Материал: 1466
ускорения W (перегрузка) объекта. Величины Х0’ и W можно определить по формулам /1/:
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||
X0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
. |
(4.38) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|||||||||
|
|
|
m ( 2 |
2)2 |
|
2 |
|
|||||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
m2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
2 |
|
4 |
|
b2 |
2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
0 |
|
|
0 |
|
|
m2 |
|
|
|
|
|
|
|
|
|||||||||
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
(4.39) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
2 |
|
2 |
|
2 |
|
|
b2 |
|
|
2 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
( 0 |
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
m2 |
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Для количественной оценки качества виброзащитной системы используют безразмерные коэффициенты эффективности: kR – коэффициент виброизоляции и kX – коэффициент динамичности. При силовом возбуждении системы коэффициенты эффективности определяют по формулам /1/:
k |
R |
|
R0 |
; k |
X |
|
cX0 |
. |
(4.40) |
|
|
||||||||||
F |
||||||||||
|
|
|
|
F |
|
|||||
|
|
0 |
|
|
0 |
|
|
|||
При кинематическом возбуждении коэффициенты эффективности будут равны /1/:
kR |
W |
; kX |
|
X0 |
. |
(4.41) |
2 0 |
|
|||||
|
|
|
0 |
|
||
4.5. Динамические гасители колебаний
Вибрационное состояние объекта виброзащиты изменяется путем присоединения к нему дополнительных устройств, формирующих силовые воздействия. Выбором упругоинерциальных свойств системы добиваются того, чтобы присоединяемое устройство входило в резонанс, тем самым уменьшая колебания объекта виброзащиты. Такие устройства называют инерционными динамическими гасителями. Эффективно использовать динамические инерционные гасители для подавления узкополосных колебаний.
Динамическое гашение используется для подавления всех видов колебаний: продольных, изгибных, крутильных и т.д. /1/.
Рассмотрим основные типы инерционных динамических гасителей колебаний.
4.5.1. Пружинный одномассовый инерционный динамический гаситель
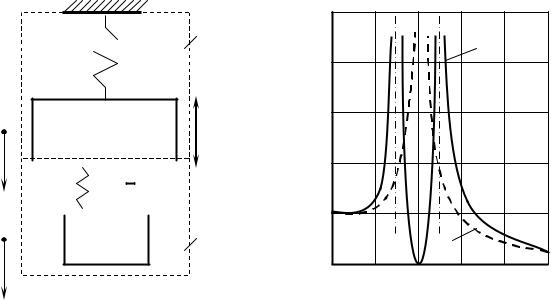
В качестве примера на рис. 4.7 представлен простейший одномассовый инерционный динамический гаситель. Объект виброзащиты 1 с сосредоточенной массой m прикреплен к основанию пружиной с жесткостью с, имеющей линейную упругую характеристику. Возбуждение колебаний происходит за счет периодической силы F(t) = F0ei t.
1
 c
c
m |
. F(t) = F0ei t |
q
|
|
|
|
|
|
|
сг |
|
|
bг |
|||
|
|
|||||
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mг 2
qг
Рис. 4.7. Схема одномассового инерционного динамического гасителя
|аг| /
1
4
3
2
1
 2
2 0 0,5 1,0 1,5 / г 2,5
0 0,5 1,0 1,5 / г 2,5
Рис. 4.8. АЧХ:
1 – системы с гасителем колебаний;
2 – демпфируемый объект
Для уменьшения колебаний к объекту 1 присоединен через упруговязкую подвеску с жесткостью сг и коэффициентом вязкости bг динамический гаситель 2 массой mг. Уравнения продольных колебаний системы с динамическим гасителем в дифференциальной форме имеют вид
/1/:
mq bг (q qг ) cq cг (q qг ) F0ei t ;
|
|
|
(qг |
q) 0, |
(4.42) |
mгqг |
bг (qг |
q) cг |
где q,q,q,qг,qг ,qг – абсолютные координаты перемещений масс, их скорости и ускорения.
Решение системы уравнений (4.42) можно представить в виде /1/
q(t) aei t ; qг (t) aг ei t , |
(4.43) |
где а, аг – амплитуды колебаний объекта и гасителя соответственно.
В работе /1/ показано, что «остаточные» колебания объекта пропорциональны потерям в гасителе при настройке парциальной частоты упругих колебаний гасителя г на частоту внешнего возбуждения .
| a| |
|
|
2 г |
|
, |
(4.44) |
|
|
|
|
|||
|
|
 2 4 4 2г[1 2(1 )]2
2 4 4 2г[1 2(1 )]2
где |
F0 |
; |
г |
|
bг |
; |
mг |
; |
|
|
. |
|
|
c |
|
b |
|
m |
|
|
0 |
|
|||
|
|
|
|
0 |
|
|
|
|
|
|
||
Как видно из формулы (4.44), при указанной настройке при г 0 амплитуда колебаний объекта | a| 0, т.е. колебания объекта полностью устраняются.
На рис. 4.8 /1/ показаны амплитудно-частотные характеристики (АЧХ) объекта и системы с гасителем. Из рисунка видно, что при выбранной настройке гаситель и объект образуют такую систему, имеющую две степени свободы, у которой на частоте возбуждения наблюдается антирезонанс. Частота антирезонанса также совпадает и с частотой резонанса исходной системы.
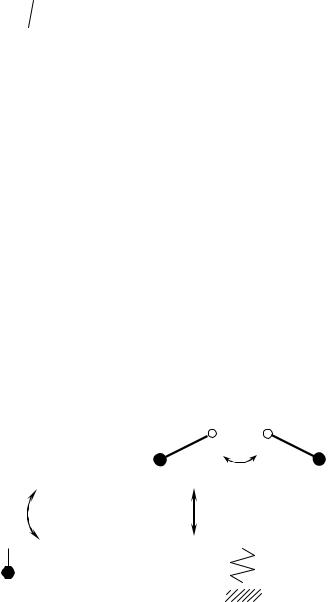
4.5.2. Маятниковые инерционные динамические гасители
Проводить гашение как угловых, так и продольных колебаний в более широком диапазоне позволяют маятниковые инерционные динамические гасители. Типовые схемы таких гасителей показаны на рис. 4.9.
а) |
б) |
|
|
|
|
|
|
|
mг |
||||||||
ДВС |
|
|
|
J |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
M(t) |
G(t) |
|
|
m |
|||||||||
|
|||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
с |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.9. Маятниковые инерционные динамические гасители колебаний: а – крутильных; б – продольных
Принцип действия маятникового гасителя рассмотрим на примере маятникового гасителя крутильных колебаний (рис. 4.10). К коленчатому валу двигателя внутреннего сгорания, совершающему вращение по закону
/1/
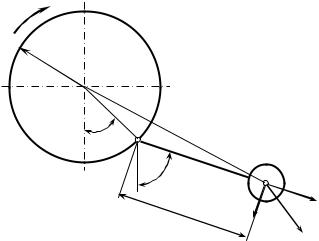
0(t) срt 0ei t , |
(4.45) |
где ср – средняя угловая скорость вала; 0 – показатель неравномерности вращения; – частота крутильных колебаний вала ( = n ср, где n=1, 2, …
– кратность колебаний),
упруго прикреплен диск радиусом r и моментом инерции J.
Крутильные колебания диска возбуждаются вибрационным моментом М(t) = с 0 ei t (с – крутильная жесткость участка вала). Для подавления колебаний к диску через невесомую нить шарнирно прикреплен маятник массой mг. Пусть система координат жестко соединена с диском и вращается с угловой скоростью ср. К центру масс маятника приложим центробежную силу F mг 2ср (где – расстояние от центра масс
маятника до центра вращения диска). Разложим
силу F на две составляющие: Fn и Fт,
направленные соответственно параллельно и перпендикулярно оси маятника /1/:
Fn mг ср2 cos ;
Fт mг ср2 sin . (4.46)
Из треугольника,
ОО1О2 (см. рис. |
4.10), с |
|||
учетом |
малости |
|
острых |
|
углов, найдем угол /1/: |
||||
|
|
r( г ) |
|
|
|
|
. |
(4.47) |
|
|
r 1 |
|||
M(t)
r
|
О |
|
J |
О2 |
1 |
|
г |
mг |
|
|
О1 Fn
Fт F
Рис. 4.10. Маятниковый гаситель крутильных колебаний
Поскольку колебания маятника малы, то формулы (4.46) примут вид
/1/:
|
Fn m |
2 (r |
1 |
); Fт |
m 2 |
r( |
г |
). |
|
(4.48) |
||
|
|
г |
ср |
|
г ср |
|
|
|
|
|
||
Уравнения, описывающие колебания рассматриваемой системы, |
||||||||||||
имеют вид /1/: |
|
|
|
|
2 |
|
|
|
|
i t |
|
|
|
|
|
|
|
1)( г ) 0e |
; |
|
|||||
J bг ( г ) c mг |
ср(r |
|
|
|||||||||
2 |
|
|
|
|
2 |
|
|
|
0. |
(4.49) |
||
mг 1 |
г bг ( г |
) mг срr 1( г ) mг r 1 |
||||||||||
Во втором уравнении системы переносное движение учитывается с помощью последнего члена, а кориолисовы силы не учитывались ввиду их малости. Парциальная собственная частота колебаний маятника будет равна /1/
г ср |
r |
|
|
|
r |
. |
(4.50) |
1 |
n |
|
|||||
|
|
1 |
|
||||
Как видно из формулы (4.50), парциальная собственная частота колебаний маятника пропорциональна угловой скорости вращения вала (частоте колебаний). Отсюда следует, что частота гасителя автоматически настраивается на частоту колебаний вала /1/.
Для компенсации изгибающего действия сил Fn при гашении крутильных колебаний целесообразно устанавливать в противоположных точках диска два маятника. Динамический эффект гашения колебаний в этом случае имеет суммарное действие /1/.
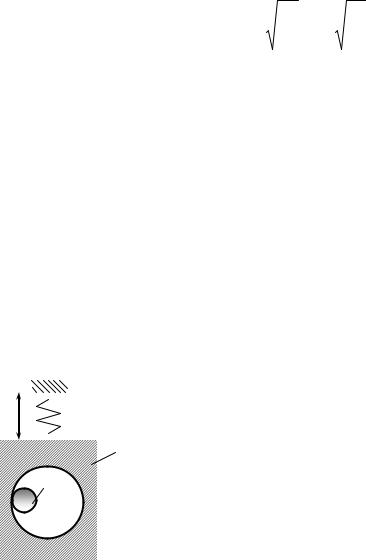
4.5.3. Катковые инерционные динамические гасители
Катковые инерционные динамические гасители имеют возможность подстраиваться под частоту возбуждения. Это достигается применением в их конструкции элементов, способных осуществлять обкатку замкнутых поверхностей. Движение обкатки в таких элементах синхронизируется с
|
|
|
|
|
|
|
|
внешним |
возбуждением |
и |
создает |
|||||||
|
|
|
|
|
|
|
|
|||||||||||
F(t) |
|
|
с |
|
периодическую |
реакцию |
на |
стороны |
||||||||||
|
|
|
вращающегося |
элемента, направленную в |
||||||||||||||
|
|
|
|
|
|
m |
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
противоположную |
внешней |
возбуждающей |
|||||||||
|
|
|
mг |
|
|
силе сторону /1/. |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Рассмотрим |
|
|
работу |
|
каткового |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
инерционного |
динамического |
гасителя, |
||||||||
|
|
|
|
|
|
|
|
изображенного на рис. 4.11. Демпфируемый |
||||||||||
|
|
|
|
|
|
|
|
объект массой m, имеющий одну степень |
||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
Рис. 4.11. Катковый |
|
свободы, снабжен шаровым или роликовым |
|||||||||||||||
|
|
гасителем массой mг |
и радиусом rг. Колебания |
|||||||||||||||
|
|
инерционный |
|
объекта |
вызываются |
периодической силой |
||||||||||||
динамический гаситель |
||||||||||||||||||
F(t)=F0cos( t + ). Данная система может быть |
||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
описана следующими дифференциальными уравнениями /1/: |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||
|
|
(m mг )q cq F0 cos( t ) (r rг )mг ( |
|
cos sin ); |
||||||||||||||
|
|
|
|
|
|
|
mг (r rг ) |
2 |
|
|
|
|
|
|
|
(4.51) |
||
|
|
|
|
|
|
|
|
mг (r rг )qsin , |
|
|
||||||||
где q – продольная координата объекта; – относительная угловая координата гасителя, отсчитываемая от вертикальной оси.