Материал: 1466
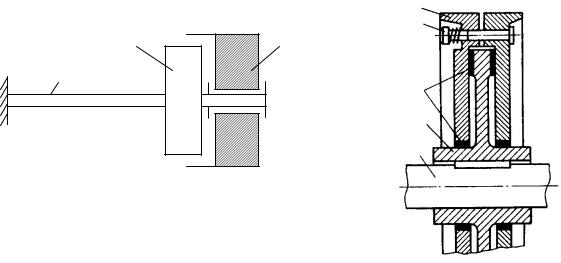
где max – амплитуда угловых колебаний вала при отсутствии демпфера. В качестве примера на рис. 4.27 показана конструкция поглотителя с
сухим трением. Ступица 1 жестко соединена с валом 2 и вовлекает во вращение, через фрикционные диски 3, маховик 4, свободно насаженный на вал. Степенью сжатия пружины 5 обеспечивается необходимая величина силы сухого трения. При колебаниях вала происходит относительное проскальзывание маховика и ступицы, приводящее к рассеиванию энергии вследствие трения на фрикционных поверхностях /1/.
4
5
J Jг
с
3
1
2
Рис. 4.26. Расчетная схема
Рис. 4.27. Конструкция
поглотителя колебаний с сухим
поглотителя колебаний
трением
с сухим трением
К недостаткам поглотителей сухого трения можно отнести непостоянство момента трения, вследствие износа и загрязнения трущихся поверхностей, а также возможность перекоса и заедания дисков /1/.
4.6.2. Поглотители колебаний с вязким трением
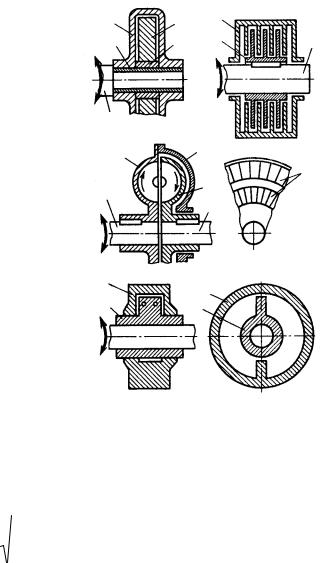
Схемы простейших поглотителей колебаний вязкого типа, присоединенные к демпфируемому объекту с одной степенью свободы, показаны на рис. 4.28. Поглотители колебаний используются для подавления как продольных, так и крутильных колебаний вне зависимости от закона изменения колебаний. По сравнению с динамическими гасителями с трением поглотители колебаний менее эффективны при подавлении моногармонических колебаний. Однако в ряде случаев им все равно отдают предпочтение из-за простоты конструкции и отсутствия упругого элемента, склонного к усталостным разрушениям /1/.
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
4 |
2 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Поведение поглотителя коле- |
|
1 |
5 |
1 |
||||||||||||||
|
|
|
|
|
|
|||||||||||||
баний |
может |
|
быть |
описано |
M(t) |
|
|
|
M(t) |
|||||||||
уравнениями |
|
(4.24) |
в |
случае |
|
|
|
|
|
|
||||||||
продольных |
|
колебаний |
|
|
либо |
|
|
3 |
|
|
|
|||||||
уравнениями |
|
при |
крутильных |
|
|
|
|
|
||||||||||
|
|
|
1 |
|
|
2 |
||||||||||||
колебаниях /1/: |
|
|
|
|
|
|
|
|
|
в) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
6 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i t |
; |
|
|
|
3 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
||||||
J b( г ) c M0e |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
(4.64) |
M(t) |
|
|
|
|
|
||||
Jг г |
bг ( г |
) 0 |
|
|
|
|
|
|
|
|||||||||
при условии, что сг 0. |
|
|
|
|
|
|
г) |
2 |
|
|
|
2 |
||||||
При |
0 bг |
/2mг 0 |
0 |
|
|
и |
|
|
|
|
||||||||
|
|
1 |
|
|
|
1 |
||||||||||||
0 получим системы с одной |
M(t) |
|
|
|
|
|
||||||||||||
степенью свободы. Их ампли- |
|
|
|
|
|
|
||||||||||||
тудно-частотные |
характеристики |
|
|
|
|
|
|
|||||||||||
показаны на рис. 4.29. Наилучшая |
|
Рис. 4.28. Схемы поглотителей |
||||||||||||||||
настройка |
|
поглотителя |
|
|
|
дает |
|
|||||||||||
максимум амплитуды в точке В. |
|
|
колебаний вязкого типа |
|||||||||||||||
|
|
|
харак-теристики в точке В |
|||||||||||||||
Величина |
0, |
обеспечивающая |
экстремум |
|
||||||||||||||
(сплошаная линия), определяется соотношением /1/ |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
. |
(4.65) |
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2(2 )(1 ) |
|
|||||
На рис. 4.28,а показана простейшая конструкция поглотителя колебаний вязкого типа. Втулка 1 жестко связана с кожухом 2 и насажена на вал 3, крутильные колебания которого необходимо погасить. Расположенный внутри кожуха маховик 4, благодаря вкладышу 5, имеющему малый коэффициент трения, может проскальзывать относительно втулки. Малый зазор между кожухом и маховиком заполнен вязкой жидкостью /1/.
Демпфирующий эффект в поглотителе, показанном на рис. 4.28, б, создается при колебаниях жестко насаженной на вал 3 ступицы 1 с лопатками, прокручивающейся относительно маховика 2. Внтуренние камеры заполнены жидкостью с большой вязкостью /1/.
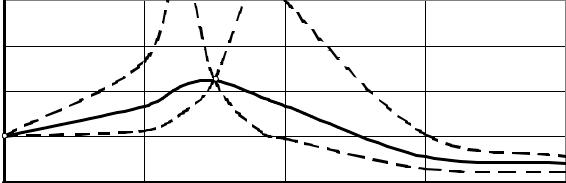
|a|/ |
|
|
|
|
|
4 |
0= |
|
0=0 |
|
|
|
|
|
|
||
3 |
|
|
|
|
|
2 |
|
В |
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|
0,6 |
0,8 |
1 |
1,2 |
1,4 |
|
|
Рис. 4.29. Амплитудно-частотная характеристика поглотителя колебаний |
|
|||
В поглотителе (рис. 4.28, в) ведущий вал 3 вращает полумуфту 1, имеющую торообразную полость с внутренними перегородками 6 и скрепленный с ней кожух 2, свободно прокручивающийся относительно аналогичной второй полумуфты 4, жестко соединенной с ведомым валом 5. Жидкость небольшой вязкости заполняет пространство между полумуфтами. Вследствие разности скоростей ведомого и ведущего валов под действием разности центробежных сил осуществляется круговая циркуляция жидкости в направлении, показанном на рисунке стрелками. Возникающие при этом кориолисовы силы осуществляют передачу крутящего момента /1/.
Демпфирующая сила в поглотителе (рис. 4.28, г) возникает при перетекании масла через малые отверстия при колебаниях диафрагмы 1 относительно заполненного маслом и свободно насаженного кожуха /1/.
4.7.Ударные гасители колебаний
Впоследние годы начинают получать распространение нелинейные гасители колебаний, и в частности ударные гасители колебаний.
Нелинейный гаситель колебаний не может осуществить полную
компенсацию |
колебаний при моногармоническом |
возбуждении |
х0(t)= 0( )ei t, |
и речь может идти только об их частичном подавлении. |
|
Уменьшая колебания на частоте внешнего воздействия, нелинейный гаситель возбуждает вместе с тем высокочастотные колебания системы. Эту особенность нелинейного динамического гашения следует иметь в виду в основном при использовании гасителей существенно нелинейного типа, например ударных /1/.
Для оценки эффективности нелинейных динамических гасителей колебаний помимо информации о динамической податливости или жесткости демпфируемых элементов необходимо знать уровень их колебаний до установки гасителей колебаний. Таким образом, в случае экспериментального определения характеристик демпфируемой системы нужно произвести соответствующие измерения колебаний в условиях нормального функционирования объекта /1/.
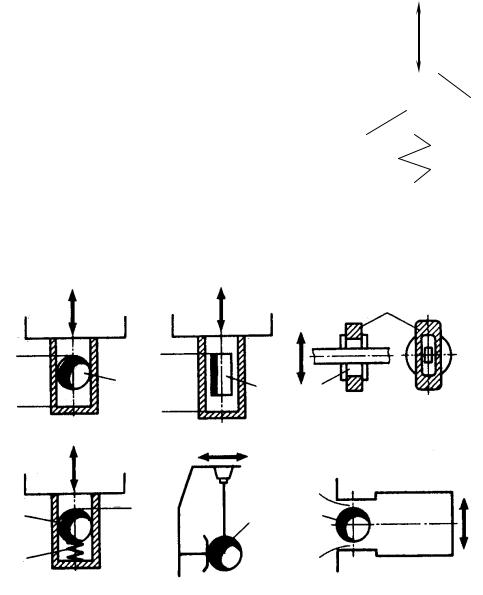
Основу ударного гасителя колебаний |
|
|
|
|
|
|
0( )ei t |
|
. |
|||||
составляет тело массой mг (рис. 4.30), |
|
|
|
|
|
|
|
|||||||
|
|
|
||||||||||||
соударяющееся |
с |
элементом |
А |
|
|
|
|
|
|
|
|
|
||
демпфируемой |
системы, |
колебания |
|
|
|
|
|
|
|
|
|
|||
которого |
|
следует |
уменьшить. |
|
|
|
|
|
|
А |
||||
|
|
|
|
|
|
|
||||||||
Наибольшее |
распространение получили |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||||
плавающие ударные гасители колебаний |
|
|
mг |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||
(рис. 4.31, а, б, в), выполненные в виде |
|
|
|
|
|
|
|
|
|
|||||
шара, цилиндра, кольца, установленного |
|
|
|
|
|
|
|
|
|
|||||
свободно с зазором 2 . Плавающие |
|
|
|
|
|
|
|
|
|
|||||
гасители колебаний |
настраивают |
на |
|
|
Рис. 4.30. Расчетная схема |
|||||||||
режим двух |
поочередных |
соударений |
|
|
ударного гасителя колебаний |
|||||||||
a) |
|
|
б) |
|
|
|
в) |
mг |
||||||
|
|
|
0( )ei t |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mг |
|
mг |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
д) |
|
|
|
е) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
mг |
|
|
mг |
mг |
|
|
сг |
|||||||
|
|
|
|
|
|
|||||||||
сг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.31. Схемы ударных гасителей колебаний
тела о каждый ограничитель за период движения, дающий для таких устройств наибольший эффект. Наряду с этим используют пружинные (см. рис. 4.31, г) и маятниковые (см. рис. 4.31, д) ударные гасители колебаний с соответствующей подвеской гасителя. В таких устройствах реализуют, как
правило, режим односторонних соударений с одним ударом за период. Реже применяют аналогичные устройства двустороннего действия (см.
рис. 4.31, е) /1/.
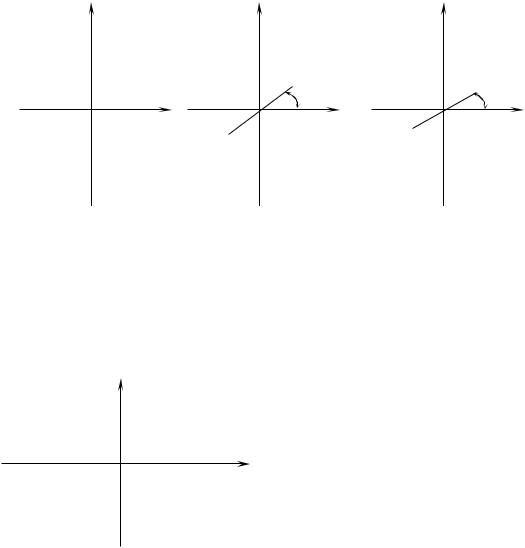
На рис. 4.32 приведены статические упругие характеристики f(y) перемещения гасителя относительно деформируемой точки А объекта (см. рис. 4.30) для основных вариантов установки гасителей колебаний (а – плавающий гаситель колебаний; б – пружинный односторонний гаситель; в – пружинный двусторонний гаситель колебаний) /1/.
f(y) |
|
|
f(y) |
|
|
f(y) |
|
|
||
|
|
|
|
|
arctg cг |
|
|
|
|
arctg cг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
0 y |
0 y |
- |
|
0 |
y |
|||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
б) |
в) |
|
Рис. 4.32. Статические упругие характеристики ударных ГК |
|
||
Непосредственная |
гармоническая |
линеаризация |
описанных |
статических характеристик невозможна, поскольку их значения при ударе неоднозначны. Удобным приемом является гармоническая линеаризация обратных функций y=Q(R), характеризующих зависимость относительного смещения от «упругой» реакции
у |
гасителя. |
Например, |
для |
гасителя |
|||||
|
колебаний плавающего |
типа |
(рис. |
||||||
|
|
|
|||||||
|
|
|
4.33) |
y= sgnR. |
Гармоническая |
||||
|
R |
линеаризация |
функций |
с |
помощью |
||||
|
обычных приемов дает y q(R0)R, где |
||||||||
|
|
q(R0) – коэффициент гармонической |
|||||||
|
|||||||||
|
|
|
линеаризации, |
|
зависящий |
от |
|||
|
|
|
амплитуды R0 |
периодической реакции |
|||||
|
|
|
гасителя, причем q=cг-1. |
|
|
|
|||
Рис. 4.33. Статическая упругая |
Известна зависимость 0( ), для |
||||||||
характеристика ударного гасителя |
которой плавающий ударный гаситель |
||||||||
колебаний плавающего типа |
обеспечивает |
полное |
подавление |
||||||
основного тона колебаний в широком
диапазоне частот возмущения /1/: