Материал: 1466
машины зависит от ее конструктивных особенностей, условий работы оператора, характера и интенсивности вибрационных воздействий.
Виброизолирующие настилы устраиваются на тех машинах, на которых оператор работает в положении стоя. Виброизолированные кабины устанавливаются на мобильных машинах, в первую очередь с целью снижения звуковой вибрации, но при этом обеспечивают снижение вибрации, воздействующей на оператора /8/.
Кроме перечисленных способов защиты человека-оператора от динамических воздействий на мобильных машинах применяется упруговязкая подвеска кресла человека-оператора, которая может иметь как различное конструктивное исполнение, так и параметры упруговязких связей /8/.
2.УРАВНОВЕШИВАНИЕ РОТОРОВ
2.1.Основные понятия
Ротором в теории уравновешивания (балансировки) называется любое вращающееся тело. Ротором являются коленчатый вал двигателя, якорь электродвигателя, шкивы, маховики и т.п. /13/.
Как известно из курса теоретической механики, давление вращающегося тела на его опоры в общем случае складывается из двух составляющих: статической и динамической. Возникновение статической составляющей обуславливается действием сил тяжести, возникновение динамической составляющей – ускоренным движением материальных частиц, из которых состоит ротор. Если динамическая составляющая не равна нулю, то ротор называется неуравновешенным /13/.
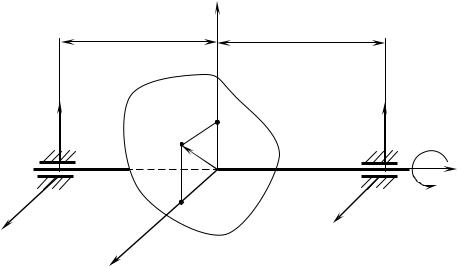
Рассмотрим ротор, установленный на двух опорах А и В (рис.2.1). Плоскость ОХУ проходит через центр масс S ротора, а вся система координат ОХУZ вращается вместе с ротором.
Х
a b
ХА |
хS |
|
ХВ |
|
S |
rS |
|
B |
|
A |
O |
|
Z |
|
|
|
|||
УА |
уS |
УВ |
=const |
|
|
||||
|
|
|||
У
Рис. 2.1. Расчетная схема ротора
При равномерном вращении ротора вокруг оси Z (см. рис. 2.1), проекции динамической составляющей определяются следующим образом:
ХА + ХВ = ФХ; |
УА + УВ = ФУ; |
|
- ХА а + ХВ b = МФх; |
УА а - УВ b = МФу . |
(2.1) |
Как видно из представленных формул, неуравновешенность можно численно оценить посредством проекций главного вектора Ф и главного

момента МФ центробежных сил инерции ротора.
Проекции определяются по следующим формулам /13/: |
|
||
ФХ= m 2 хS; |
|
ФУ= m 2 уS; |
|
МФх= – JУZ 2 |
; |
МФу= – JХZ 2 , |
(2.2) |
где m – масса ротора; хS, уS – |
координаты центра масс |
S ротора; |
|
JУZ , JХZ – центробежные моменты инерции ротора относительно координат
ОХУZ (см. рис. 2.1).
Следует отметить, что в рассматриваемой задаче момент сил инерции ротора МФ есть величина векторная /13/.
Как видно из уравнений (2.1), неуравновешенность ротора возрастает пропорционально квадрату его угловой скорости. Поэтому если быстроходные роторы (рабочие колеса турбин, коленчатые валы двигателей внутреннего сгорания и т.п.) не уравновешены, то они оказывают на свои опоры динамическое давление, вызывающее вибрацию стойки (станины) и ее основания /13/.
Это можно пояснить следующим числовым примером. Пусть масса ротора m=10 кг, постоянная угловая скорость =1000 рад/с, смещение центра масс от оси вращения хS =0,0001 м. Модуль силы инерции Ф определим по формуле (2.2).
ФХ = m 2 хS =10 10002 0,0001 = 1000 Н.
Как видно из полученных значений, даже при небольшом смещении центра масс от оси вращения ротора сила инерции превышает силу тяжести в 10 раз, а следовательно, возрастают и реакции в опорах /11/.
Устранение этого вредного воздействия называют уравновешиванием (балансировкой) ротора. Решение данной задачи относится к динамическому проектированию машин /13/.
Согласно уравнениям (2.2) модуль главного вектора центробежных сил инерции ротора будет равен /13/
Ф 2m xs2 уs2 . |
(2.3) |
В векторном виде формула (2.3) примет вид |
|
Ф 2mr . |
(2.4) |
S |
|
Вектор |
|
D mrS |
(2.5) |

называют главным вектором дисбалансов ротора /13/.
Согласно уравнениям (2.2) модуль главного момента центробежных сил инерции ротора будет равен /13/
|
MФ 2 Jх2z Jу2z 2MD , |
(2.6) |
||
где |
MD |
Jх2z Jу2z |
|
(2.7) |
Величина MD называется главным моментом дисбалансов ротора. В векторном виде имеем:
MФ 2MD . |
(2.8) |
Для количественной оценки неуравновешенности ротора используют главный вектор D и главный момент MD дисбалансов ротора.
2.2. Виды неуравновешенности роторов
Различают следующие виды неуравновешенности роторов: статическую, моментальную и динамическую /1/.
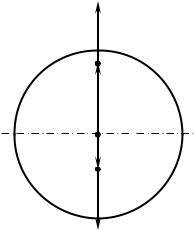
Статически неуравновешенным называется ротор (рис. 2.2), центр масс S которого не находится на оси вращения, но главная центральная ось инерции (I–I) параллельна оси вращения. При этом rS 0, JXZ=JУZ=0. Таким образом, статическая неуравновешенность, согласно уравнениям (2.5) и (2.7), выражается только главным вектором дисбалансов D, при этом главный момент дисбалансов MD=0. Вектор D направлен радиально и вращается вместе с ротором. Примером такого ротора может служить коленчатый вал одноцилиндрового двигателя внутреннего сгорания. Опоры А и В нагружены силами FA и FB , векторы которых вращаются вместе с валом /1/.
FB |
М |
|
N |
FA |
В |
I |
rS |
S |
А I |
D
Рис. 2.2. Статически неуравновешенный ротор
Статическую неуравновешенность легко обнаружить статическими
испытаниями. Ротор цилиндрической формы устанавливают на два горизонтальных ножа (бруска). Если центр масс расположен вне оси цилиндра, то ротор будет поворачиваться, пока не займет положения устойчивого равновесия, при этом центр масс звена займет низшее положение /11/.
Устранить статическую неуравновешенность можно, если к ротору прикрепить дополнительную массу mк, называемую корректирующей. Ее необходимо разместить так, чтобы
|
|
Dк mкrк D. |
|
(2.8) |
|
Центр корректирующей массы должен находиться на линии действия |
|||||
OS вектора |
D (рис. 2.3), |
а вектор |
rк должен быть направлен в сторону, |
||
противоположную вектору rS . |
|
|
|
||
Иногда |
установку |
корректирующей |
|
Dк |
|
массы заменяют удалением массы mк. В этом |
|
||||
случае центр удаленной массы и центр масс |
|
|
|||
|
|
||||
звена располагаются по одну сторону от оси |
mк |
r |
|||
вращения (точки О). |
|
|
|
к |
|
|
|
|
|
||
Однако |
статическую |
балансировку не |
|
O |
|
всегда удается выполнить с помощью одной |
|
||||
|
rS |
||||
корректирующей массы. Например, для |
m |
||||
коленчатого |
вала |
одноцилиндрового |
S |
||
двигателя внутреннего сгорания (см. рис. 2.2) |
|
|
|||
необходимо |
использовать |
две |
|
D |
|
|
|||||
корректирующие массы в плоскостях M и N |
|
||||
|
|
||||
(плоскостях |
коррекции), |
поскольку |
Рис. 2.3. Схема размещения mк |
||
пространство между этими плоскостями |
|
|
|||
должно быть свободным для движения шатуна. В этом случае вектор Dк должен быть равен сумме дисбалансов от двух корректирующих масс. Таким образом, число и расположение плоскостей коррекции выбирается в соответствии с конструкцией и назначением ротора /13/.
Моментально неуравновешенным называется ротор, центр масс S
которого находится на оси вращения, а главная центральная ось инерции I
– I ротора (рис. 2.4) наклонена к оси вращения ротора под углом . При этом rS=0, JXZ 0, JУZ 0. Таким образом, моментальная неуравновешенность выражается только главным моментом MD дисбалансов, т.е. парой дисбалансов DМ1 и DМ 2 , которая вращается вместе с ротором. Примером моментально неуравновешенного ротора может служить двухколенчатый вал двигателя. Главный момент дисбалансов такого вала равен