Материал: 1466
m .
сг, bг
Рис. 4.19. Резинометаллическая опора с гасителем колебаний
4.5.5.Инерционные динамические гасители
сактивными элементами
Значительно расширить функциональные свойства динамического гашения колебаний позволяет введение в их состав активных элементов, использование которых позволяет осуществлять настройку параметров гашения под изменяющиеся параметры внешних возмущений в широком диапазоне частот, отыскивать и реализовывать наилучшие законы для компенсации реакций /1/.
При гашении моногармонических колебаний активные элементы позволяют регулировать параметры динамического гасителя с целью обеспечения равенства частоты возбуждения и парциальной частоты гасителя
= г . |
(4.57) |
В качестве активного элемента могут использоваться электромагниты, позволяющие регулировать эквивалентную жесткость динамического гасителя колебаний (рис. 4.20).
F(t)  с
с
m

 сгэ
сгэ



 mг
mг
Рис. 4.20. Инерционный динамический гаситель с электромагнитом
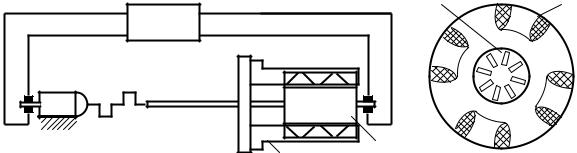
В роли исполнительного элемента в системе динамического гашения крутильных колебаний удобно использовать модифицированную конструкцию двигателя постоянного тока. Для этого в двигателе (рис. 4.21) необходимо устранить относительный сдвиг полюсов ротора 1 и статора 2 и ликвидировать возможность переключения полюсов при колебаниях /1/.
При относительных смещениях элементов описанных выше электромеханических устройств, силовое взаимодействие носит квазиупругий характер.
Коэффициент эквивалентной упругости можно определить по формуле /1/
сгэ = k I2, |
(4.58) |
где I – сила тока в обмотках; k – постоянная, которая зависит от свойств магнитопроводов и обмоток.
а) |
б) |
2 |
|
1 |
> |
N |
|
S |
J |
S N |
c |
cг |
Jг |
N |
S |
|
|
S |
|
|
|
|
|
|
|
|
|
|
N |
|
|
2 |
cгэ |
1 |
|
Рис. 4.21. Управляемый динамический гаситель крутильных колебаний
Соотношение (4.58) примет вид /1/: |
|
для продольных колебаний |
|
сгэ = mг 2 ; |
(4.59) |
для крутильных колебаний |
|
сгэ = Jг 2 . |
(4.60) |
Как видно из полученных выражений (4.59) и (4.60), удобно регулировать эквивалентную упругость подвеса электромеханического гасителя путем изменения силы тока в обмотках пропорционально частоте возбуждения.
Другим способом изменения параметров гасителя может быть перемещение массы динамического гасителя 1 вдоль упругой балки с помощью регулируемого электродвигателя (рис. 4.22). Для выполнения режима наилучшего динамического гашения необходимо, чтобы фазы колебаний объекта 2 и гасителя 1 были сдвинуты на угол /2. Фазовый дискриминатор 4 (см. рис. 4.22, б) сравнивает показания датчиков 5 абсолютных перемещений объекта и гасителя и вырабатывает управляющий сигнал, который передается на реле 3 включения электродвигателя в соответствии с необходимым направлением компенсирующей настройки /1/.

1 |
3 |
mг |
а) |
|
2 |
сг |
|
|
|
m |
|
б) |
5 |
|
|
|
> |
||
1 |
3 |
||
|
|||
|
mг |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|||||
2 |
|
|
cг |
|
|
|
|
|
|
|
|
|
|
|
> |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Рис. 4.22. Активный динамический гаситель |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Инерционность |
системы |
3 |
2 |
|
|
||||||||||||||||||||||||||||
управления |
накладывает |
свои |
|
|
|||||||||||||||||||||||||||||
ограничения |
|
на |
эффективность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
активного динамического |
гаше- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
ния. Снизить массу присоеди- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
ненных к объекту частей возмож- |
|
|
|
|
|
> |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
но, если разместить корпус 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
исполнительного |
|
|
|
|
|
устройства |
Рис. 4.23. Активный динамический гаситель, |
||||||||||||||||||||||||||
активного гасителя (рис. 4.23) на |
установленный на неподвижном основании |
||||||||||||||||||||||||||||||||
неподвижном основании. В этом |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
случае передают силовое воздействие на какие-либо точки упругого объекта 2 по результатам измерения колебаний других точек (например, 3), вибрацию которых следует погасить /1/.
4.5.6. Гироскопические гасители колебаний
При гашении колебаний движущихся объектов, например транспортных средств, неподвижная система, относительно которой вырабатываются компенсирующие силы, действующие на объект, может быть реализована с помощью гироскопических устройств /1/.

Подобные системы действуют аналогично пружинному гасителю с трением, но устройство и принцип действия отличны. В качестве примера
|
|
|
на рис. 4.24 показана схема |
||||
2 1 |
J0 |
|
успокоителя |
бортовой |
качки |
||
|
судов. Ротор гироскопа 1 |
||||||
|
2 |
|
|||||
|
3 |
1 |
смонтирован |
в |
кожухе |
2, |
|
|
который может качаться отно- |
||||||
|
|
||||||
|
|
|
сительно судна вокруг оси 3, |
||||
|
|
|
перпендикулярной оси |
прецес- |
|||
|
P |
|
сии. Центр тяжести кожуха |
||||
|
|
располагается ниже оси кача- |
|||||
|
г |
|
ний на расстоянии |
. |
В роли |
||
4 |
|
|
демпфера используется |
тор- |
|||
|
|
||||||
|
Рис. 4.24. Схема успокоителя |
|
мозной барабан 4. Обычно |
||||
|
|
масса ротора составляет около |
|||||
|
бортовой качки судов |
|
1% от массы судна /1/. |
|
|
||
|
|
|
|
|
|||
Ротор приводится во вращение с помощью двигателя с максимально допустимой угловой скоростью max. Система дифференциальных уравнений для малых колебаний имеет вид /1/:
|
|
|
|
|
|
M(t) ; |
|
|
J c J0 max г |
|
|||||
J |
|
bг |
|
G г |
J |
|
(4.61) |
г г |
г |
0 max 0, |
|||||
где J, J0, Jг – моменты инерции соответственно судна относительно продольной оси, ротора и гасителя относительно поперечной оси; G – сила тяжести кожуха; г – угол поворота кожуха; bг – коэффициент вязкого трения; с – остойчивость судна; M(t)=M0ei t – момент внешних сил, зависящий от волнения моря.
Для гашения бортовой качки судна применяется также гироскопическая система с обратной связью. Исполнительный гироскоп (рис. 4.25, а) установлен таким образом, чтобы ось 3 кожуха 2 была расположена концентрично оси прецессии /1/.
Серводвигатель 4 через зубчатую передачу 5 осуществляет повороты кожуха с помощью сигналов малого направляющего гироскопа (см. рис. 4.25, б).
Направляющий гироскоп представляет собой сильно уменьшенную копию исполнительного гироскопа и устанавливается аналогично. Во время бортовой качки в результате поворота кожуха направляющего гироскопа замыкаются соответствующие контакты реле, включающего серводвигатель. Кожух исполнительного гироскопа поворачивается таким образом, что возникающий реактивный момент, действующий на опоры кожуха, противодействует качке /1/.

В современных судах для подавления качки применяют управляемые или неподвижные крылья, которые меняют угол атаки при крене таким образом, чтобы при обтекании их водой возникала подъемная сила, противодействующая качке. Такие устройства осуществляют стабилизацию, в отличии от гироскопических, лишь при движении судна /1/.
а) |
2 |
б) |
1 |
3 |
5
4
Рис. 4.25. Схема успокоителя бортовой качки судов с обратной связью: а – основной гироскоп; б – малый направляющий гироскоп
4.6. Поглотители колебаний
Поглотителями колебаний принято называть динамические гасители диссипативного типа. В отличии от динамических гасителей с трением поглотители колебаний эффективно работают в более широком частотном диапазоне.
4.6.1. Поглотители колебаний с сухим трением
Широкое распространение поглотители колебаний с сухим трением нашли благодаря простоте своей конструкции, малой массе и простоте обслуживания. Их применяют для гашения как крутильных, так и продольных колебаний. Рассмотрим для примера работу поглотителя крутильных колебаний объекта с одной степенью свободы (рис. 4.26). Диск с моментом инерции Jг присоединен к объекту с помощью пары сухого трения, создающей при относительных колебаниях постоянный момент величиной , противодействующий относительному смещению объекта и поглотителя /1/.
Дифференциальные уравнения системы имеют вид /1/:
J sgn( г ) c M0ei t ;
J |
|
|
|
(4.62) |
г г |
sgn( г ) 0. |
|||
Максимальное рассеивание энергии за цикл происходит при величине момента сил сухого трения, равной /1/
|
2 |
Jг 2 max, |
(4.63) |
|
|||
|
|
|
|