Материал: 1760
косвенными показателями (интегральные оценки, корневой годограф), позволяющими оценивать влияние изменения параметров замкнутой системы на ее показатели качества по передаточной функции замкнутой системы или по частотным характеристикам разомкнутой системы. В настоящее время, при появлении системы MATLAB и пакета Simulink, получить прямые показатели качества гораздо проще, чем косвенные, к тому же, прямые показатели качества более точно определяют свойства системы, чем косвенные.
Из прямых показателей качества наиболее часто используют следующие величины:
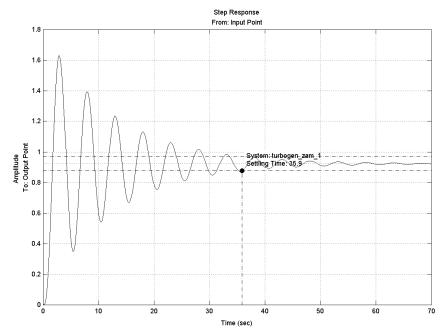
● Время регулирования (длительность переходного процесса) – интервал времени, по истечении которого отклонение переходной характеристики от установившегося значения не превышает некоторой заданной величины. Обычно отклонение управляемой величины от установившегося значения должно быть не более 5%.
В пакете Simulink время регулирования определяется в пакете расширения LTI Viewer с помощью нажатия правой кнопки на поле графика переходного процесса (Step Response) и выбора пункта меню Characteristics > Settling Time (см. рис.5.10) для системы, представленной на рис.5.3.
При этом на графике появляется точка, и после того как подвести к ней указатель мыши, появляется окошко с числовым значением времени переходного процесса (Settling Time).
Рис.5.10. Определение времени переходного процесса
В пакете расширения LTI Viewer по умолчанию установлено отклонение от заданной величины 2%. Для того чтобы изменить это значение, необходимо в командном меню LTI Viewer в пункте Edit выбрать Viewer
76
Preferences. На закладке Characteristics открывшегося окна установить зна-
чение Show settling time within, равное 5%.
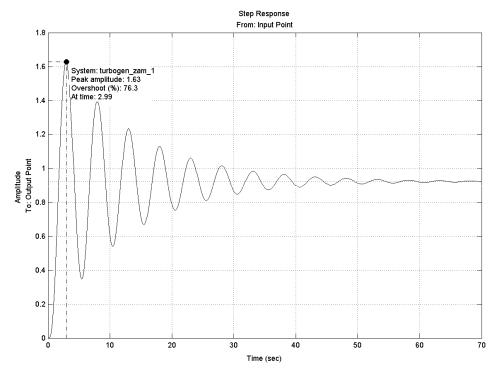
● Перерегулирование ( ) – максимальное отклонение управляемой величины от установившегося значения, выраженное в процентах, – характеризует колебательность переходного процесса.
|
ymax |
yуст |
100%, |
(5.2) |
|
|
yуст
где ymax – максимальное значение выходного сигнала; yуст – установившееся значение выходного сигнала.
Перерегулирование является величиной относительной и хорошо характеризует заброс регулируемой величины. По общим требованиям к системам автоматического управления, перерегулирование не должно превышать 20%.
В пакете Simulink перерегулирование определяется в пакете расширения LTI Viewer с помощью нажатия правой кнопки на графике переходно-
го процесса (Step Response) и выбора пункта меню Characteristics > Peak Response (рис.5.11, для системы на рис.5.3).
При этом на графике появляется точка, после подвода к которой указателя мыши, появляется окошко с числовыми значениями:
−Peak amplitude – максимальное значение выходного сигнала ymax;
−Overshoot – перерегулирование , %;
−At time – время, при котором зафиксировано максимальное значение выходного сигнала.
Рис.5.11. Определение перерегулирования
77
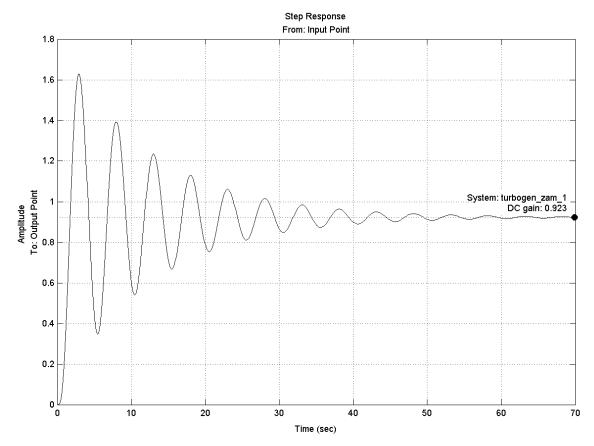
●Установившееся значение выходного сигнала yуст, определяющее статическую точность системы. В системе MATLAB установившееся значение определяется в пакете расширения LTI Viewer с помощью нажатия правой кнопки на графике переходного процесса (Step Response) и выбора пункта меню Characteristics > Steady State (рис.5.12, для системы на рис.5.3).
При этом на графике появляется точка, и после того как подвести к ней указатель мыши, появится окошко с числовым значением установившегося значения выходного сигнала (DC Gain), которое равно коэффициенту передачи замкнутой системы.
●Статическая ошибка системы ст показывает на сколько отличается уровень выходного сигнала от заданного его значения:
ст = yуст – yзад , |
(5.3) |
где yзад – заданное значение выходного сигнала.
Поскольку для получения переходных процессов используется единичный ступенчатый сигнал, то для управляющего воздействия yзад = 1.
● Частота резонанса системы – частота, на которой в системе наблюдаются колебания р с наибольшей амплитудой Аз( р).
Рис.5.12. Определение установившегося значения выходного сигнала
78
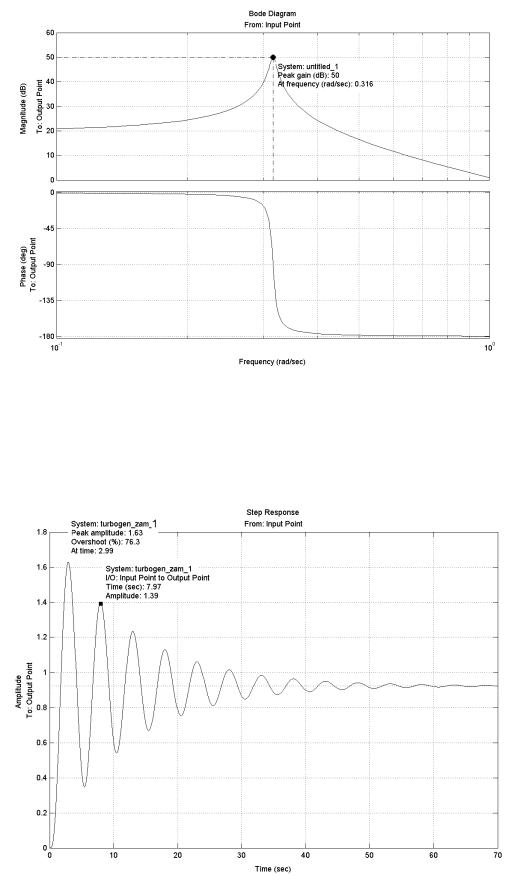
Рис.5.13. Определение резонансной частоты и амплитуды системы
В пакете Simulink частоту резонанса можно найти с использованием пакета расширения LTI Viewer с помощью нажатия правой кнопки на поле графика и выбора пункта меню Plot Type > Bode Mag., повторного нажатия
Рис.5.14. Определение показателя колебательности
79
правой кнопки на поле графика и выбора Characteristics > Peak Response (рис.5.13). Затем нужно подвести курсор мыши к появившейся точке. В результате появится окошко со значениями амплитуды (Peak gain) и резонансной частоты (At frequency) этой точки.
● Колебательность показывает вид переходного процесса и оценивает его колебательность, которая оценивается отношением соседних максимумов:
K |
ymax1 |
100%, |
(5.4) |
|
ymax2 |
||||
|
|
|
||
где ymax1 – значение первого |
пика переходной |
характеристики; |
||
ymax2 – значение второго пика переходной характеристики.
Для пакета Simulink удобно пользоваться отношением максимальной амплитуды выходного сигнала ymax и амплитуды соседнего с ним пика переходной характеристики, который необходимо снять с графика переходного процесса (5.14, для системы на рис.5.3).
В случае, если показатель колебательности К = 1 – переходный процесс апериодический; если К > 1 – колебательный сходящийся, если К < 1, то имеет место расходящийся колебательный процесс. Чем показатель колебательности больше единицы, тем переходный процесс более колебательный.
5.4. Общая методика анализа линейных систем автоматического управления
Для проведения анализа произвольной системы автоматического управления необходимо выполнить следующие действия (в качестве примера далее приводится анализ системы стабилизации угловой скорости турбогенератора).
1. Построить принципиальную или кинематическую схему САУ (рис.5.15) и выделить на ней отдельные функциональные элементы.
В схему входят следующие элементы: Т – турбина (объект управления); МП – механическая передача; ЦБМ – центробежный маятник (выполняет функции датчика, определяющего действительную угловую скорость, задатчика угловой скорости и сумматора, вычисляющего ошибку регулирования); ГУ – гидроусилитель; ГСП – гидравлический сервопривод; ПВК – паровпускной клапан с регулируемым расходом; Г – генератор, приводимый во вращение турбиной.
Некоторой установившейся нагрузке генератора соответствует определенная угловая скорость турбины, положение грузов ЦБМ и поршня ГСП, а также величина открытия ПВК. Если нагрузка уменьшится, угловая скорость турбины возрастет, грузы ЦМБ, а вместе с ними и муфта переместятся вверх (z). Переместится и золотник ГУ (s1), поршень ГСП пока оста-
80