Материал: 1466
MD=DМ1 h1. |
Опоры А и В нагружены парой сил |
FA и FB , векторы |
||||||||||||||||
которых вращаются вместе с валом /13/. |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
DМ1 |
|
I |
||||||
|
|
|
FB |
М |
||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|||||
В |
|
|
|
S |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FA |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
h1 |
|
N |
|||
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
DМ 2 |
|
|
|
|
|
||||
|
|
|
|
|
|
DМ1= - DМ 2 |
|
|
|
|
|
|||||||
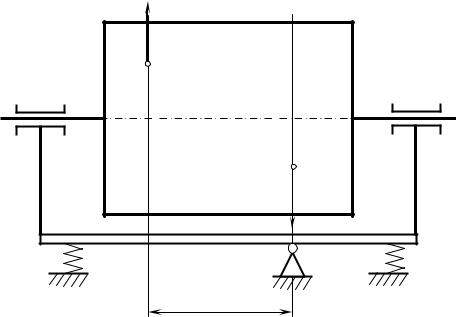
Рис. 2.4. Моментально неуравновешенный ротор
Моментальную неуравновешенность можно устранить, если использовать не менее чем две корректирующие массы, поскольку пару сил можно уравновесить только парой. Расположение корректирующих масс в плоскостях коррекции и их величины должны быть такими, чтобы дисбалансы корректирующих масс составили именно пару. Моменты корректирующих масс и моменты дисбалансов должны быть равны и
противоположно |
направлены, |
т.е. |
MD MDк . |
Для |
ротора, |
|
изображенного на рис. 2.4, |
момент MDк |
корректирующих масс должен |
||||
быть направлен |
по часовой |
стрелке, поскольку MD |
направлен |
против |
||
часовой стрелки. |
|
|
|
|
|
|
Динамически неуравновешенным называется ротор, у которого центр масс находится вне оси вращения и ось инерции наклонена к оси вращения, т.е. rS 0, JXZ 0, JУZ 0. Динамическая неуравновешенность выражается через D и MD. Как известно из курса теоретической механики, данная неуравновешенность может быть выражена двумя скрещивающимися векторами дисбалансов D1 и D2, расположенными в двух плоскостях перпендикулярных оси вращения и вращающихся вместе с ротором. Динамическая неуравновешенность может быть устранена двумя корректирующими массами, расположенными в плоскостях коррекции /1/.
Таким образом, устранение любой неуравновешенности: статической, моментальной и динамической – проводится путем совмещения главной

центральной оси инерции с осью вращения ротора, т.е. D= 0 и MD= 0. В случае выполнения этого условия ротор называется полностью сбалансированным. Причем, если ротор полностью сбалансирован для конкретной угловой скорости, то он будет полностью сбалансирован и для любой другой угловой скорости, как постоянной, так и переменной /13/.
2.3. Динамическая балансировка роторов при проектировании
Если условия эксплуатации машины (механизма) требуют использования полностью уравновешенного ротора, а конструктивно ротор не уравновешен, то балансировку такого ротора необходимо применять уже на стадии проектирования.
В качестве примера рассмотрим ротор (рис. 2.5), составленный из нескольких деталей: 1, 2, 3, вращающихся как единое целое. Массы деталей mi, координаты центров масс S: ri, i и ai известны. Имея эти значения, необходимо определить дисбалансы неуравновешенных масс по формуле (2.5) /13/.
а) |
b1=l |
b3 |
Уa3
b2
|
|
a2 |
|
D |
kN |
a1=0 |
kM |
|
k N |
|
|
|
|
|
|
||
DkM |
D2 |
|
|
|
|
r2 |
r3 |
|
|||
|
|
S2 |
N |
||
|
|
|
|
S3 |
|
|
|
|
|
|
D3 |
z |
|
r1 |
|
2 |
|
|
S1 |
1 |
3 |
|
|
|
|
|
|
||
M |
|
D1 |
|
|
|
|
|
|
|
|
|
б) |
kM У |
|
|
в) |
|
|
|
|
|
D3N |
|
D1M |
DM |
|
D2N |
kN У |
|
D3M |
|
||||
|
|
|
|
|
|
D2M
DN
Рис. 2.5. Расчетная схема неуравновешенного ротора
Балансировка такой системы путем уравновешивания каждой массы отдельной корректирующей массой является нецелесообразной, поскольку в такой системе происходит частичное взаимное уравновешивание дисбалансов /13/.
Зададим две плоскости приведения M и N, перпендикулярные оси вращения z. Пусть плоскость М совпадает с деталью 1, а плоскость N расположена от нее на расстоянии l. К плоскостям M и N приведем дисбалансы D1, D2 и D3 неуравновешенных масс. Для этого заменим каждый из векторов дисбалансов двумя, параллельными ему и расположенными в плоскостях M и N. Для этого используем формулы /13/:
DiM=Di bi / l ; DiN = Di ai / l . |
(2.9) |
Для ротора, изображенного на рис. 2.5, получим: |
|
D1M = D1 b1 / l = D1 ; D2M = D2 b2 / l ; D3M = D3 b3 / l; |
|
D1N = D1 a1 / l = 0 , (a1 = 0) ; D2N = D2 a2 / l; D3N = D3 a3 / l . |
(2.10) |
После приведения пространственной системы дисбалансов D1, D2,
D3 были получены две плоские системы, расположенные в плоскостях М и N. Проведем сложение дисбалансов (см. рис.2.5, б,в) для каждой из плоскостей /13/:
|
3 |
|
|
|
|
DM DiM D1M D2M D3M ; |
|
||||
|
i 1 |
3 |
|
|
|
|
|
|
|
|
|
|
DN DiN |
D2N |
D3N . |
(2.11) |
|
i1
Врезультате неуравновешенность заданного ротора была представлена двумя скрещивающимися векторами дисбалансов DM и DM .
Таким образом, представленный на рис. 2.5 ротор может быть уравновешен двумя корректирующими массами. Если разместить корректирующие массы в плоскостях приведения М и N, то они будут являться одновременно и плоскостями коррекции /13/.
Условия полной балансировки данного ротора будут иметь вид
DkM DM ; Dk N DN . |
(2.12) |
Угловые координаты векторов корректирующих масс необходимо взять с плана дисбалансов (см. рис. 2.5, б, в). Сами корректирующие массы можно определить по формулам /13/:
mkM DkM /rkM ; |
mkN DkN /rkN , |
(2.13) |
где rkM и rkN – радиусы-векторы корректирующих масс, |
которые |
|
выбираются из конструктивных возможностей ротора.
Вместо корректирующих масс, при конструктивной возможности, можно убрать (например, высверлить) на линии действия векторов DkM и
Dk N в диаметрально противоположном направлении часть материала ротора, соответствующую корректирующим массам mkM и mkN /13/.
2.4. Балансировка изготовленных роторов
Даже полностью сбалансированный на стадии проектирования ротор после изготовления обладает некоторой неуравновешенностью, вследствии погрешности изготовления, неоднородности материала. Данная неуравновешенность определяется экспериментальным путем и устраняется на специальных балансировочных станках /1/.
Рассмотрим балансировку ротора на балансировочном станке рамного типа. Балансируемый ротор устанавливается на раме балансировочного станка (рис. 2.6) таким образом, чтобы одна из плоскостей коррекции совпадала с плоскостью, содержащей ось колебания рамы О (например, плоскость М). Измеренная при резонансе амплитуда колебаний рамы зависит в таком случае только от дисбаланса в плоскости коррекции N. Главный момент вынуждающей силы, относительно точки О, будет равен /11/
N |
M |
N |
М |
O |
l |
Рис. 2.6. Схема балансировочного станка рамного типа |

|
(2.14) |
M DNl 2 cos t , |
где l – расстояние между плоскостями коррекции; – угловая скорость вращения ротора.
Амплитуда вынужденных колебаний рамы будет пропорциональна амплитуде вынуждающего момента /11/
A kDNl 2 , |
(2.15) |
где k – коэффициент пропорциональности.
Проведем три испытания с измерением амплитуды вынужденных колебаний рамы для того, чтобы определить величину дисбаланса в плоскости N. При первом испытании определим амплитуду А1. При втором испытании установим в плоскости коррекции N в произвольном месте корректирующую массу с дисбалансом Dk , что соответствует
дополнительно силе инерции Фk . Суммарная сила инерции Ф2 ФN Фk даст амплитуду А2. После этого корректирующую массу переместим на 180 при том же значении rk и проведем третье испытание. Получим
а) |
|
|
б) |
d |
A3 |
c |
Ф |
|
Фk |
A |
A |
|
A |
2 |
k |
|
2 |
k |
|
|
|
|
|
b |
|
1 |
|
ФN |
Фk |
|
|
|
||
|
A |
|
|
|||
|
|
|
|
1 |
|
|
а
Ф3
Рис. 2.7. Планы сил и дисбанансов
амплитуду А3, соответствующую силе инерции Ф3 ФN Фk . Отложим силы инерции Ф1 и Ф2 (рис. 2.7).
Чтобы выполнялось условие Фk ФN , необходимо повернуть вектор силы инерции корректирующей массы Фk на угол k против часовой стрелки и изменить величину Dk /2/.
Для всех указанных выше сил инерции коэффициент пропорциональности одинаков. Поэтому можно рассматривать построение на рис. 2.7, а как геометрическое суммирование амплитуд /2/:
A2 A1 Ak ;