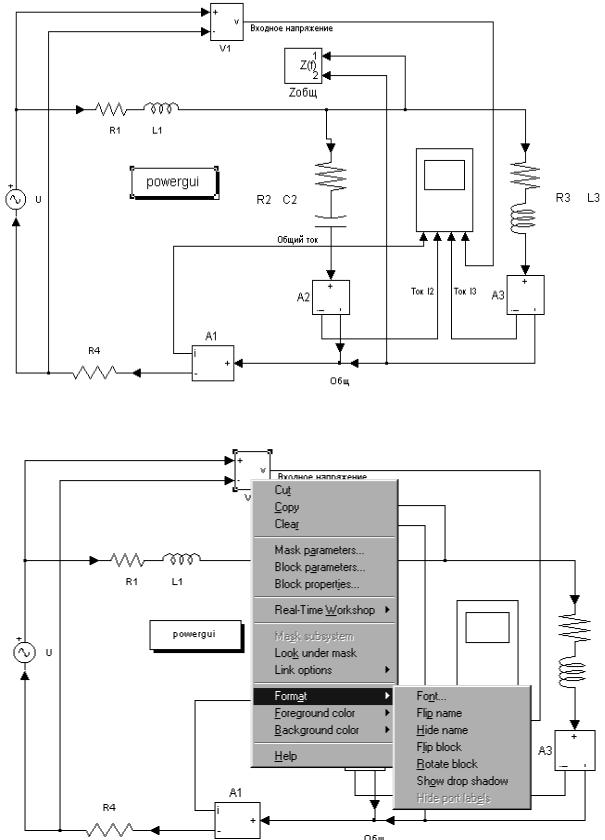
Рис. 10.17. Модель однофазной разветвленной цепи синусоидального тока
Рис. 10.18. Иконка настройки измерителя напряжения
156
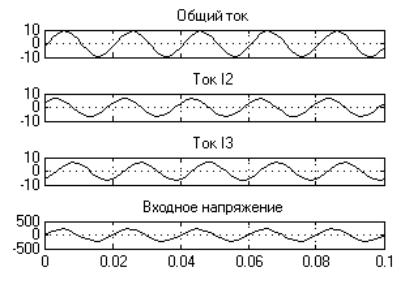
пись-название элемента (Hide name), разворачивать элемент на 1800 (Flip block), поворачивать элемент на 900 (Rotate block), оттенить изображение элемента (Show drop shadow);
Foreground color – создание цветных линий, изображающих блок;
Background color – закрашивание различными цветами тела элемента. Результаты моделирования схемы можно увидеть на осциллографе, где
показаны осциллограммы входного напряжения и токов в ветвях (рис. 10.19).
Рис. 10.19. Осциллограммы токов и напряжения
Определенный интерес представляет блок Powergui, представленный в модели однофазной разветвленной цепи (см. рис. 10.17). Этот блок открывает все возможности графического интерфейса пользователя.
Открыть блок Powergui можно, щелкнув левой мышью по самому блоку и выбрав команду Open block. При этом открывается иконка Powergui (рис.10.20).
Интерфейс Powergui имеет несколько режимов работы:
States –вывод данных о состоянии модели;
Measurements –вывод данных измерений;
Sources – вывод данных об источниках сигналов;
Nonlinear – вывод данных о нелинейных параметрах. Меню интерфейса имеет два пункта:
Tools – доступ к средствам инициализации и контроля состояний;
Report – генерация отчета о моделировании.
157
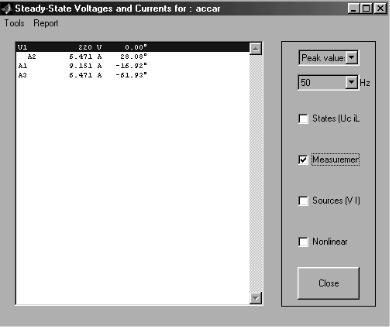
Рис. 10.20. Окно установки параметров Powergui
Вывод данных измерения становится возможным, если частота синусоидального тока источника напряжения или тока соответствует частоте в окне настройки Powergui. Сверху кнопки частоты находится кнопка выбора максимального или действующего значения данных измерения.
Интерфейс Tools позволяет построить частотную характеристику об-
щего сопротивления Zобщ ( режим – Impedance vs Frequency Measurement), а также вызвать блок Control System Toolbox (LTI Viewer), рассмотренный в разделе моделирования систем автоматического регулирования.
10.4. Пример моделирования асинхронного электрического двигателя с короткозамкнутым ротором
В составе библиотеки Power System Blockset имеются разделы, посвященные моделированию синхронных и асинхронных машин, а также машин постоянного тока.
Асинхронные машины получили широкое распространение в основном как двигатели для электрического привода. Это связано с их простотой и нетребовательностью. Пример моделирования асинхронного двигателя, питаемого от трехфазной сети переменного тока, показан на рис. 10.21. Окна установки параметров асинхронной машины и окно измерения ее параметров были приведены на рис.10.9 и 10.10.Последнее окно дает представление о системе параметров асинхронной машины, доступных для регистрации с помощью виртуальных измерительных приборов.
158
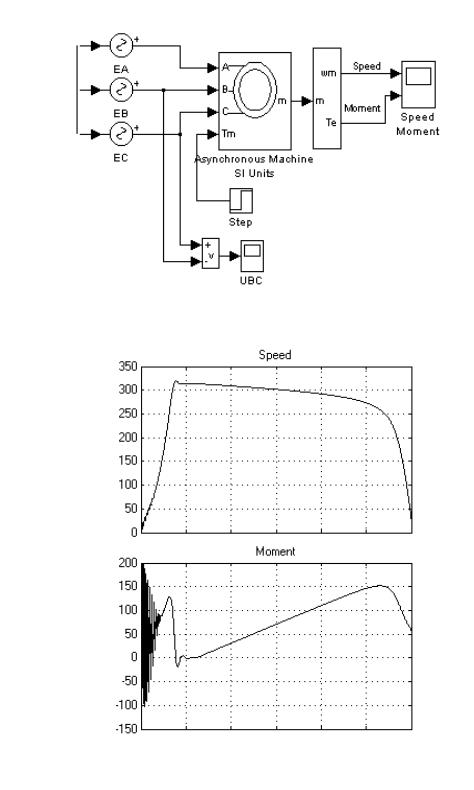
Рис. 10.21. Модель асинхронной машины с короткозамкнутым ротором
0 60 120 180 240 300
Время, мин
.
Рис.10.22. Результаты моделирования асинхронной машины при линейно нарастающей нагрузке .
Приведенные на рис. 10.22 параметры имеет размерность: Speed – c-1, а Moment – кг м.
159
Библиографический список
1.Гультяев А. Визуальное моделирование в среде MATLAB: Учебный курс.– СПб.: Питер, 2000.
2.Гультяев А. MATLAB 5.2. Имитационное моделирование в среде Windows.– СПб.: КОРОНА-принт, 1999.
3.Говорухин В., Цибулин В. Компьютер в математическом исследовании. Maple, MATLAB, Latex: Учебный курс.– СПб.: Питер, 2001.
4.Дьяконов В., Круглов В. MATLAB. Анализ, идентификация и моделирование систем: Специальный справочник. – СПб.: Питер, 2002. – 448 с.: ил.
5.Дьяконов В., Круглов В. Математические пакеты расширения MATLAB: Специальный справочник. – СПб.: Питер, 2001. – 480 с.: ил.
6.Дьяконов В. Simulink: Специальный справочник. – СПб.: Питер, 2002. – 528
с.: ил.
7.Дьяконов В.П. MATHCAD 8/2000: Специальный справочник. –СПб.: Питер, 2000. – 590 с.
8.Дьяконов В. П. MATLAB 6: Учебный курс.– СПб.: Питер, 2001.
9.Дьяконов В. П. Компьютерная математика: Теория и практика.– М.: Нолидж,
2001.
10.Дьяконов В., Новиков Ю., Рычков В. Компьютер для студента: Самоучитель.– СПб.: Питер, 2000.
11.Дьяконов В. П., Абраменкова И.В. MATLAB 5.0/5.3. Система символьной математики.– М.: Нолидж, 1999.
12.Дьяконов В. П. Расширяемые системы для численных расчетов MATLAB// МониторАспект:– 1993:– №2.
13.Дьяконов В. П. Справочник по применению системы PC MATLAB.– М.: Наука; Физматлит, 1993.
14.Данилов А.И. Компьютерный практикум по курсу “Теория управления”. Simulink-моделирование в среде MATLAB: Учебное пособие /Под ред. А.Э. Софиева. – М.: МГУИЭ, 2002.– 128 с.
15.Лазарев Ю. MATLAB 5.0. Библиотека студента.– Киев: Ирина, BHV, 2000.
16.Медведев В.С., Потемкин В.Г. Control System Toolbox. MATLAB 5 для студентов.– М.: Диалог-МИФИ, 1999.
17.Мартынов Н.Н., Иванов А.П. MATLAB 5.х: Вычисления, визуализация, программирование.– М.: КУДИЦ-ОБРАЗ, 2000.
18.Потемкин В.Г. MATLAB 5 для студентов.– М.: Диалог-МИФИ, 1998.
19.Потемкин В.Г. Система инженерных и научных расчетов MATLAB 5.x.– М.: Диалог-МИФИ, 2000.
20.Рудаков П.И., Сафонов В.И. Обработка сигналов и изображений. MATLAB 5.х. / Под общ. ред. В.Г. Потемкина.– М.: Диалог-МИФИ, 2000.
160