Материал: 1760

Рис.3.17. Окно параметров звена Transfer Fcn
Рис.3.18. Переходные и частотные характеристики апериодического звена (k = 1, T = 1)
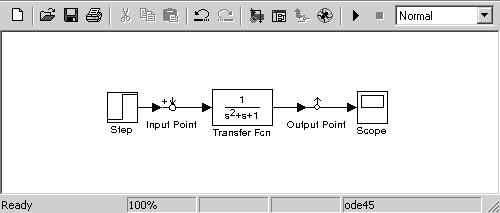
У апериодического звена в числителе находится один параметр – коэффициент усиления k, поэтому в окне Numerator для апериодического звена вводим [k].
Знаменатель апериодического звена Ts +1, то есть полином вида a0s1 + +a1s0, где a0 = T, а1 = 1. Поэтому в окне Denominator для апериодического звена вводим [T 1] (через пробел).
Переходные и частотные характеристики апериодического звена приведены на рис.3.18.
56
3.6. Колебательное звено
Колебательным называют звено, у которого при ступенчатом изменении входной величины выходная величина стремится к новому установившемуся значению, совершая при этом колебания.
Уравнение колебательного звена в операторной форме записи:
T2s2 |
T s 1 y kx, |
(3.11) |
1 |
2 |
|
где T1 и T2 – постоянные времени колебательного звена; k – коэффициент усиления колебательного звена.
Передаточная функция колебательного звена:
W(s) |
Y(s) |
|
k |
|
. |
(3.12) |
|
|
|
||||
|
X(s) |
T2s T s 1 |
|
|||
|
|
|
1 |
2 |
|
|
Постоянные времени колебательного звена T1 |
и T2 связаны зависимо- |
|||||
стью |
|
|
|
|
||
|
= Т2 / 2Т1. |
|
|
(3.13) |
||
Коэффициент называют коэффициентом колебательности и, судя по названию, он характеризует колебательность переходного процесса колебательного звена.
Если < 1, то переходный процесс звена – колебательный, и чем меньше единицы, тем колебательнее процесс.
Если 1, то получаем апериодическое звено второго порядка. Модель для исследования динамических свойств звена состоит из сле-
дующих блоков: Step, Transfer Fcn, Scope.
Полученная модель показана на рис.3.19.
Рис.3.19. Модель колебательного звена (k = 1, T12 = 1, T2 = 1)
Методика изменения коэффициентов звена Transfer Fcn приведена в п.3.5 для апериодического звена, единственное отличие – для колебатель -
57
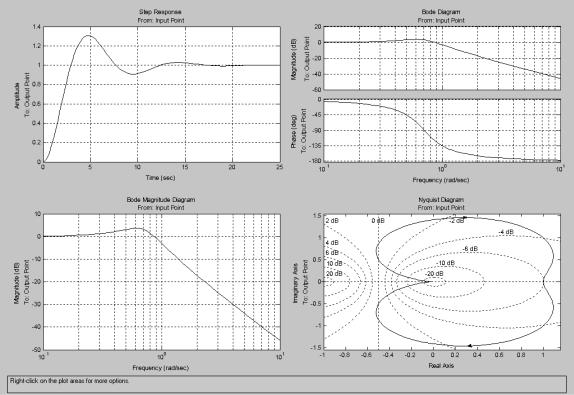
Рис.3.20. Переходные и частотные характеристики колебательного звена (k = 1, T12 = 1, T2 =1)
ного звена в окне Denominator вводим [T12 T2 1] (также через пробел), по-
скольку в знаменателе колебательного звена находится полином вида a0s2 + a1s1 + a2s0, где a0 = T12, а1 = T1, a2 = 1.
Переходные и частотные характеристики колебательного звена представлены на рис.3.20.
3.7. Интегрирующее звено
Интегрирующим называют звено, в котором выходная величина пропорциональна интегралу во времени от входной величины.
Уравнение интегрирующего звена:
sy = kx, (3.14)
где k – коэффициент усиления интегрирующего звена. В интегральной форме:
|
k |
t |
|
|
y |
x k x dt x0. |
(3.15) |
||
s |
||||
|
0 |
|
При ступенчатом входном сигнале выходная величина линейно зависит
от времени: |
|
у = kxt = Kt, |
(3.16) |
где K = kx - постоянная величина; t - время. |
|
58 |
|
В интегрирующем звене скорость изменения выходной величины пропорциональна входной величине.
Уравнение звена в операторной форме:
y |
k |
x. |
(3.17) |
||||
|
|||||||
|
s |
|
|||||
Передаточная функция интегрирующего звена: |
|
||||||
W(s) |
Y(s) |
|
k |
. |
(3.18) |
||
|
|
||||||
|
|
|
X(s) s |
|
|||
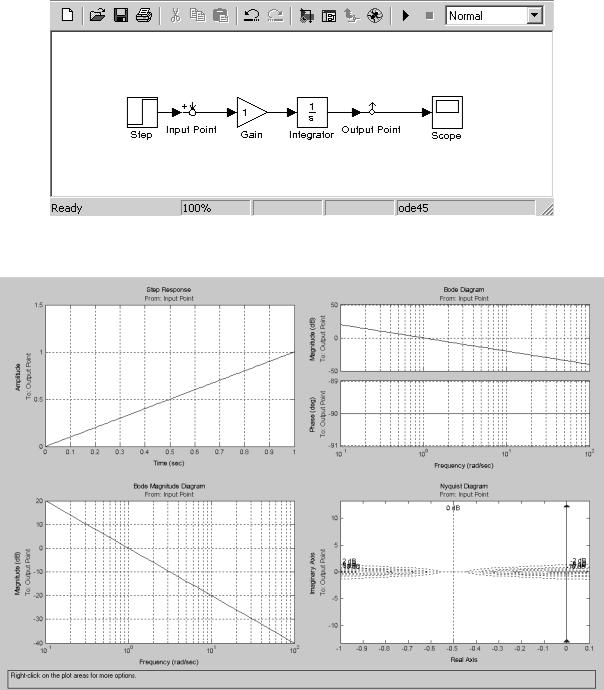
Рис.3.21. Модель интегрирующего звена (k = 1)
Рис.3.22. Переходные и частотные характеристики интегрирующего звена (k=1)
59
Модель для исследования динамических свойств звена состоит из следующих блоков: Step, Gain, Integrator, Scope. В связи с тем, что передаточная функция интегрирующего звена в пакете Simulink всегда 1/s, то для того, чтобы задать коэффициент усиления интегрирующего звена, используется последовательное соединение усилительного (Gain) и интегрирующе-
го звеньев (Integrator).
Полученная модель показана на рис. 3.21.
Учитывая все вышесказанное, для изменения коэффициента усиления интегрирующего звена необходимо изменять коэффициент передачи последовательно соединенного с ним усилительного звена (Gain). Параметры интегрирующего звена (Integrator) изменять не рекомендуется.
Переходные и частотные характеристики интегрирующего звена представлены на рис.3.22.
3.8. Дифференцирующее звено
Дифференцирующим называют звено, в котором выходная величина пропорциональна производной по времени от входной величины. В дифференцирующем звене выходная величина пропорциональна скорости изменения входной величины.
Уравнение идеального дифференцирующего звена в операторной форме записи:
у = ksx. |
(3.19) |
При подаче на вход звена ступенчатого сигнала на выходе получается мгновенный выходной импульс, теоретически имеющий бесконечно большую амплитуду, соответствующую бесконечно большой скорости входно-
го сигнала в момент подачи. |
|
||
Передаточная функция идеального дифференцирующего звена: |
|
||
W(s) |
Y(s) |
ks. |
(3.20) |
|
|||
|
X(s) |
|
|
Модель для исследования динамических свойств звена состоит из сле-
дующих блоков: Step, Gain, Switched derivative for linearization (из раздела Linearization библиотеки Simulink Extras), Scope. Здесь используется звено Switched derivative for linearization (из раздела Linearization библиотеки Simulink Extras), а не звено Derivative из раздела Continuous, поскольку последнее не оказывает нужного влияния на частотные характеристики системы.
В связи с тем, что передаточная функция дифференцирующего звена в пакете Simulink всегда s, то для того чтобы задать коэффициент усиления интегрирующего звена, используется последовательное соединение усилительного (Gain) и дифференцирующего звеньев (Switched derivative for
60