Материал: 1458
t1 > t0 -
xi0
[t0; t1] u = u[t0; t1].
. 2.3) :
x x1 , x2 ... |
xn T , |
(2.28) |
( ) |
|
|
u u1 ,u2 ... |
um T , |
(2.29) |
|
|
|
f f1,f2 ... |
fl T , |
(2.30) |
|
|
y y1 , y2 ... |
yk T . |
(2.31) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
x |
y |
||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
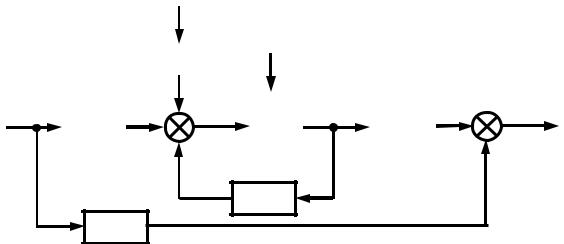
. 2.3.
x -
,
. -
n .
m , l , k n
-
1- :
25
x1 a11x1 a12 x2 ... a1n xn b11u b12u ... b1mu q11 f ... q1l f ; |
|
|||||||||||||||||||||||||
x |
|
a x a |
|
x |
... a |
|
|
x |
b u b |
|
|
u ... b |
|
|
u q |
21 |
f ... q |
2l |
f ; |
|||||||
2 |
21 1 |
|
22 2 |
|
|
2n n |
|
21 |
22 |
|
2 m |
|
|
|
|
|||||||||||
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
an1x1 |
an2 x2 ... ann xn bn1u bn2u ... bnmu qn1 f ... qnl f ; (2.32) |
|||||||||||||||||||||||
xn |
||||||||||||||||||||||||||
y |
|
c x |
c |
|
x ... c |
|
|
x |
n |
d |
u |
d |
|
u |
... d |
|
u; |
|
|
|
|
|||||
1 |
11 1 |
12 2 |
1n |
|
|
11 |
12 |
|
|
1m |
|
|
|
|
|
|
|
|||||||||
y |
|
c x |
c |
|
x |
... c |
|
|
x |
d u d |
|
|
|
u ... d |
|
|
|
u; |
|
|
|
|
||||
|
2 |
21 1 |
22 2 |
|
2n n |
|
21 |
|
22 |
|
2 m |
|
|
|
|
|
||||||||||
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
k |
c x |
c |
|
x |
... c |
|
x |
n |
d |
u d |
k 2 |
u ... d |
km |
u. |
|
|
|
|
|||||||
|
k1 1 |
k |
2 2 |
|
kn |
|
|
k1 |
|
|
|
|
|
|
|
|||||||||||
|
|
(2.32) - |
||||||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x Ax Bu Qf ; |
|
|
|
|
|
|
|
(2.33) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
y Cx Du, |
|
|
|
|
|
|
|
|
|||||||
– , – -
, Q – n l,
– , D –
m.
,
, (2.33) -
y
y C Ax Bu Qf Du , |
(2.34) |
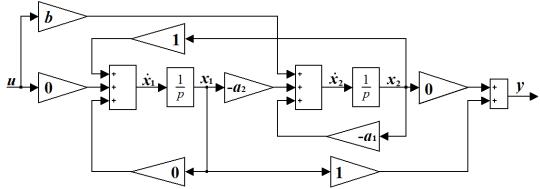
p |
|
. 2.4, x0 – -
.
Q D , ,
.
m = 1, k =1 n , ,, D, Q
a11 |
a12 |
... |
a1n |
b1 |
|
|
|
|
|
|
|
|||
a |
a |
... |
a |
|
|
b |
|
|
c |
c |
|
, D 0 |
,Q 0 . (2.35) |
|
A |
21 |
22 |
|
|
2n , B 2 |
, c |
n |
|||||||
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
||
|
|
an2 |
... |
|
|
|
|
|
|
|
|
|
|
|
an1 |
ann |
bn |
|
|
|
|
|
|
|
|||||
26
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(Q) |
|
|
|
|
x0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
u |
|
|
|
|
. |
|
|
|
x |
|
y |
|
+ |
|
1 |
|
|
||||||||
+ |
|
x |
|
|
||||||||
|
(B) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(C) |
|
|
|
+ |
|
|
|
p |
|
|
+ + |
||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(A)
(D)
. 2.4. ,
-
, ( -
) . -
z, -
z = Px, |
(2.36) |
– , n n,
, . . det P 0.
-
z Az Bu; |
||
|
|
|
|
|
(2.37) |
y Cz, |
|
|
|
|
|
1 |
; |
|
|
A PAP |
|
|
||
|
|
|
|
(2.38) |
|
B PB; |
|
|
|||
|
|
1 |
. |
|
|
C CP |
|
|
|
||
-
. -
. y
u .
27
-
, -
2- :
y a1 y a2 y bu |
(2.39) |
u – , y – , ai, b – -
.
(2.27),
, (n–1) y(i–1)
xi:
x1 y , x2 y |
(2.40) |
: |
|
x1 y x2 ; |
(2.41) |
x2 y bu a1 y a2 y bu a1x2 a2 x1 |
(2.42) |
-
(2.32)
x1 x2 ;
x2 a2 x1 a1x2 bu; (2.43)
y x1.
(2.43) :
|
0 |
|
1 |
|
0 |
|
|
|||
x |
|
a |
|
a |
x |
b |
u; |
(2.44) |
||
|
|
2 |
|
|
|
|||||
|
1 |
|
|
|||||||
|
|
|
0 |
x. |
|
|
|
|
|
|
y 1 |
|
|
|
|
|
|||||
(2.43), -
, . 2.5.
. 2.5.
28
-
, -
1- :
x1 x1 u; |
|
|
||
|
2x2 x3 5u; |
|
||
x2 |
(2.45) |
|||
x |
4x |
x |
4x ; |
|
3 |
1 |
2 |
3 |
|
y 2x |
x . |
|
|
|
|
2 |
3 |
|
|
(2.45):
|
|
1 0 0 |
1 |
|
|||||
|
|
|
0 |
2 1 |
|
|
5 |
|
|
x |
|
x |
|
u; |
(2.46) |
||||
|
|
|
4 |
1 4 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|||
y 0 2 1 x.
|
1 |
3 |
0 |
|
|
P |
|
6 |
0 |
|
(2.47) |
|
1 . |
||||
|
|
5 |
2 |
|
|
|
|
1 |
|
||
-
(2.46), (2.38).
-
MS Excel
:
( A) "= (A16:C18;A3:C5);( (A16:C18)))" "= (A16:C18;A8:A10)"
(C) "= (A13:C13; (A16:C18))"
:
( ) = {A3:C5}, (B) = {A8:A10}, (C) = {A13:C13}, (P) = {A16:C18}.
, ,
-
(
), F2,
Ctrl+Shift+Enter.
29