Материал: 1760
ется неподвижным (s2 = 0), так как закрыты окна ГУ. Он приоткроет дос-
|
|
|
ЦБМ |
|
|
s |
|
|
|
|
z |
|
|
|
Т |
ГСП |
|
|
Мн |
|
|
МП |
Г |
|
|
|
|
|
|
|
|
|
m |
ГУ |
|
Пар |
|
|
|
|
|
|
|
|
ПВК |
|
|
Рис.5.15. Принципиальная схема системы стабилизации угловой скорости турбогенератора
туп рабочего тела (жидкости) в верхнюю полость ГСП, поршень которого начнет перемещаться вниз и прикроет ПВК, который, в свою очередь, уменьшит подачу пара в турбину, вследствие чего угловая скорость турбины уменьшится. Одновременно, из-за наличия жесткой обратной связи между ГСП и ГУ (рычаг, связывающий ГСП, ГУ и ЦБМ), золотник ГУ переместится вниз и прикроет окна ГУ и движение поршня ГСП прекратится. Система вновь будет в некотором установившемся режиме.
Таким образом, система стабилизации угловой скорости турбогенератора является замкнутой следящей системой (регулирование по отклонению). Главная обратная связь системы представлена механической передачей (МП). Также в системе имеется местная жесткая отрицательная обратная связь, охватывающая ГСП.
2. На основе принципиальной или кинематической схемы составить функциональную схему системы (рис.5.16).
|
|
|
|
|
|
|
|
|
|
|
mн |
|||
зад |
e |
|
z |
|
х1 х |
|
m |
|
p |
|
|
|
||
ЦБМ |
ГУ |
ГСП |
ПВК |
Т |
||||||||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
х2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
ОС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.16. Функциональная схема системы стабилизации угловой скорости турбогенератора
81
На функциональной схеме показаны следующие сигналы: e – ошибка регулирования (отклонение); z – перемещение муфты ЦБМ; х1 – перемещение золотника ГУ от ЦБМ; х2 – перемещение золотника ГУ от ГСП; х – суммарное перемещение золотника ГУ; m – перемещение ПВК, пропорциональное перемещению поршня ГСП; p – давление пара на входе в турбину; – угловая скорость вращения вала турбины; зад – заданная угловая скорость вращения вала турбины; mн – момент нагрузки на валу турбины.
В любой момент времени с помощью сумматора выполняется сравнение заданного и фактического значений угловой скорости вращения вала турбины (вычисляется ошибка регулирования):
e = зад − . |
(5.5) |
Если ошибка регулирования не равна нулю, то происходят следующие перемещения: муфты ЦБМ (z), золотника ГУ (s), поршня ГСП (m), штока ПВК, вследствие чего изменяется давление на входе в турбину (p). Знаки перемещений зависят от знака ошибки регулирования.
В результате чего изменяется фактическая угловая скорость вращения вала турбины и ошибка регулирования стремится к нулю.
Таким образом, в данной схеме:
●ЦБМ исполняет функции: датчика угловой скорости, задатчика и сумматора (сравнивающего элемента);
●ГУ и ГСП являются ПИ-регулятором;
●ПВК является исполнительным устройством, изменяющим подачу пара в турбину;
●турбина Т является объектом управления.
3. Произвести математическое описание элементов функциональной схемы в виде передаточных функций.
Уравнения отдельных элементов в отклонениях имеют следующий вид:
T2 |
d2z |
T |
dz |
z k e; |
|||||||||
|
|
|
|
||||||||||
1 dt2 |
|
|
|
|
2 dt |
|
|
1 |
|||||
|
|
|
|
|
|
|
x1 k2z; |
|
|
||||
|
|
|
|
x x1 x2; |
|
||||||||
|
|
|
|
|
|
|
dm |
k |
3x; |
(5.6) |
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
dt |
|
|
|
|||
|
|
T |
|
dp |
p k |
|
m; |
||||||
|
|
|
|
|
|||||||||
|
|
3 dt |
|
4 |
|
||||||||
T4 |
d |
k5p k5mн; |
|||||||||||
dt |
|
||||||||||||
|
|
|
|
82 |
|
|
|
||||||
x2 k6m.
Далее преобразуем уравнения в передаточные функции:
W1 s |
Z s |
|
|
|
|
|
|
|
|
|
|
k1 |
; |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
E s |
T2s2 |
T s 1 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
S1 s |
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
||||||||
W s |
|
|
k |
|
|
|
; |
|
|
|
|
|
|
||||||||||||
Z s |
|
|
|
|
|
|
|
|
|
||||||||||||||||
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||
W s |
M s |
|
|
|
|
k3 |
; |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
3 |
|
S s |
|
|
|
|
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|||
W s |
P s |
|
|
|
|
|
|
k4 |
|
|
; |
|
|
(5.7) |
|||||||||||
M s |
|
|
|
|
|
|
|
||||||||||||||||||
4 |
|
|
|
|
|
T3s 1 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
W s |
s |
|
k5 |
; |
|
|
|||||||||||||||||||
|
|
|
|
||||||||||||||||||||||
5 |
|
P s |
|
|
|
|
|
|
T4s 1 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
W5 s |
s |
|
|
|
|
|
k5 |
; |
|
||||||||||||||||
Mн s |
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
T4s 1 |
|
||||||||||||||
W s |
S2 s |
|
k |
|
|
|
. |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
6 |
|
M s |
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
||||||||
Числовые значения параметров: k1 = 10; k2 = 0,6; k3 = 2; k4 = 0,8; k5 = 1; k`5 = 0,2; k6 = 0,4; Т12 = 0,001 с2; Т2 = 0,2 с; Т3 = 5 с; Т4 = 0,3 с.
4. На основании функциональной схемы строим структурную схему сис-
темы (рис.5.17).
|
|
|
|
|
|
|
|
|
|
mн |
|
|
|
|
|
зад |
e |
ЦБМ |
z |
ГУ |
х1 |
х |
ГСП |
m |
ПВК |
W`5 |
|
|
|
||
p |
|
|
|||||||||||||
|
|
||||||||||||||
|
|
||||||||||||||
W1 |
W2 |
W3 |
W4 |
W5 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
х2 |
|
|
|
|
|
Т |
||||
|
|
|
|
|
|
|
W6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.5.17. Структурная схема системы стабилизации угловой скорости турбогенератора
83
Теперь, имея структурную схему системы и зная передаточные функции и числовые значения входящих в них коэффициентов, можно переходить непосредственно к анализу системы с помощью пакета Simulink.
5.Собрать структурную схему в пакете Simulink, используя типовые блоки (процесс сборки схемы и типовые блоки подробно описаны в третьей главе данного учебного пособия).
Поскольку в системе стабилизации угловой скорости турбогенератора кроме управляющего воздействия существует еще и возмущающее воздействие в виде нагрузки на валу турбины, следует провести анализ не только по управляющему, но и по возмущающему воздействию.
Для анализа системы по управляющему воздействию точки входа и выхода (Input and Output point) должны быть расположены так как, показано на рис.5.3 и 5.4, то есть точка входа располагается в месте приложения управляющего воздействия, а выхода – в месте расположения выходного сигнала.
Анализ системы по различным воздействиям производится раздельно. Сначала надо убедиться в устойчивости системы, получить показатели устойчивости и качества по управляющему воздействию, а затем оценить влияние возмущения на переходный процесс системы. Анализ устойчивости по возмущающему воздействию не производится, так как возмущающее воздействие не входит в передаточную функцию системы по управляющему воздействию и, следовательно, не влияет на устойчивость системы в целом.
6.Используя разомкнутую структурную схему системы, без возмущающего воздействия (рис.5.4) с помощью частотного критерия Найквиста (см. рис.5.5 и 5.6) сделать вывод об устойчивости системы по управляющему воздействию и получить значения запасов устойчивости (см.
рис.5.8 и 5.9).
Для анализируемой системы можно сделать вывод об ее устойчивости, так как АФЧХ разомкнутой системы не охватывает точку (−1, j0) и частота
среза ( с = 1,2 рад/с) меньше частоты фазового сдвига ( = 1,39 рад/с). Запасы устойчивости:
-по амплитуде L = 2,37 дБ;
-по фазе = 9,75 .
7. Используя замкнутую структурную схему системы без возмущающего воздействия (см. рис.5.3), получить показатели качества.
Для анализируемой системы показатели качества:
-установившееся значение выходной величины yуст = 0,923;
-ошибка регулирования ст = 0,923 − 1 = − 0,077 (так как на входе единичное ступенчатое воздействие, то yзад = 1);
-перерегулирование = 76,3 %;
-время регулирования tр = 36,9 с.
84
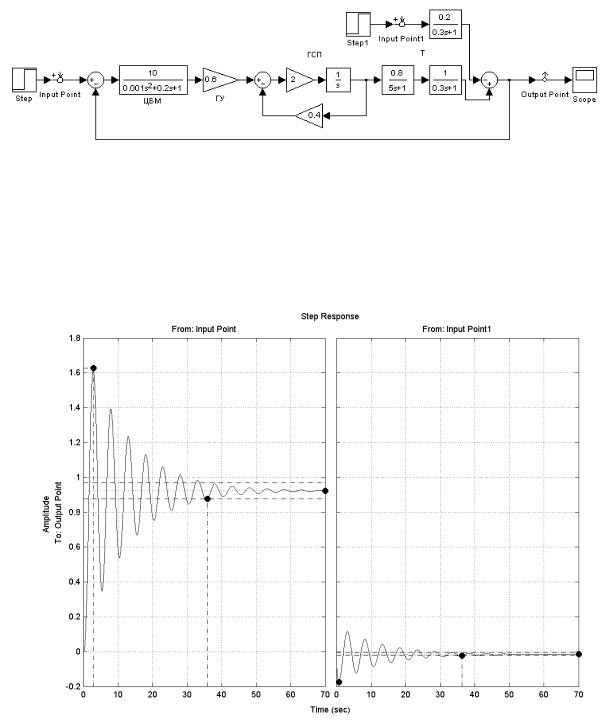
8. Провести анализ влияния возмущающего воздействия на переходный процесс. Для этого необходимо добавить в структурную схему звено с передаточной функцией W`5 (отрицательный знак в передаточной функции W`5 учитывается с помощью сумматора), источник единичного ступенчатого воздействия и разместить еще одну точку входа (Input Point1) (рис.5.18).
Рис.5.18. Структурная схема системы стабилизации угловой скорости турбогенератора с возмущающим воздействием
При этом система анализируется также с использованием LTI Viewer, но в его окне теперь содержится два графика переходных процессов (рис.5.19) – от управляющего (левый) и от возмущающего (правый).
Рис.5.19. Анализ влияния возмущающего воздействия на переходный процесс
85