Материал: 1466
3. УРАВНОВЕШИВАНИЕ МЕХАНИЗМОВ
3.1. Основные понятия
Уравновешенным называется механизм, у которого главный вектор и главный момент сил давления на стойку остаются постоянными при заданном движении начальных звеньев.
Целью уравновешивания является устранение переменных воздействий на фундамент.
Пусть FД и МД – главный вектор и главный момент сил давления на фундамент; F и M – главный вектор и главный момент внешних сил, действующих на фундамент; Ф и МФ – главный вектор и главный момент сил инерции звеньев механизма.
По принципу Даламбера имеем /1, 2/:
FД F Ф 0; |
M Д М МФ 0. |
(3.1) |
Тогда условие уравновешивания механизма примет вид /1, 2/:
F Ф 0, М МФ 0 (3.2)
Удовлетворить этому условию путем распределения масс и введения дополнительных внешних сил, действующих на звенья механизма, удается только в редких случаях. Обычно принимают частные условия Ф=0 и МФ=0, которых можно добиться подбором масс звеньев и установкой противовесов /1, 2/.
Распределение масс звеньев, устраняющее давление стойки на фундамент (или опору стойки) от сил инерции, называется уравновешиванием масс механизма.
3.2. Статическое уравновешивание масс плоских механизмов
При уравновешивании масс плоских механизмов обычно ограничиваются условием Ф=0, которое соответствует условию постоянства положения центра масс звеньев механизма относительно стойки. Распределение масс звеньев, приводящее его центр масс в точку, неподвижную относительно стойки, называется статическим уравновешиванием механизмов.
Системой замещающих масс в плоском движении называется система сосредоточенных масс m1, m2, m3, m4, которая обладает той же массой m,
тем же расположением центра масс и тем же моментом инерции JS, что и заменяемое твердое тело плоского механизма.
m1 + m2 + m3 + m4 =m; |
|
m1 х1+ m2 х2+ m3 х3+ m4 х4=0; |
(3.3) |
m1 у1+ m2 у2+ m3 у3+ m4 у4=0. |
|
m1 (х12 + у12) + m2 (х22 + у22) + m3 (х32 + у32) + m4 (х42 + у42) = JS |
(3.4) |
Если выполняется условие (3.3), то размещение замещающих масс называется статическим, если условия (3.3) и (3.4) – динамическим. При динамическом размещении равны также и главные моменты сил инерции.
В частных случаях, число заменяющих масс может быть меньше четырех.
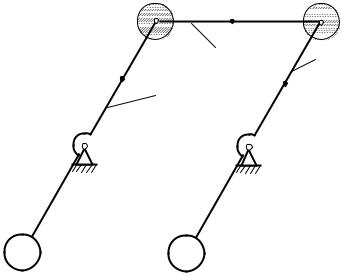
Рассмотрим шарнирный четырехзвенник АВСD (рис. 3.1), у которого центры масс звеньев S1, S2, S3 и S4 лежат на линиях, соединяющих центры шарниров.
B |
S2 |
C |
mB |
|
mC |
|
|
|
|
2 |
3 |
S1 |
|
|
|
S3 |
|
1 |
|
|
А |
|
D |
E mП1 |
m |
П2 |
F |
|
|
|
Рис. 3.1. Четырехзвенный механизм
Массу m1 заменим двумя массами, сосредоточенными в точках А и В. Но для решения задачи, поскольку точка А неподвижна, необходима только масса в точке В – mВ.
mВ1 = m1 lAS1 / lAB . |
(3.5) |
Аналогично заменим массу звена 3, массами, сосредоточенными в точках C и D. Для решения задачи необходима только масса, расположенная в точке С.
mС3 = m3 lDS3 / lCD . |
(3.6) |
Массу звена 2 заменим массами, сосредоточенными в точках В и С:
mВ2 |
= m2 lСS2 |
/ lBС . |
(3.7) |
mС2 |
= m2 lВS2 |
/ lВС . |
(3.8) |
Врезультате получим две подвижные массы, расположенные в точках
Ви С:
mB=mB1+mB2; |
mC=mC2+mС3 |
(3.9) |
Чтобы уравновесить силы инерции замещающих масс mB и mC, достаточно установить на звеньях 1 и 3 противовесы массами mП1 и mП2 , которые определим по формулам /1, 2/:
mП1 lAE = mB lAB , |
|
mП2 lDF = mC lCD , |
(3.10) |
где lAB и lCD – расстояния от осей А и Д до центров масс противовесов. Для статического уравновешивания крипошипно-ползунного
механизма необходимо установить противовесы не только на кривошип, но и на шатун. Если ограничиться только одним противовесом, то возникает задача приближенного статического уравновешивания масс механизма, которую можно решить путем статического размещения масс механизма в точках А, В и С.
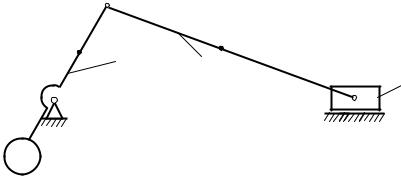
Рассмотрим кривошипно-ползунный механизм (рис. 3.2), у которого центры масс S1, S2 звеньев 1 и 2 лежат на линиях, соединяющих центры шарниров, а центр масс 3 звена S3 – в точке С.
mB  B
B
S1 S2
1 |
2 |
А |
C, S3 3 |
|
E
mП1
Рис. 3.2. Кривошипно-ползунный механизм
Массу, сосредоточенную в точке А, как неподвижную не учитываем. В точке В сосредоточена масса, полученная от размещения масс
кривошипа и шатуна /2/.
mB=mB1+mB2 ;
mВ1 = m1 lAS1 / lAB ; (3.11) mВ2 = m2 lСS2 / lBС .
В точке С сосредоточена масса, равная сумме масс ползуна и части массы шатуна /2/.
mC=mC2+mС3 ; |
|
mС2 = m2 lВS2 / lВС ; |
|
mС3 = m3 . |
(3.12) |
Сила инерции массы mВ полностью уравновешивается противовесом с центром масс в точке Е при выполнении условия /2/.
mП1 lAE = mB lAB . |
(3.13) |
Остается неуравновешенной только сила инерции от массы mC, которая направлена вдоль движения ползуна. В некоторых случаях эта сила не оказывает вредных воздействий на фундамент и тогда такое частичное уравновешивание допустимо. Если же требуется уменьшить воздействие силы инерции от массы mC, то масса противовеса с центром масс в точке Е увеличивается на величину mП2, определяемую из условия получения наименьшей неуравновешенной силы инерции /2/.
3.3. Уравновешивание сил в механизмах
3.3.1. Уравновешивание сил на входном звене
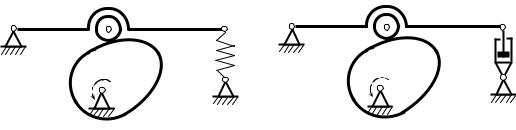
Целью уравновешивания сил на входном звене (обычно применяют для вращательного движения) является выравнивание момента сил на валу двигателя. Достигается это за счет аккумулирования избыточной энергии механизма, с последующей отдачей накопленной энергии механизму (избыточная работа – это разность взятых по модулю движущих сил и работ сил сопротивления). Наиболее часто в качестве рабочего тела, способного аккумулировать и отдавать энергию, используются пружины (рис. 3.3, а), реже – сжатый воздух, действующий на поршень пневмоцилиндра (рис. 3.3, б) /2/.
а) |
б) |
Рис. 3.3. Схемы механизмов с уравновешиванием сил на входном звене
Процессы накопления и отдачи энергии должны происходить по определенной программе, которая предусматривает полное или частичное выравнивание приведенного движущего момента. В качестве программоносителя обычно используют кулачок, профиль которого строится в зависимости от необходимого закона изменения силы, создаваемой силой упругости пружины или сжатого воздуха в пневмоцилиндре /2/.
Уравнение движения механизма при вращающемся выходном звене, жестко соединенным с валом двигателя, в дифференциальной форме имеет вид /2/
|
2 |
dJ |
M Д | МС | , |
(3.14) |
|
||||
J 0,5 |
d |
|||
|
|
|
|
|
где J – приведенный к этому звену момент инерции; – угол поворота входного звена; МД – момент сил на валу двигателя; МС – приведенный момент сил сопротивления.
Пусть вал совершает установившееся вращательное движение. Уравновешивание сил проведем на участке =0 … 2 . Момент МД можно представить как /2/
МД=МСР+ М , (3.15)
где МСР – среднее значение момента; М – приращение.
|
1 |
2 |
|
MCP |
|
MCd . |
(3.16) |
2 |
|||
|
|
0 |
|
|
|
|
момента сил |
Пусть const при изменении приведенного |
|||
сопротивления, т.е. двигатель неограниченной мощности. Тогда уравнение движения (3.14) примет вид /2/
2 |
dJ |
MCP |
|
M МС . |
(3.17) |
|
|||||
0,5 |
|
||||
|
d |
|
|
|
|
Для того, чтобы момент МД на валу двигателя имел постоянное значение, равное МСР, необходимо выполнить условие /2/
МК = М или МК=МД – МСР , |
(3.18) |
где МК – приведенный момент сил упругости пружины или пневматического нагружателя (корректирующий момент).
Из формул (3.17), (3.18) следует, что переменная составляющая