Материал: 1760
Для численной оценки используются такие же критерии качества (кроме перерегулирования), как и для управляющего воздействия. Для анализируемой системы (снимается с соответствующих точек на правом графике рис. 5.19) показатели качества имеют следующие значения:
-максимальное значение ymax = − 0,174;
-длительность переходного процесса tпп = 36,3 с;
-установившееся значение yуст = − 0,0154;
-статическая ошибка ст = yуст - yзад = − 0,0154 - 0 = − 0,0154.
При отработке системой автоматического управления возмущающего воздействия эта система должна стремиться к тому, чтобы возмущающее воздействие не влияло на статический режим, то есть ст должна быть как можно меньше или, в идеале, равна нулю (поэтому для возмущающего воздействия yзад = 0). Для этого используют различные способы коррекции (управление по отклонению и т.д.).
В рассматриваемом примере в результате приложения к системе одновременно управляющего и возмущающего воздействий установившееся значение выходного сигнала будет равно сумме значений yуст для этих воздействий: yуст = 0,923 – 0,0154 = 0,9076. Таким же образом можно подсчитать и суммарную статическую ошибку ст = − 0,077 − 0,0154 = − 0,0924.
Таким образом, в результате вышеприведенных действий получен вывод об устойчивости системы, определены запасы устойчивости и показатели качества, которые позволяют сделать общий вывод о правильности настройки системы. Для этого полученные показатели необходимо сравнить с некими требуемыми показателями устойчивости и качества.
Приведенная в примере система стабилизации угловой скорости турбогенератора является системой судовой автоматики, к которой предъявляются следующие требования:
-запас устойчивости по амплитуде: не менее 20 дБ;
-запас устойчивости по фазе: от 20 до 80 ;
-перерегулирование: не более 10%;
-статическая ошибка: не более ±5% (±0,05). Сравниваем полученные значения с требуемыми:
-запас устойчивости по амплитуде: менее 20 дБ и 2,37 дБ;
-запас устойчивости по фазе: от 20 до 80 и 9,75 ;
-перерегулирование: 10% и 76,3%;
-статическая ошибка: 0,05 и −0,077 – не учитывая возмущающее воздействие и −0,0924, учитывая возмущающее воздействие.
Таким образом, анализируемая в примере система с указанными настройками регулятора работоспособна, но нуждается в дополнительной настройке, которая является задачей синтеза. Причем может оказаться, что
сданным регулятором невозможно добиться указанных требований и придется изменить структуру регулятора.
86
6. РЕШЕНИЕ ЗАДАЧ СИНТЕЗА ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, КОРРЕКЦИЯ ИХ ДИНАМИЧЕСКИХ СВОЙСТВ
6.1. Назначение и виды коррекции динамических свойств систем автоматического управления
Задача синтеза систем автоматического управления (коррекция их динамических свойств) состоит в выборе структуры и параметров систем регулирования объектами, которые в соответствии с заданными техническими условиями обеспечивают наиболее рациональные характеристики по запасам устойчивости и показателям качества.
Коррекция осуществляется с помощью введения в систему специальных корректирующих звеньев с особо подобранной передаточной функцией.
Таким образом, задача синтеза включает в себя определение структуры и параметров корректирующих звеньев при известных параметрах остальных звеньев, входящих в систему, с учетом заданных технических условий.
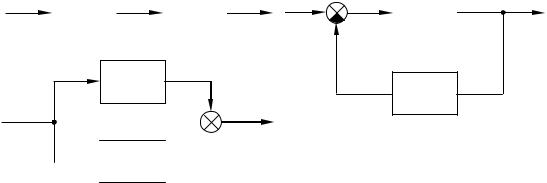
Корректирующие звенья по способу включения можно разделить
(рис.6.1):
1)на последовательные (рис.6.1, а);
2)параллельные (рис.6.1, б);
3)стоящие в обратной связи (местные или главная обратные связи) (рис.6.1, в).
а) |
|
|
|
в) |
|
Wк(s) |
|
Wo(s) |
|
Wо(s) |
|
|
|
|
|||
|
|
|
|
|
|
б)
Wо(s)
Wк(s)
 Wк(s)
Wк(s) 

Рис.6.1. Способы включения корректирующих звеньев в систему: Wо(s) – передаточная функция основных звеньев системы; Wк(s) – передаточная функция корректирующего звена
Действие корректирующих звеньев сводится к следующему:
1)введение в контур САУ пропорциональных воздействий либо
87
воздействий по производным и/или интегралам (дифференцирующие и/или интегрирующие звенья);
2)введение корректирующих воздействий параллельно отдельным звеньям;
3)введение корректирующих обратных связей вокруг отдельных частей системы либо в главную обратную связь системы;
4)введение корректирующих воздействий в функции внешних воздействий и их производных (управление по возмущению).
В непрерывных системах автоматического управления используется множество типов корректирующих устройств и в общем случае их структура может быть любой. Однако в теории автоматического управления выделяют типовые корректирующие звенья, которые называются регуляторами.
По принципу действия регуляторы классифицируют следующим образом:
Пропорциональные (П), имеющие передаточную функцию:
Wп s kп, |
(6.1) |
где kп – коэффициент усиления пропорционального регулятора.
Пропорционально-дифференцирующие (ПД):
Wпд s kп kд s, |
(6.2) |
где kп – коэффициент усиления пропорциональной составляющей регулятора; kд – коэффициент усиления дифференцирующей составляющей регулятора.
Пропорционально-интегрирующие (ПИ):
W |
s k |
|
|
kи |
, |
(6.3) |
|
|
|||||
пи |
|
п |
|
s |
|
|
где kп – коэффициент усиления пропорциональной составляющей регулятора; kи – коэффициент усиления интегрирующей составляющей регулятора.
Пропорционально-интегродифференцирующие (ПИД):
W |
s k |
|
|
kи |
k |
|
s, |
(6.4) |
|
|
|
||||||
пид |
|
п |
|
s |
д |
|
|
|
где kп – коэффициент усиления пропорциональной составляющей регулятора; kи – коэффициент усиления интегрирующей составляющей регулято-
88

ра; kд – коэффициент усиления дифференцирующей составляющей регулятора.
Приведенные выше типовые регуляторы являются идеальными, то есть не учитывающими инерционность составляющих регулятора.
С учетом инерционности регуляторов (реальные регуляторы):
Пропорциональные (П):
W s |
|
kп |
, |
(6.5) |
|
|
|||
п |
Tп |
s 1 |
|
|
|
|
|||
где Tп – постоянная времени пропорционального регулятора.
Пропорционально-дифференцирующие (ПД):
W s |
kп kд s |
, |
(6.6) |
|
|
||||
пд |
Tпд |
s 1 |
|
|
|
|
|
||
где Tпд – постоянная времени пропорционально-дифференцирующего регулятора.
Пропорционально-интегрирующие (ПИ):
kп kи
Wпи s s , (6.7) Tпи s 1
где Tпи – постоянная времени пропорционально-интегрирующего регулятора.
Пропорционально-интегродифференцирующие (ПИД):
|
|
|
|
kп |
kи |
kд |
s |
|
|
|
|
|
|
|
|
||||
|
|
|
Wпид s |
|
s |
|
, |
(6.8) |
|
|
|
|
Tпид s 1 |
|
|||||
|
|
|
|
|
|
|
|||
где |
Tпид |
– |
постоянная |
времени |
|
пропорционально-интегро- |
|||
дифференцирующего регулятора. |
|
|
|
|
|
|
|||
|
Применение идеальных регуляторов в реальных САУ возможно, если |
||||||||
постоянная времени применяемого регулятора достаточно мала и можно принять, что она равна нулю, в этом случае все реальные регуляторы превращаются в идеальные.
Корректирующие обратные связи делятся: − По знаку обратной связи:
89
а) на отрицательные; б) положительные.
Главные обратные связи, как правило, являются отрицательными. Местные обратные связи могут иметь любой знак.
− По составу: а) на жесткие; б) гибкие.
Жесткая обратная связь осуществляется статическим звеном, то есть когда Wос(0) 0. Гибкая обратная связь осуществляется дифференцирующим звеном и Wос(0) = 0, следовательно, в статике сигнал обратной связи отсутствует, то есть гибкая обратная связь действует только в динамике, с чем и связано ее название.
6.2.Получение передаточных функций регуляторов
впакете Simulink
Для получения передаточных функций идеальных регуляторов необходимо составить следующие структурные схемы:
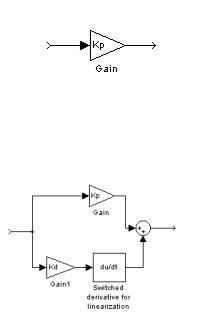
1. П-регулятор, представляет собой идеальное усилительное звено (блок Gain), коэффициентом усиления которого является kп (рис.6.2).
Рис.6.2. Структурная схема идеального П-регулятора в пакете Simulink
2. ПД-регулятор, представляет собой параллельное соединение идеального усилительного звена (блок Gain) и последовательно соединенных идеального усилительного и дифференцирующего (блок Switched derivative for linearization) звеньев (рис.6.3).
Рис.6.3. Структурная схема идеального ПД-регулятора в пакете Simulink
Знак в сумматоре зависит от знака дифференцирующей составляющей. 3. ПИ-регулятор, представляет собой параллельное соединение идеального усилительного звена (блок Gain) и последовательно соединенных идеального усилительного и интегрирующего (блок Integrator) звеньев
(рис.6.4).
90