Материал: Сканирующая зондовая микроскопия
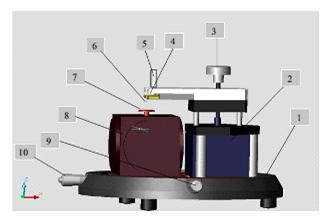
Рис. 37. Конструкция СЗМ NanoEducator:
- основание, 2 -
механизм подвода, 3 - винт ручного подвода,4 - датчик взаимодействия, 5 - винт
фиксации датчика, 6 - зонд, 7 - держатель образца,8 - сканер, 9, 10 - винты
перемещения сканера с образцом
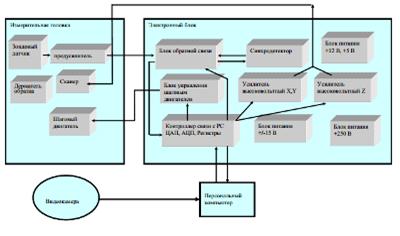
Рис. 38. Функциональная
схема прибора. NanoEducator
Универсальный датчик туннельного тока и силового взаимодействия
В приборе NanoEducator
применяется универсальный датчик туннельного тока и модуляционного силового
взаимодействия. Датчик выполнен в виде пьезокерамической трубки длиной l=7 мм,
диаметром d=1.2 мм и толщиной стенки h=0.25 мм, жесткозакрепленной с одного
конца. На внутреннюю поверхность трубки нанесен проводящий электрод. На внешнюю
поверхность трубки нанесены два электрически изолированных полуцилиндрических
электрода. К свободному концу трубки прикреплена вольфрамовая проволока
диаметром100 мкм (Рис. 39).
Рис. 39. Конструкция
универсального датчика прибора NanoEducator
Свободный конец
проволоки, использующейся в качестве зонда, заточен электрохимически, радиус
закругления имеет величину 0.2÷0.05 мкм.
Зонд имеет электрический контакт с внутренним электродом трубки, соединенным с
заземленным корпусом прибора. При измерении туннельного тока пьезотрубка играет
роль жесткой пассивной консоли. Электрическое смещение прикладывается к образцу
относительно заземленного зонда (Рис. 40). Преобразователь, изображенный на
рисунке, вырабатывает электрическое напряжение Uт, обуславливающее протекание
туннельного тока I и выдает напряжение U пропорциональное этому току в
электронный блок.
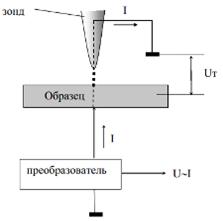
Рис. 40. Принцип
регистрации туннельного тока
В качестве датчика силового взаимодействия одна часть пьезоэлектрической трубки используется как пьезовибратор, а другая - как датчик механических колебаний (Рис. 41). К пьезовибратору подводится переменное электрическое напряжение с частотой, равной резонансной частоте силового датчика. Амплитуда колебаний при большом расстоянии зонд-образец максимальна. Как видно из Рис. 42, в процессе колебаний зонд отклоняется от равновесного положения на величину А0, равную амплитуде его вынужденных механических колебаний (она составляет доли микрона), при этом на второй части пьезоэлемента (датчике колебаний) возникает переменное электрическое напряжение, пропорциональное смещению зонда, которое и измеряется прибором.
При приближении зонда к
поверхности образца зонд начинает касаться образца в процессе колебаний. Это
приводит к смещению амплитудно-частотной характеристики (АЧХ) колебаний датчика
влево по сравнению с АЧХ, измеренной вдали от поверхности (Рис. 42). Так как
частота вынуждающих колебаний пьезотрубки поддерживается постоянной и равной ω0
в свободном состоянии, то при приближении зонда к поверхности
амплитуда его колебаний уменьшается и становится равной A. Эта амплитуда
колебаний регистрируется со второй половины пьезотрубки.
Рис. 41. Принцип работы
пьезоэлектрической трубки в качестве датчика силового взаимодействия
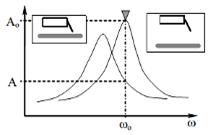
Рис. 42. Изменение
частоты колебаний силового датчика при приближении к поверхности образца
Сканер
Способ организации микроперемещений, использующийся в приборе NanoEducator, основан на использовании зажатой по периметру металлической мембраны, к поверхности которой приклеена пьезопластинка (Рис. 43 а). Изменение размеров пьезопластинки под действием управляющего напряжения будет приводить к изгибу мембраны. Расположив такие мембраны по трем перпендикулярным сторонам куба и соединив их центры металлическими направляющими, можно получить трех координатный сканер (Рис. 43 б).
Каждый пьезоэлемент 1,
закрепленный на гранях куба 2, может передвигать прикрепленный к нему толкатель
3 в одном из трех взаимно перпендикулярных направлений - X, Y или Z при
приложении к нему электрического напряжения. Как видно из рисунка, все три
толкателя соединены в одной точке 4. С некоторым приближением можно считать,
что эта точка перемещается по трем координатам X, Y, Z. К этой же точке
прикрепляется стойка 5 с держателем образца 6. Таким образом, образец
перемещается по трем координатам под действием трех независимых источников
напряжения. В приборах NanoEducator максимальное перемещение образца составляет
около 50-70 мкм, что и определяет максимальную площадь сканирования.
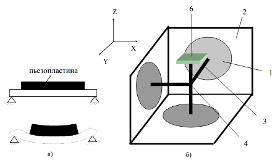
Рис. 43. Принцип действия(а) и конструкция(б) сканера прибора NanoEducator
Механизм автоматизированного подвода зонда к образцу (захват обратной связи)
Диапазон перемещений
сканера по оси Z составляет около10 мкм, поэтому перед началом сканирования
необходимо приблизить зонд к образцу на это расстояние. Для этого предназначен
механизм подвода, схема которого приведена на Рис. 44. Шаговый двигатель 1 при
подаче на него электрических импульсов вращает винт подачи 2 и перемещает
планку 3 с зондом 4, приближая или отдаляя его от образца 5, установленного на
сканере 6. Величина одного шага составляет около 2 мкм.
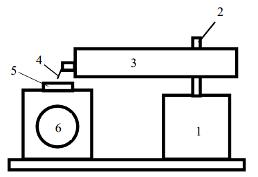
Рис. 44. Схема механизма
подвода зонда к поверхности образца
Так как шаг механизма подвода значительно превосходит величину требуемого расстояния зонд-образец в процессе сканирования, то во избежание деформации зонда его подвод осуществляется при одновременной работе шагового двигателя и перемещениям сканера по оси Z по следующему алгоритму:
Система обратной связи отключается и сканер “втягивается”, т.е. опускает образец в нижнее крайнее положение:
. Механизм подвода зонда производит один шаг и останавливается.
. Система обратной связи включается, и сканер плавно поднимает образец, одновременно производится анализ наличия взаимодействия зонд-образец.
. Если взаимодействие отсутствует, процесс повторяется с пункта 1.
Если во время вытягивания сканера вверх появится ненулевой сигнал, система обратной связи остановит движение сканера вверх и зафиксирует величину взаимодействия на заданном уровне. Величина силового взаимодействия, при котором произойдет остановка подвода зонда, и будет происходить процесс сканирования, в приборе NanoEducator характеризуется параметром AmplitudeSuppression (подавление амплитуды):
=A0(1- Amplitude
Suppression)
.2 Проведение СЗМ
эксперимента
После вызова программы
NanoEducator на экране компьютера появляется главное окно (Рис. 45). Работу
начинаю с пункта меню File и в нем выбраю Open или New либо соответствующие им
кнопки на панели инструментов. Выбор команды File⇒New
означает переход к проведению СЗМ измерений, а выбор команды File⇒Open
означает переход к просмотру и обработке ранее полученных данных. Программа
позволяет осуществлять просмотр и обработку данных параллельно с измерениями.
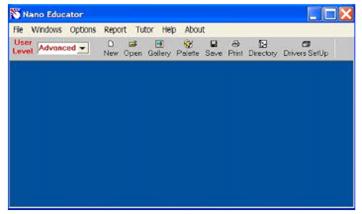
Рис. 45. Главное окно
программыNanoEducator
После выполнения команды
File⇒New на экране появляется окно диалога, которое позволяет выбрать
или создать рабочий каталог, в который по умолчанию будут записываться
результаты текущего измерения. В процессе проведения измерений все полученные
данные последовательно записываются в файлы с именами ScanData+i.spm, где
индекс i обнуляется при запуске программы и наращивается при каждом новом
измерении. Файлы ScanData+i.spm помещаются в рабочий каталог, который
устанавливается перед началом измерений. Существует возможность выбора другого
рабочего каталога во время проведения измерений. Для этого необходимо нажать
кнопку![]() ,
расположенную на панели инструментов главного окна программы.
,
расположенную на панели инструментов главного окна программы.
Для сохранения
результатов текущего измерения нажимаю кнопку SaveExperiment в окне
сканирования. В появившемся окне диалога выбираю каталог и указываю имя файла,
при этом файл ScanData+i.spm, который служит временным файлом сохранения данных
в процессе проведения измерений, будет переименован в заданное мной имя файла.
Если не выполнить операцию сохранения результатов измерений, то при следующем
запуске программы результаты, записанные во временных файлах ScanData+i.spm,
будут последовательно перезаписываться (если не изменен рабочий каталог). О
наличии временных файлов результатов измерений в рабочем каталоге выдается
предупреждение перед закрытием и после запуска программы. Стандартное имя
ScanData можно изменить, задав его в окне выбора рабочего каталога. Вызов окна
выбора рабочего каталога происходит при нажатии кнопки ![]() ,
расположенной на панели инструментов главного окна программы. Сохранить
результаты измерений можно также в окне SPM FileExplorer, поочередно выделяя
необходимые файлы и сохраняя их в выбранном каталоге.
,
расположенной на панели инструментов главного окна программы. Сохранить
результаты измерений можно также в окне SPM FileExplorer, поочередно выделяя
необходимые файлы и сохраняя их в выбранном каталоге.
Существует возможность
экспорта результатов, полученных при помощи прибора NanoEducator в ASCII
формат, который может быть импортирован программой НТ МДТ Nova и другими
программами. ВASCII формат экспортируются изображения сканов, а также данные их
сечений. Для экспорта данных необходимо нажать кнопку ![]() Export,
расположенную в инструментальной панели главного окна программы, либо выбрать
Export→ASCII в пункте меню File этого окна.
Export,
расположенную в инструментальной панели главного окна программы, либо выбрать
Export→ASCII в пункте меню File этого окна.
После закрытия окна
диалога на экран выводится панель управления прибором (Рис. 46). В левой части
панели управления прибором расположены кнопки выбора конфигурации СЗМ:
сканирующий силовой микроскоп (ССМ) сканирующий туннельный микроскоп (СТМ).

Рис. 46. Панель управления
прибором
Для подготовки к ССМ измерениям были выполнены следующие операции.
Установка образца.
Перед установкой образца снимаю датчик с зондом, чтобы не повредить зонд.
Устанавливаю образец на магнитном столике (образец прикреплен к металлическому держателю).
Установка зондового датчика
Эту операцию выполняю при верхнем положении держателя датчика. Датчик перевожу в верхнее положение поворотом винта ручного подвода 1 по часовой стрелке (Рис. 47).
Зондовый датчик
удерживаю за металлические кромки основания) (см. Рис. 47), ослабляю винт
фиксации зондового датчика 2 на крышке измерительной головки. Вставляю датчик в
гнездо держателя до упора, завинчиваю винт фиксации по часовой стрелке до
легкого упора.
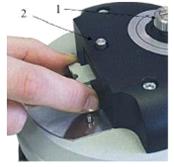
Рис. 47. Установка
зондового датчика
Выбор места сканирования
Для выбора участка для исследования на образце использую винты перемещения двух координатного столика, расположенного в нижней части прибора.
Предварительный подвод зонда к образцу
Операция предварительного подвода не является обязательной для каждого измерения, необходимость ее выполнения зависит от величины расстояния между образцом и острием зонда. Операцию предварительного сближения желательно производить, если расстояние между кончиком зонда и поверхностью образца превышает 0.5÷1 мм. При использовании автоматизированного подвода зонда к образцу с большого расстояния между ними процесс подвода займет очень много времени.
Построение резонансной кривой и установка рабочей частоты
Эта операция обязательно выполняется в начале каждого эксперимента и, пока она не произведена, переход к дальнейшим этапам измерений заблокирован. Кроме того, в процессе измерений иногда возникают ситуации, требующие повторного выполнения этой операции (например, при потере контакта).
Окно поиска резонанса
вызываю нажатием кнопки ![]() .
Выполнение этой операции предусматривает измерение амплитуды колебаний зонда
при изменении частоты вынужденных колебаний, задаваемых генератором. Для этого
нажимаю кнопку RUN (48).
.
Выполнение этой операции предусматривает измерение амплитуды колебаний зонда
при изменении частоты вынужденных колебаний, задаваемых генератором. Для этого
нажимаю кнопку RUN (48).
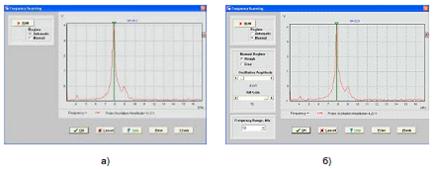
Рис. 48. Окно режима
поиска резонанса и установки рабочей частоты: а) - автоматический режим, б) -
ручной режим
В режиме Automatic автоматически устанавливается частота генератора, равная частоте, при которой наблюдалась максимальная амплитуда колебаний зонда. График, демонстрирующий изменение амплитуды колебаний зонда в заданном диапазоне частот (48 а), позволяет наблюдать форму резонансного пика. Если резонансный пик недостаточно ярко выражен, или амплитуда при частоте резонанса мала (менее 1V), то необходимо изменить параметры проведения измерений и повторно провести определение резонансной частоты.
Для этого предназначен режим Manual. При выборе этого режима в окне Frequency Scanning появляется дополнительная панель (Рис. 48 б), позволяющая корректировать следующие параметры:
Амплитуда колебаний, задаваемых генератором (Oscillation Amplitude). Рекомендуется устанавливать эту величину минимальной (вплоть до нуля) и не более 50 мV.
Коэффициент усиления амплитуды (AM Gain). При недостаточной величине амплитуды колебаний зонда (<1 V) рекомендуется увеличить коэффициент AM Gain.
Для начала операции поиска резонанса необходимо нажать кнопку RUN.
Режим Manual позволяет вручную менять выбранную частоту, передвигая зеленый курсор на графике с помощью мыши, а также уточнить характер изменения амплитуды колебаний в узком диапазоне значений вокруг выбранной частоты (для этого необходимо установить переключатель Manual Regime в положение Fine и нажать кнопку RUN).
Захват взаимодействия
Для захвата
взаимодействия выполняю процедура контролируемого сближения зонда и образца с
помощью механизма автоматизированного подвода. Окно управления этой процедурой
вызывается нажатием кнопки ![]() панели управления
прибором и выбором
панели управления
прибором и выбором ![]() в
появившемся выпадающем меню. При работе с ССМ эта кнопка становится доступной
после выполнения операции поиска и установки резонансной частоты. Окно Scanning
Force Microscopy, Landing (Рис. 49) содержит элементы управления подводом
зонда, а также индикации параметров, которые позволяют анализировать ход
выполнения процедуры.
в
появившемся выпадающем меню. При работе с ССМ эта кнопка становится доступной
после выполнения операции поиска и установки резонансной частоты. Окно Scanning
Force Microscopy, Landing (Рис. 49) содержит элементы управления подводом
зонда, а также индикации параметров, которые позволяют анализировать ход
выполнения процедуры.
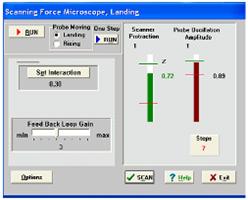
Рис. 49. Окно режима
захвата взаимодействия
В окне LANDING имеем возможность наблюдать за следующими величинами:
вытянутость сканера (Scanner Protraction) по оси Z относительно максимально возможной, принятой за единицу. Величина относительного удлинения сканера характеризуется уровнем заполнения левого индикатора цветом, соответствующим зоне, в которой находится сканер в текущий момент: зеленый цвет - рабочая зона, синий - вне рабочей зоны, красный - сканер подошел слишком близко к поверхности образца, что может повлечь деформацию зонда. В последнем случае программа выдает звуковое предупреждение;
амплитуда колебаний зонда (Probe Oscillation Amplitude) относительно амплитуды его колебаний в отсутствии силового взаимодействия, принятой заединицу. Величина относительной амплитуды колебаний зонда показана на правом индикаторе уровнем его заполнения бордовым цветом. Горизонтальная метка на индикаторе Probe Oscillation Amplitude указывает на уровень при переходе через который производится анализ состояния сканера и его автоматический вывод в рабочее положение;
количество шагов (Steps), пройденных в заданном направлении (ProbeMoving): Landing- сближение, Rising- удаление.
До начала процесса опускания зонда:
. Убедился, что в элементе Probe Moving выбран пункт Landing (сближение)
. Проверил правильность установок параметров сближения: