Материал: 1753
10. УСТОЙЧИВОСТЬ СТЕРЖНЕВЫХ СИСТЕМ
10.1. Основные понятия
Под устойчивостью понимают способность элементов конструкций сохранять первоначальное положение равновесия при дейст-
вии на них сжимающих нагрузок. Устойчивость является необходимым условием для каждой инженерной конструкции. Когда первоначальная форма равновесия становится неустойчивой, происходит потеря устойчивости конструкции. Потеря устойчивости может привести к разрушению как отдельного элемента, так и конструкции в целом.
Физическим признаком устойчивости формы равновесия служит поведение нагруженной конструкции при её отклонении от положения равновесия на некоторую малую величину. Равновесие конструкции устойчиво, если после устранения причин, вызвавших её отклонение, она возвращается в исходное положение. Если после устранения причин конструкция не возвращается в первоначальное положение, то её первоначальное положение равновесия неустойчиво. Наи-
меньшая сжимающая нагрузка, при которой происходит потеря устойчивости конструкции, называется критической силой Fкр.
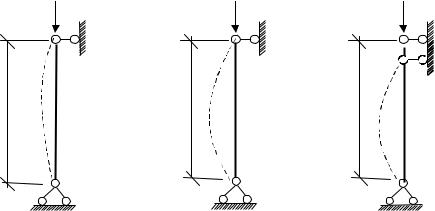
Основы устойчивости упругих систем были разработаны Л. Эйлером (1744 г.). Им впервые решена задача об устойчивости стержня, сжатого силой F (рис. 10.1).
Fв ‹ Fкр |
ℓ |
а |
Fв = Fкр |
Fв › Fкр |
ℓ ℓ
155
б в
Рис. 10.1
Для сжатого силой F стержня при F < Fкр устойчива прямолинейная первоначальная форма равновесия (рис. 10.1, а). Это состояние характеризуется тем, что стержень, отклонённый на малую величину от начального положения равновесия, возвращается в первоначальное положение после устранения возмущений.
При сжимающей силе F = Fкр (рис. 10, б) происходят разветвления форм равновесия, т. е. возможны две формы равновесия прямолинейная и криволинейная. В этом случае стержень испытывает состояние, когда бесконечно малое превышение силы F приводит к потере устойчивости. При F > Fкр (рис. 10, в) устойчивыми становятся криволинейные формы равновесия, что ведёт к разрушению стержня.
На рис. 10.1 пунктиром показаны неустойчивые формы равновесия. Основной задачей исследования устойчивости конструкций является определение критических нагрузок. Критические нагрузки определяются статическими, энергетическими и динамическими методами.
Статический метод. Исследуют равновесие систем в отклонённом состоянии. Получают уравнения, описывающие перемещения систем в отклонённом положении, и определяют величину сжимающей силы, при которой возможно появление новых форм равновесия. Минимальная величина этой нагрузки и будет являться критической силой. Для исследований используют любые методы раскрытия статической неопределимости.
Энергетический метод. Этот метод основан на определении критической нагрузки из условия равенства нулю приращения полной энергии системы при переходе её в новое неустойчивое положение равновесия. Если потенциальная энергия системы при этом возрастает, то первоначальное положение равновесия устойчиво.
Динамический метод. Этот метод основан на использовании колебаний систем. Если колебания системы происходят с уменьшением амплитуды колебаний, то первоначальное положение системы устойчивое. При достижении нагрузкой критического значения внешнее
156
возбуждение приводит к неограниченному росту амплитуд колебаний.
10.2.Определение усилий в сжато-изогнутых стержнях при смещении их опорных закреплений
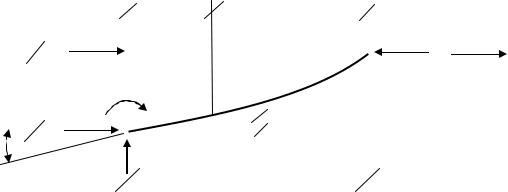
При исследовании устойчивости стержневых систем необходимо определить концевые усилия в стержнях при смещениях их опорных закреплений. Рассмотрим стержень длиной , жёсткостью EJz , сжатый силой F (рис. 10.2).
Предположим, что в результате потери устойчивости стержня, сжатого силой F, левый край его сместился на величину y0 , а поперечное сечение повернулось на угол φ0 . В переместившемся приопорном сечении стержня возникли усилия M0 (изгибающий момент) и Q0 (поперечная сила). Направления Q0 и M0 выбираем в соответствии с принятыми направлениями для поперечной силы и изгибающего момента.
|
|
|
|
|
|
|
x |
|
|
ℓ - x |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
0 |
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
y0 |
|
|
|
|
M0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
F |
|
|
|
y0 –у |
|||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
φ0 |
Q0 |
ℓ |
|
|
|
|
||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.2
В произвольном сечении х стержня значение изгибающего момента определяется выражением
М(x) M0 Q0 x F(y y0). |
(10.1) |
157
Из теории изгиба, рассмотренного в курсе сопротивления материалов, уравнение изогнутой оси стержня записывается
EJz y (x) M (х). |
(10.2) |
||||||
Из равенства выражений (10.1) и (10.2) получаем |
|
||||||
у'' (x) |
M0 Q0x F(y0 y) |
. |
|
(10.3) |
|||
|
|
|
|||||
|
|
|
|
EJz |
|
||
Обозначим в (10.3) |
F |
k2 . Тогда уравнение |
изогнутой оси |
||||
|
|||||||
|
EJz |
|
|||||
стержня принимает вид |
|
||||||
y''(x) k2 y(x) |
(M0 Q0x Fy0) |
. |
(10.4) |
||||
|
|||||||
|
|
|
|
EJz |
|
||
Решением неоднородного дифференциального уравнения (10.4) второго порядка является функция
y(x) C sinkx C |
2 |
coskx |
(M0 Q0x Fy0) |
. |
(10.5) |
|
|||||
1 |
|
k2EJz |
|
||
|
|
|
|
||
Функция (10.5) представляет собой уравнение изогнутой оси сжатого стержня. Согласно известной дифференциальной зависимости, получим выражение для угла поворота:
(x) y'(x) kC coskx kC |
2 |
sinkx |
Q0 |
. |
(10.6) |
|
|||||
1 |
|
k2EJz |
|
||
|
|
|
|
||
Для определения постоянных интегрирования C1 и C2 |
используем |
||||
граничные условия: при x = 0 y = y0 , а у у0 . Подставим эти условия
в (10.5) и (10.6), получаем y0 C2 |
|
M0 Fy0 |
и соответственно |
|
|||
|
|
k2EJz |
|
158
y' |
kC |
Q0 |
. Отсюда постоянные интегрирования C |
|
|
M0 |
и |
||||
0 |
|
y' |
1 |
|
k2EJz |
|
2 |
|
k2EJz |
||
|
|
|
|
Q |
|
|
|
|
|
||
C1 |
0 |
|
|
0 |
. |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
||||
|
|
|
k3EJz |
|
|
|
|
|
|||
После подстановки найденных значений постоянных интегрирования в (10.5) и (10.6) выражения для y(x) и у (x) принимают вид, соответствующий выражениям (10.7) и (10.8).
|
y |
0 |
y' |
sinkx |
|
M |
0 |
(1 coskx) |
Q (kx sinkx) |
|
|
|||||
y(x) |
|
0 |
|
|
|
|
|
|
|
|
0 |
|
. |
(10.7) |
||
|
|
k |
|
|
|
|
k2EJz |
k3EJz |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
y'(x) y0' |
coskx |
M0 sinkx |
|
Q0(1 coskx) |
. |
|
(10.8) |
|||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
kEJz |
|
k2EJz |
|
|
|||
Продифференцировав по длине стержня, получим выражения для определения внутренних силовых факторов.
Mz (x) EJy''(x) kEJy0' |
sinkx M0 |
coskx |
Q0 sinkx |
. |
(10.9) |
|
|
||||||
|
|
|
|
k |
|
|
Qy (x) k2EJy0' |
coskx kM0 sinkx Q0 coskx . |
(10.10) |
||||
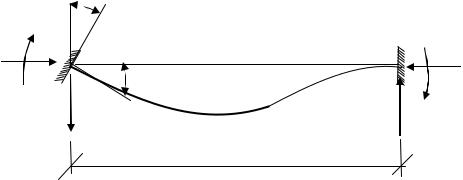
10.3.Определение изгибающих моментов и поперечных сил
вопорных сечениях
Полученные выражения можно использовать для определения усилий в приопорных сечениях стержня при единичных смещениях этих сечений. Для стержня (рис. 10.3), защемлённого с обеих сторон, при повороте левой заделки на угол у0 = 1 имеют место следующие
краевые условия при |
x = 0 прогиб y = 0 и угол поворотау0= 1, а |
|
при x = |
прогиб опоры В у = 0 и угол поворота у = 0. |
|
|
|
|
φ0 = 1
М0
Мℓ
F |
φ0 |
= 1 |
F |
|
159 |
||
|
Q0 |
|
Qℓ |
ℓ