Материал: [SHipinsky_V.G.]_Oborudovanie_i_osnastka_upakovoch1(z-lib.org)
устройства размещено внутри блока управления 2 и соединено между собой электромонтажом.
В работу устройство включаются переводом тумблера SА1 в положение "ВКЛ", при этом загорается лампочка НL1 "СЕТЬ". Затем, в зависимости от материала и толщины свариваемых пленок, поворотом ключа переключатель SА2 устанавливается на требуемый режим сварки (I или II). Далее поворотом рукоятки реле времени КТ на соответствующее деление шкалы устанавливается предполагаемое время нагрева. После этого сложенные вместе соединяемые края пленок вводят в зазор между электронагревательными линейками, удерживаемых рукой клещей 3. Далее за счет нажатия пальцем руки на рычаг 24 электронагревательные линейки клещей смыкаются и зажимают между собой соединяемые пленки по линии сварного шва. При этом упор 30 подвижной пластины 9 в конце смыкания нажимает на кнопку микровыключателя SQ и его замкнувшиеся контакты включают цепь питания реле КV1, через замывающиеся контакты которого питание подается на реле времени КТ, реле КV2, лампочку НL2 "СВАРКА" и через трансформатор ТV на нагревательные элементы ЕK1 и ЕК2 клещей. Под действием импульса тока последние нагревают соединяемые части в зоне шва до требуемой температуры в течение заданного периода времени, по истечении которого срабатывает реле КТ и разрывает цепь питания реле КV2 и нагревательных элементов ЕК1 и ЕК2. При этом лампочка НL2 гаснет, а сварной шов вместе с нагревательными элементами охлаждается в течение 8 – 10 с. После этого рычаг 24 отпускается, подвижная электронагревательная линейка пружиной 28 возвращается в исходное положение, соединенные части изделия извлекаются из зазора между ними, и производится проверка качества выполненного сварного шва. При неудовлетворительном качестве режимы сварки поднастраиваются до оптимального значения, путем адекватного изменения величины и продолжительности подаваемого импульса электрического тока. Для получения шва большой длины соединяемые части пленок перемещаются в клещах на длину выполненного сварного шва и цикл повторяется. После окончания работы клещи выключаются переводом тумблера SА1 в положение "ВЫКЛ", при этом лампочка НL1 "СЕТЬ" гаснет.
Устройство сварки горячим воздухом применяется в автомате модели М1-ОФК, упаковывающем мягкий диетический творог в пленочные оболочки диаметром до 55 мм. Выполняется такая оболочка из рукава, сворачиваемого из полиэтиленовой рулонной ленты толщиной 0,08 – 0,15 мм и свариваемого непрерывным продольным швом со скоростью до 15 м/мин с помощью данного устройства, которое располагается на кронштейне 2 (рис.8.13), прикрепленном к каркасу 3 автомата винтами 4. При этом сварочное устройство 1 установлено на направляющих колонках 5 подвижной части 6 кронштейна с возможностью перемещения по ним за счет зубчатой реечной передачи, шестерня 7 которой располагается на оси вращающейся рукоятки 8. Требуемое же расстояние между устройством 1 и опорной планкой 9, на которой свариваются внахлестку соединяемые концы рукава 10, устанавливается вращением винта 11, упирающегося в подвижную часть 6 кронштейна, шарнирно закрепленную через ось 12 на его неподвижной части. При технологических остановках автомата работающее устройство 1 отводится в сторону путем поворота на 90о подвижной части 6 кронштейна за рукоятку 13.
146
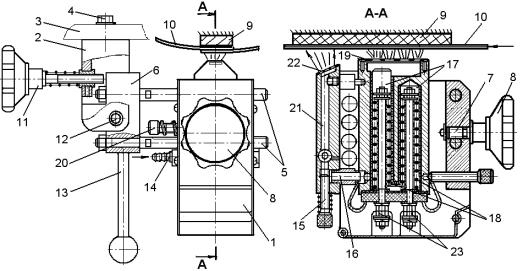
Рис. 8.13. Конструктивное исполнение устройства сварки горячим воздухом автомата модели М1-ОФК
Сжатый воздух подается в устройство 1 через штуцер 14 под давлением в пределах 0,05 – 0,1 МПа и разделяется в его каналах на два потока. При этом первый поток, регулируемый дроссельным винтом 15, через отверстие 16 поступает в нагревательную камеру, где в процессе движения по ее каналам 17 нагревается до заданной температуры от размещенных там спиральных элементов сопротивления 18. Далее этот поток через вертикальный ряд отверстий в пластине 19, являющейся соплом, направляется на сложенные внахлестку концы ленты, обеспечивая их непрерывное сваривание в рукав 10 на опорной планке 9. Второй же поток, регулируемый дроссельным винтом 20, по каналу 21 и отверстия в пластине 22 направляется к свариваемому шву, для его непрерывного охлаждения. Спиральные элементы сопротивления 18 выполняются из нихромовой проволоки и подключаются к источнику постоянного тока через клеммы 23. Температура же нагрева воздуха регулируется путем изменения питающего тока, при помощи соответствующего резистора, установленного в блоке управления, а о включении электронагревателя сигнализирует расположенная там же индикаторная лампочка. Перед началом работы включенный электронагреватель должен прогреваться в течение 3 – 5 мин, а отрегулировать его необходимо так, чтобы продольный сварной шов на рукаве 10 получался сплошным, непрерывным, ровным и прочным, без пережогов и недоваров.
147
ЛИТЕРАТУРА
1. Махаринский Е. И., Горохов В. А. Основы технологии машиностроения: Учебник. – Мн.: «Вышэйшая школа», 1997. – 423 с.
2.Шипинский В. Г. Упаковка и средства пакетирования: Учебное пособие. – Мн.: УП «Технопринт», 2004. – 416 с.
3.Бурляй Ю. В., Сухой Л. А., Колосова Т. М. и др. Классификационнономенклатурный справочник упаковочного оборудования для пищевых производств. – М.: Легкая и пищевая пром-сть, 1982. – 224 с.
4.Шаповалов Ю. Н. Упаковывание химической продукции. – Л.: Химия, 1983. – 128 с.
5.Ильин О. П., Козловский К. И., Петренко Ю. Н. Системы программного управления производственными установками и робототехническими комплексами: Учеб. пособие для вузов. – Мн.: «Вышэйшая школа», 1988.
–285с.
6.Попов Е.П., Письменный Г.В. Основы робототехники: Ведение в специальность: Учеб. для вузов по спец. «Робототехн. системы и комплексы»
–М.: «Высшая школа», 1990. – 224 с.
7.Бурляй Ю. В., Сухой Л. А. Оборудование для укладки и упаковки штучных изделий в тару. – М.: «Машиностроение», 1975. 280 с.
8.Орлов С. П. Дозирующие устройства. – М.: «Машиностроение», 1966. –
276 с.
9.Орлов С. П., Михайловский С. С., Тимофеев К. К. Весы и дозаторы. Справочник. – М.: «Машиностроение», 1972. – 328 с.
10.Зайчик Ц. Р. Технологическое оборудование винодельческих предприятий. – М.: «Агропромиздат», 1988. – 351 с.
11.Зенков Р. Л. Механика насыпных грузов. – М.: «Машиностроение»,
1964.
12.Карпин Е. Б. Расчет и конструирование весоизмерительных механизмов и дозаторов. – М.: «Машгиз», 1963. – 519 с.
13.Карпин Е. Б. Средства автоматизации для измерения и дозирование массы. – М.: «Машиностроение», 1971.
14.Чернов М. Е. Упаковка макаронных изделий. Учебное пособие. – М.: Издательский комплекс МГУП, 1997. – 130 с.
15.Ульянов В. Дозаторы для фасовки/ Журнал «Технологии переработки и упаковки», – Мн.: 2003 - №4. с.42 – 48.
16.А.с.1785955, СССР, МКИ В65В3/12. Устройство для дозирования жидких и пастообразных продуктов.
17. Современное оборудование для упаковки пищевых продуктов. Справочник./Под ред. Ю. В. Бурля и Л. А. Сухого. – М.: Пищевая промышленность, 1978. – 238 с.
18. Лебедовский М. С., Федотов А. И. Автоматизация сборочных работ.
– Л.: Лениздат, 1970. – 448 с.
19. Малов А. Н. Загрузочные устройства для металлорежущих станков.
– М.: «Машиностроение», 1972. – 400 с.
148
20. Автоматическая загрузка технологических машин: Справочник/И. С. Бляхеров, Г. М. Варьяш, А. А. Иванов и др.; Под общ. ред. И. А. Клусова. – М.: «Машиностроение», 1990. – 400 с.
21. Камышный Н. И. Автоматизация загрузки станков. – М.: «Машиностроение», 1977. – 288 с.
22. Иванов А. А. Проектирование систем автоматического манипулирования миниатюрными изделиями. – М.: «Машиностроение», 1981. – 271 с.
23. Шипинский В. Г. Робототехнологическое оборудование в холодноштамповочном производстве; обзорная информация (Серия ТС-9 «Технология приборостроения»). – М.: «ИНФОРМПРИБОР», 1989. Вып. 3.
– 48с.
24. А.с.1602683 СССР, МКИ В23Q7/08. Вибрационное загрузочное устройство.
25. Шипинский В. Г. Вибробункерное загрузочное устройство для плоских деталей./Журнал «Приборы и системы управления». – М.: 1989 - №2. с.41 – 42.
26. Капустин И. И., Ильинский Д. Я., Карелин Н. М. Устройства и механизмы автоматических сборочных машин. – М.: «Машиностроение», 1968.
– 280 с.
27. А.с.1206052 СССР, МКИ В23Q7/08. Ориентирующее устройство.
28. А.с.1294562 СССР, МКИ В23Q7/02. Устройство для ориентирования деталей.
29. А.с.1148756 СССР, МКИ В23Q7/08. Способ ориентации деталей и устройство для его осуществления.
30. А.с.1366352 СССР, МКИ В23Q7/08. Устройство для ориентирования деталей.
31. Линкевич П. П., Полис А. В. Автоматизация захвата и ориентации ферромагнитных деталей с использованием сил взаимодействия с источником магнитного поля: Обзор. – Рига: ЛатНИИНТИ, 1986. – 39 с.
32. А.с.730535 СССР, МКИ В23Q7/00. Способ бесконтактной магнитной
ориентации плоских ферромагнитных деталей. |
|
|
33. А.с.509396 СССР, МКИ В23Q7/00. Устройство |
для |
ориентации |
немагнитных токопроводящих деталей. |
|
|
34. А.с.1311820 СССР, МКИ В21D43/06. Устройство |
для поштучного |
|
отделения плоских заготовок из стопы и подачи их в рабочую зону. |
|
|
35. А.с.1296367 СССР, МКИ В23Q7/10. Устройство |
для подачи |
|
заготовок. |
|
|
36. А.с.1538966 СССР, МКИ В21D43/00. Робот к штамповочному прессу. 37. Манипуляционные системы роботов/ Под общ. ред. А. И.
Корендясева. – М.: «Машиностроение», 1989. – 472 с.
38. Семенов Е. И., Кравченко Н. Ф. Робототехнологические комплексы для листовой штамповки мелких деталей. – М.: «Машиностроение», 1989.
– 288с.
39. Воробьев Е. И., Козырев Ю. Г., Царенко В. И. Промышленные роботы агрегатно-модульного типа/ Под общ. ред. Е. П. Попова. – М.: «Машиностроение», 1988. – 240 с.
149
40. Проектирование и разработка промышленных роботов/ Под общ. ред. Я. А. Шифрина, П. Н. Белянина. – М.: «Машиностроение», 1989. – 272 с.
41. Вечтомова Д. Г., Жмылевская М. Л., Маслов В. А. Захваты промышленных роботов для машиностроения: Обзор, – М.: НИИмаш, 1984. – 48 с.
42. А.с.1024275 СССР, МКИ В25 J 15/06. Пневматический захват для плоских деталей.
43. А.с.447243 СССР, МКИ В23 G 7/04. Пневматический захват.
44. Бубнов В. А. Вихревые захватные устройства роботов и автоматических манипуляторов: Обзор. информ. (Сер.1, вып.9) – М.: ВНИИТЭМР, 1988. – 40 с.
45.А.с.1296407 СССР, МКИ В25 J 15/06. Электромагнитный схват.
46.А.с.1815221 СССР, МКИ В25 J 15/06, 19/00, 15/00 Электромагнитный
схват.
47.Абраров В. Н. Электростатические захватные устройства робототехники в приборостроении. /Экспресс-информация «Робототехника в приборостроении», выпуск 9. – М.: ЦНИИТЭИприборостроения, 1986.
48.А.с.891431 СССР, МКИ В25 J 15/00 Пневматический захват.
49.Шипинский В.Г. Автоматизация кассетирования плоских деталей / Журнал «Кузнечно-штамповочное производство», – М.: 1990, №5 с.6-8.
50. Шипинский В.Г., Каховский А. И. Упаковка для строительных материалов/ Журнал «Строительные материалы», – М.: 1999, №6 с.11-12.
51.А.с.1342672 СССР, МКИ B23Q 7/00 Устройство для ориентированной загрузки деталей в съемную кассету.
52.А.с.1348139 СССР, МКИ B23Q 7/08 Устройство для кассетирования плоских деталей.
53.А.с.1606414 СССР, МКИ B65G 59/00, 65/38 Устройство для поштучной выдачи изделий из бункера.
54.А.с.1618578 СССР, МКИ B23Q 7/10 Устройство для кассетирования плоских деталей.
55.Зенков Р. Л., Ивашков И. И., Колобов Л. Н. Машины непрерывного транспортирования. – М.: «Машиностроение», 1980.
56.Кузьмин А. В., Марон Ф. Л. Справочник по расчетам механизмов подъемно-транспортных машин. – Мн.: «Вышэйшая школа», 1983. – 350с.
57.Розен Г. М., Убрятов А. А., Петин А. А. Механизация и автоматизация листовой штамповки в автомобилестроении. – М.: «Машиностроение», 1983.
–327с.
58.Благодарский В. А., Зиновьева М. С., Хатунцева Н. С. Исполнительные механизмы машин-автоматов для упаковки изделий; справочник. – М.: «Машиностроение», 1980. – 302с.
59.А.с.891533 СССР, МКИ B65G 33/24 Винтовой конвейер.
60.А.с.1313630 СССР, МКИ B23Q7/00 Устройство для транспортирования и накопления ферромагнитных деталей.
61.Основы расчета и конструирования заверточных и укладочных автоматов. Под ред. Бройдо Б. Е. – М.: «Машиностроение», 1969. – 288с.
62.А.с.956243 СССР, МКИ B23 Q 41/02 Транспортное устройство автоматическое линии.
150