Материал: 1466
момента М, необходимая для поддержания постоянной угловой скорости, должна создаваться не двигателем, а нагружателем /2/.
Из уравнения (3.17) при условии (3.18) имеем /2/
2 |
dJ |
|
|
|
MK 0,5 |
|
MCP МС . |
(3.19) |
|
d |
||||
|
|
|
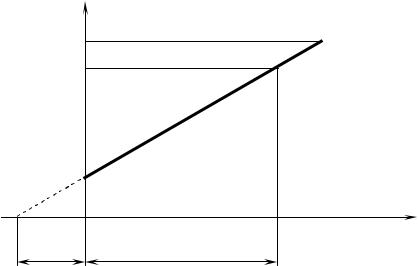
Определим требуемый закон изменения деформации пружины. Характеристика пружины показана на рис. 3.4.
F
Fпред
Fmax
Fmin
x
xМ xmax
Рис.3.4. Упругая характеристика пружины
Сила упругости пружины F связана с деформацией х линейной зависимостью
F = c (x + xМ), |
(3.20) |
где с – коэффициент жесткости; xМ – монтажная деформация (постоянная величина, численно равная отношению упругой силы пружины в начальном положении Fmin к коэффициенту жесткости с).
Максимальное значение упругой силы пружины Fmax должно быть меньше Fпред. Fпред определяется из условия прочности /2/.
Элементарная работа корректирующего момента МК равна элементарной работе сил упругости пружины /2/:
MK d F d . |
(3.21) |
Сила F имеет знак минус в режиме накопления потенциальной энергии пружины, знак плюс – в режиме отдачи накопленной энергии.
Проинтегрировав соотношение (3.21), можно получить зависимость х( ), при которой выполнится заданная программа изменения корректирующего момента МК.
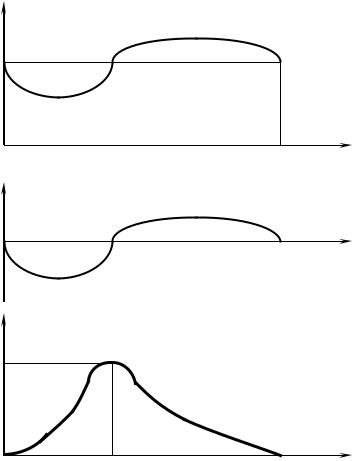
Пусть до введения МК момент МД в установившемся движении задан функцией (рис. 3.5, а) /2/
M Д ( ) Мср |
|
2 |
|
dJ |
п |
, |
(3.22) |
2 |
|
|
|
||||
|
|
|
d |
|
|||
а) МД
Мср
0 |
2 |
|
б) МК
0 |
m |
2 |
|
в)
х
xmax
0 |
m |
2 |
|
Рис. 3.5. Определение характеристики пружины
где Мср – среднее значение МД. Корректирующий момент определим как
МК= МД – Мср. |
(3.23) |
На участке 0 m корректирующий момент имеет знак минус, что соответствует накоплению потенциальной энергии пружины (рис. 3.5, б). На участке m 2 происходит отдача накопленной
потенциальной энергии и корректирующий момент имеет положительный знак /2/.
Проинтегрируем выражение (3.23) на участке накопления потенциальной энергии и получим /2/:
x
MKd c(x xМ )dx |
(3.24) |
|||||||
0 |
|
0 |
|
|
|
x x2). |
|
|
A 0,5c(2x |
м |
(3.25) |
||||||
H |
|
|
|
|
|
|
|
|
Отсюда |
|
|
|
|
|
|
|
|
x x |
ст |
x |
2 |
2A /c . |
(3.26) |
|||
|
|
|
м |
H |
|
|||
Максимальное значение накопленной энергии Amax (при x=xmax) будет равно /2/
A |
0,5c(2x |
м |
x |
max |
x2 |
), |
(3.27) |
max |
|
|
max |
|
|
||
|
|
m |
|
|
|
||
где |
Amax MKd . |
|
(3.28) |
||||
|
|
|
0 |
|
|
|
|
Таким образом, условие выбора коэффициента жесткости будет иметь вид /2/
c |
2Amax |
|
2xмxmax xmax2 . |
(3.29) |
Подставим выражение (3.29) в (3.26) и получим формулу для определения перемещения х конца пружины на участке накопления потенциальной энергии (рис. 3.4. в).
x x |
м |
|
x2 |
(2x |
м |
x |
max |
x2 |
) |
АН |
. |
(3.30) |
|
||||||||||||
|
|
м |
|
|
max |
|
A |
|
||||
|
|
|
|
|
|
|
|
|
|
max |
|
|
Для участка отдачи потенциальной энергии получим /2/:
|
|
|
|
|
|
|
|
|
|
xmax |
|
|
|
|
|
|
||
|
|
|
|
MKd |
c(x xм)dx , |
(3.31) |
||||||||||||
|
|
|
|
0 |
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
или |
A |
c x |
м |
x |
max |
0,5c x2 |
|
c x |
м |
x 0,5c x2) . |
(3.32) |
|||||||
|
от |
|
|
|
|
|
|
|
max |
|
|
|
|
|||||
|
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
x x |
м |
|
|
(x |
м |
x |
max |
) |
2 2A |
/c . |
(3.33) |
|||||
|
|
|
|
|
|
|
|
|
|
|
от |
|
||||||
Максимальное значение отдаваемой потенциальной энергии Amax определяется по формуле (3.28). Коэффициент жесткости с находится по

выражению (3.29). Подставим данное выражение в (3.33) и получим /2/
x x |
м |
|
(x |
м |
x |
max |
) |
2 (2x |
м |
x |
max |
x2 |
) |
Аот |
. |
(3.34) |
|
||||||||||||||||
|
|
|
|
|
|
|
max |
|
A |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
max |
|
|
Если требуемый корректирующий момент МК за время цикла имеет более двух экстремумов, то указанная процедура вычисления перемещений х повторяется для каждой пары соседних участков накопления и отдачи потенциальной энергии, причем коэффициент жесткости с определится по наибольшему значению Amax /2/.
3.3.2. Уравновешивание сил на выходном звене
Целью уравновешивания сил на выходном звене является выравнивание сил, действующих на выходное звено со стороны смежных звеньев /2/. Обычно уравновешивание проводят для выходного звена, совершающего возвратное движение. Уравновешивание позволяет уменьшить значение реакций в кинематических парах. Такие уравновешивающие устройства принято называть разгружающими устройствами или разгружателями. Действие разгружателей основано на накоплении избыточной энергии с последующей отдачей ее механизму /2/.
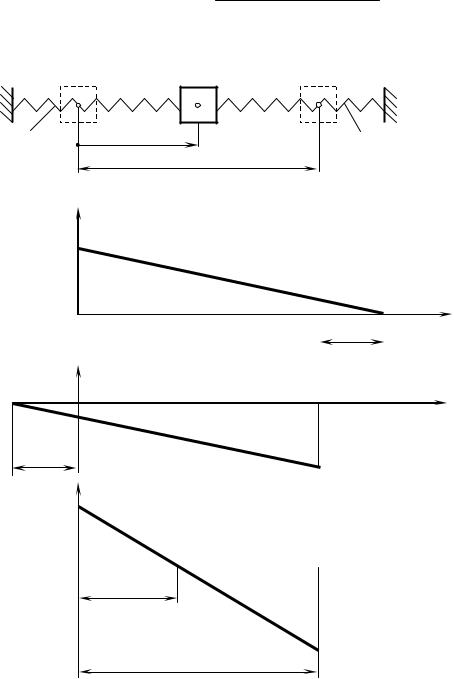
Рассмотрим выходное звено механизма, совершающее возвратнопоступательное движение (рис. 3.6). Уравновешивание сил может быть проведено установкой двух пружин сжатия 1 и 2, что позволяет изменить знак корректирующей силы FК при переходе от участка разбега к участку выбега выходного звена.
Силы упругости пружин 1 и 2 будут равны /2/: |
|
Fу1 = с1 (хМ1 + хmax – х) , |
(3.35) |
Fу2 = – с2 (хМ2 + х) , |
(3.36) |
где хМ1 и хМ2 – величины монтажных деформаций пружин 1 и 2. |
|
Корректирующая сила будет равна сумме сил Fу1 и Fу2 /2/: |
|
Fкор = Fу1 + Fу2 = с1 хМ1 – с2 хМ2 + с1 хmax – (с1 + с2) х . |
(3.37) |
Определим значение координаты х=х0 в положении покоя, т.е. Fкор =0.
с1 хМ1 – с2 хМ2 + с1 хmax – (с1 + с2) х0 = 0 , |
(3.38) |
откуда
|
x0 |
c1xМ1 с2xМ 2 xmax . |
(3.39) |
|
|
c1 c2 |
|
|
с1 |
с2 |
|
1 |
х |
2 |
а) |
|
|||
|
|
||
|
|
xmax |
|
Fу1
б)
0 |
xM1 |
|
x |
|
|||
Fу2 |
|
|
x |
|
|
||
0 |
|
|
в)
xM2
Fкор
г)
x
0  x0
x0
xmax
Рис. 3.6. Уравновешивание выходного звена
Подставим выражение (3.39) в формулу (3.37) и получим /2/:
Fкор =(с1 + с2) (х0 – х) . |
(3.40) |
В случае, когда обе пружины имеют одинаковую жесткость, т.е. с1=с2=с, формула (3.40) и выражение (3.39) примут вид /2/: