Материал: 1466

A3 A1 Ak , |
(2.16) |
где Ak – амплитуда силы инерции Фk .
Выражение (2.16) представим в виде двух треугольников abd и bcd с общей стороной bd (рис. 2.7,б). Таким образом, для определения неизвестной амплитуды Ak необходимо отложить в произвольном направлении отрезок ac, равный 2А1, найти точку d из условий ad = A2 и cd=A3 и соединить точку d с точкой b. Одновременно можно определить и угол k.
Аналитически определить Ak и k можно по формулам /11/: |
|
||||||||
|
|
|
|
|
|
|
|||
A 0,707 |
|
A2 |
A2 |
2A2 |
|
; |
(2.17) |
||
k |
|
2 |
3 |
1 |
|
|
|
||
|
|
|
A2 |
A2 |
A2 |
|
|
|
|
k |
|
|
1 |
k |
1 |
|
|
(2.18) |
|
arccos |
|
|
2A A |
. |
|||||
|
|
|
|
1 |
k |
|
|
|
|
Таким образом, для устранения неуравновешенности в плоскости М необходимо установить корректирующую массу с дисбалансом Dk A1 / Ak
под углом k или + k к первоначальному положению корректирующей массы с дисбалансом Dk /11/.
Аналогичным образом устраняется неуравновешенность в плоскости коррекции М. Для этого ротор устанавливается таким образом, чтобы ось качания рамы лежала в плоскости коррекции N /11/.
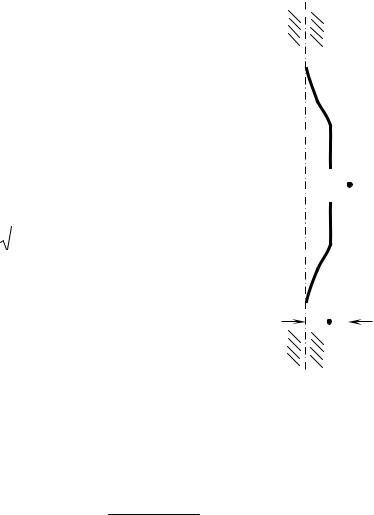
2.5. Уравновешивание гибкого ротора
Гибким называется ротор у которого расстояние между опорами значительно больше его диаметра. Для гибкого ротора при определении дисбаланса следует учитывать изгибные деформации как вала, так и самого ротора. Для того, чтобы выявить основные закономерности, связывающие деформации изгиба вала и дисбаланс ротора, рассмотрим вертикально установленный вал, на котором укреплен диск массой m (рис. 8). Центр масс диска смещен от оси вала на расстояние rS. Масса вала намного меньше массы диска, поэтому ею пренебрегаем. Вал вращается с заданной угловой скоростью . Под действием центробежных сил инерции вал прогибается на величину х. Прогиб вала и сила инерции Ф связаны между собой уравнением /11/
х = 1 m (rS + x) 2, |
(2.19) |
где 1 – прогиб вала, вызванный единичной силой в рассматриваемом сечении.
Отсюда |
|
|
|
|
2r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
x |
|
|
|
|
|
S |
. |
|
(2.20) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
При |
некотором |
значении |
угловой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
скорости знаменатель дроби (2.20) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
обращается в нуль, а прогиб вала х . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Это значение |
называется критической |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
S |
||||||||||||||
угловой скоростью к /11/: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
к |
|
|
|
|
|
. |
|
|
(2.21) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
1/ 1m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Значение |
|
критической |
угловой |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
скорости |
вала |
|
|
можно |
считать |
как |
|
|
х |
|
|
|
|
|
|
rS |
|||||||||
|
|
|
|
|
|
||||||||||||||||||||
собственную |
частоту |
рассматриваемой |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
системы; поскольку на вал действуют |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
силы сопротивления, то при |
= к |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
действительный прогиб вала х не |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
стремится |
к |
бесконечности, |
а |
имеет |
Рис. 2.8. Гибкий ротор |
|
|
||||||||||||||||||
максимальное значение.
Подставим в формулу (2.20) выражение (2.21) и получим /11/
x |
rS |
|
к / 2 1 . |
(2.22) |
Из полученного выражения видно, что при < к прогиб х > 0 (дорезонансный режим). Таким образом, в зарезонансном режиме сдвиг фаз между колебаниями вынуждающей силы и собственными колебаниями равен . С увеличением угловой скорости в зарезонансном режиме прогиб вала х уменьшается, а при стремится к смещению rS. В зарезонансном режиме центробежная сила инерции будет равна /11/
Ф m(r |
x) 2, |
(2.23) |
S |
|
|
т.е. с увеличением угловой скорости происходит уменьшение дисбаланса. Если на валу укреплено несколько дисков, то такая колебательная система будет иметь несколько критических (резонансных) угловых
скоростей /11/.
Особенность балансировки такого ротора заключается в том, что плоскости коррекции не могут быть выбраны произвольно. По методическим указаниям к ГОСТ 22061–76 можно установить оптимальные плоскости коррекции. Установка корректирующих масс в оптимальных плоскостях коррекции вызывает минимальные прогибающие моменты в теле ротора и позволяет на частоте вращения ниже первой резонансной сохранить полученную уравновешенность ротора в широком диапазоне частот вращения /2/.
Согласно ГОСТ 19534–70 к «жестким» роторам относятся роторы, у которых после балансировки в двух произвольно выбранных плоскостях коррекции на частоте вращения ниже первой резонансной системы «ротор
– опоры» значения остаточных дисбалансов в плоскости опор не превзойдут допустимых значений на эксплуатационных частотах вращения. Все остальные роторы относятся к «гибким» /2/.
2.6. Станки для статической и динамической балансировки роторов
Даже полностью сбалансированный на стадии проектирования ротор после изготовления обладает некоторой неуравновешенностью. Появление неуравновешенности вызвано неоднородностью материала, отклонением фактических размеров от номинальных. Данная неуравновешенность устраняется на специальных балансировочных станках /13/.
Для роторов, имеющих малые размеры вдоль оси вращения, можно ограничиться статической балансировкой. В этом случае определяется только главный вектор дисбалансов D. Если не требуется высокая точность балансировки, то она может быть выполнена в статическом режиме способом, описанным выше (п.2.2). Существует другой, более точный способ определения статической неуравновешенности в динамическом режиме, т.е. в процессе вращения ротора /13/.
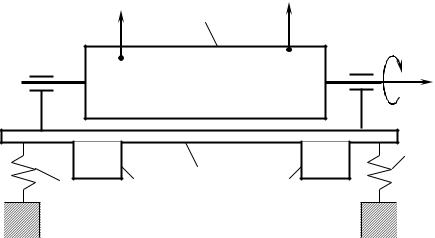
На рис. 2.9 показана схема балансировочного станка, работающего по этому принципу. Ротор 1 закрепляется на шпинделе 4, который вращается с постоянной угловой скоростью относительно плиты 2. Через упругие элементы 3 плита опирается на станину. С помощью мягкой пружины 5 масса сейсмического датчика 6 связана с плитой 2. Жесткость пружины 5 выбирается таким образом, чтобы собственная частота колебаний массы датчика была значительно ниже частоты вращения ротора. Масса 6 может свободно совершать прямолинейное движение вдоль оси х, которая проходит через центр масс плиты. В процессе вращения шпинделя и ротора ось z ротора вследствие его неуравновешенности совершает пространственное движение. Горизонтальная составляющая, направленная
z |
|
D |
3 |
4 |
1
x 3
5 6
Рис. 2.9. Схема балансировочного станка
вдоль оси z воспринимается массой 6. Сейсмический датчик преобразует вынужденные колебания массы 6 относительно плиты 2 в ЭДС. Полученное значение ЭДС обрабатывается в электронном счетнорешающем устройстве, которое является неотъемлемой частью балансировочного станка. В результате устройство выдает значения угловой координаты и модуля главного вектора D дисбалансов ротора. После этого оператор устраняет неуравновешенность либо установкой дополнительной массы, либо удалением части материала /13/.
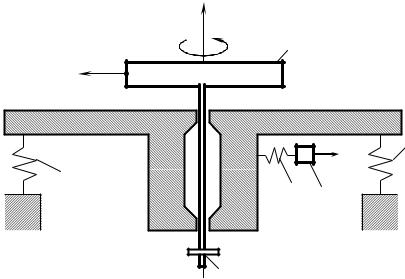
Для роторов, имеющих значительные размеры вдоль сои вращения, необходима динамическая балансировка, поскольку главный момент дисбалансов будет значительным. Как уже отмечалось выше, такая неуравновешенность будет выражаться главным вектором дисбалансов D и главным моментом дисбалансов D. Динамическую неуравновешенность можно условно представить в виде неуравновешенности двух точечных масс и дисбалансами D1 и D2 /13/.
Рассмотрим динамическую балансировку ротора на балансировочном станке (рис. 2.10), у которого ось вращения балансировки ротора совершает пространственное движение. Ротор 1 вращается с постоянной угловой скоростью в подшипниках, смонтированных на плите 2, которая установлена на станине на четырех пружинах 3. На плите 2 установлены два сейсмических датчика 4 и 5 /13/.
1
D1 D2
z
|
|
3 |
|
3 |
4 |
2 |
|
4 |
|||
|
Рис. 2.10. Схема станка для динамической балансировки роторов
В процессе вращения ротора, вследствие его неуравновешенности, ось z и плита 2 совершают пространственное движение. Датчики преобразуют механические колебания в ЭДС. Счетно-решающее устройство (на рисунке не показано) обрабатывает сигналы с датчиков и выдает отдельно величину дисбаланса D1 и дисбаланса D2, т.е. оба дисбаланса
определяются одновременно. После определения D1 и D2 оператор балансирует ротор в плоскостях коррекции удалением (добавлением) материала /13/.