Материал: ПРОЕКТИРОВАНИЕ ПРИВОДА ДВУХЦИЛИНДРОВОГО
y r COS l 
 1 (r / l)2 SIN 2
1 (r / l)2 SIN 2
Откуда, учитывая, что перемещение ползуна |
s l r y , |
|
||||||
После преобразований получим |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
S r (1 |
1 |
COS |
( |
1 |
)2 |
SIN 2 ) |
|
|
|
|
(4.1) |
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
||||
Рис 4.1
21

Где величина геометрического параметра будет rl .
Скорость точки В найдем беря производную по времени от выражения для перемещения (4.1).
V r (SIN |
SIN COS |
|
) |
|
||||
|
|
|
|
|
|
(4.2) |
||
|
|
1 |
)2 |
SIN 2 |
||||
|
|
|
|
|
||||
|
( |
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
Аналогичным образом, беря производную от (4.2), можно найти выражение для ускорения точки В. В данном проекте при силовом расчете механизма инерционные силы и моменты не учитываются. Поэтому выражение для ускорения точки В не приводится.
Таким образом, применение аналитических методов анализа (синтеза)
плоских механизмов позволяет выводить аналитические зависимости кинематических параметров звеньев и характерных точек механизма.
4.3 Аналог скорости
Как видно из выражения (4.2) кинематические параметры ведомого звена зависят от скорости ведущего. Для удобства анализа работы механизма скорость ведомого звена удобно выражать в функции обобщенных координат ведущего звена, в качестве которых выбираются либо угол поворота , либо перемещение S ведущего звена. Такое выражение называется аналогом
скорости.
Так как аналог скорости зависит только от обобщенных координат и не зависят от времени кинематическое исследование механизма можно вести чисто геометрическим методом.
Для рассмотренного выше примера расчета КПМ аналогами скорости я
ползуна, как следует из выражений (4.2), очевидно будут:
22

S ' r (SIN |
|
SIN COS |
|
) |
|
|||
|
|
|
|
|
|
(4.3) |
||
|
||||||||
|
|
|
1 |
)2 |
SIN 2 |
|||
|
( |
|
||||||
|
|
|
||||||
|
|
|
||||||
Чтобы наглядно представить характер изменения функций положения и функций аналога скорости строят их графики.
4.4.Построение графиков функции перемещения,
ианалога скорости
Построение графиков функций целесообразно производить на
компьютере с помощью программы ''EXCEL”. Используя эту же программу можно оформить таблицы результатов расчетов этих величин, а также построить соответствующие графики.
Условимся координату S1 ( ) считать положительной. Расчеты S1 ( )
производят за полный оборот кривошипа с интервалом φ = 15о. Для построения графика функции перемещения для второго ползуна S2 ( ) , в
формуле (4.6) угол заменяют на ( 2 ) .
Результаты расчетов по формулам (4.1) и (4.2) сводятся в таблицу.
таблица 4.1
Расчет кинематических параметров ползунов КПМ
град |
рад |
S1 (м) |
S2 (м) |
S'1 (м) |
S'2 (м) |
S"1 (м) |
S"2 (м) |
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0,031263 |
0 |
-0,02842 |
0,034105 |
-0,00568 |
15 |
0,261799 |
0,00115878 |
0,023716 |
0,008777 |
-0,02887 |
0,032375 |
0,002433 |
30 |
0,523599 |
0,00451813 |
0,016342 |
0,016672 |
-0,02707 |
0,027455 |
0,011368 |
45 |
0,785398 |
0,00974518 |
0,009745 |
0,022938 |
-0,02294 |
0,020096 |
0,020096 |
60 |
1,047198 |
0,01634176 |
0,004518 |
0,027074 |
-0,01667 |
0,011368 |
0,027455 |
75 |
1,308997 |
0,02371637 |
0,001159 |
0,028873 |
-0,00878 |
0,002433 |
0,032375 |
|
|
|
|
23 |
|
|
|
90 |
1,570796 |
0,03126251 |
2,3E-13 |
0,02842 |
-1,3E-07 |
-0,00568 |
0,034105 |
105 |
1,832596 |
0,03842788 |
0,001159 |
0,026031 |
0,008777 |
-0,01228 |
0,032375 |
120 |
2,094395 |
0,04476222 |
0,004518 |
0,022152 |
0,016671 |
-0,01705 |
0,027455 |
135 |
2,356194 |
0,04993778 |
0,009745 |
0,017254 |
0,022938 |
-0,0201 |
0,020096 |
150 |
2,617994 |
0,05374381 |
0,016342 |
0,011749 |
0,027074 |
-0,02177 |
0,011368 |
165 |
2,879793 |
0,0560629 |
0,023716 |
0,005935 |
0,028873 |
-0,02253 |
0,002433 |
180 |
3,141593 |
0,05684092 |
0,031262 |
2,79E-18 |
0,02842 |
-0,02274 |
-0,00568 |
195 |
3,403392 |
0,0560629 |
0,038428 |
-0,00593 |
0,026031 |
-0,02253 |
-0,01228 |
210 |
3,665191 |
0,05374381 |
0,044762 |
-0,01175 |
0,022152 |
-0,02177 |
-0,01705 |
225 |
3,926991 |
0,04993778 |
0,049938 |
-0,01725 |
0,017254 |
-0,0201 |
-0,0201 |
240 |
4,18879 |
0,04476222 |
0,053744 |
-0,02215 |
0,011749 |
-0,01705 |
-0,02177 |
255 |
4,45059 |
0,03842788 |
0,056063 |
-0,02603 |
0,005935 |
-0,01228 |
-0,02253 |
270 |
4,712389 |
0,03126251 |
0,056841 |
-0,02842 |
8,35E-08 |
-0,00568 |
-0,02274 |
285 |
4,974188 |
0,02371637 |
0,056063 |
-0,02887 |
-0,00593 |
0,002433 |
-0,02253 |
300 |
5,235988 |
0,01634176 |
0,053744 |
-0,02707 |
-0,01175 |
0,011368 |
-0,02177 |
315 |
5,497787 |
0,00974518 |
0,049938 |
-0,02294 |
-0,01725 |
0,020096 |
-0,0201 |
330 |
5,759587 |
0,00451813 |
0,044762 |
-0,01667 |
-0,02215 |
0,027455 |
-0,01705 |
345 |
6,021386 |
0,00115878 |
0,038428 |
-0,00878 |
-0,02603 |
0,032375 |
-0,01228 |
360 |
6,283185 |
1,7064E-34 |
0,031263 |
-8,4E-18 |
-0,02842 |
0,034105 |
-0,00568 |
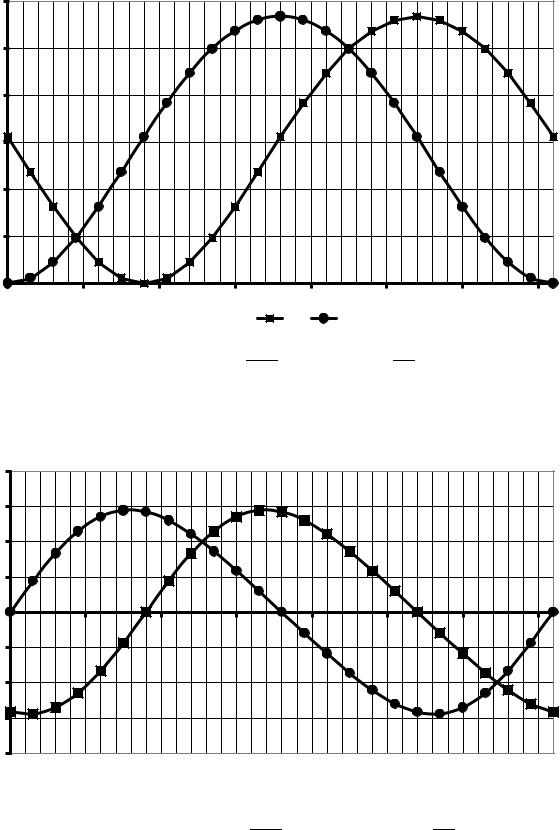
По данным (таблицы 4.1 ) с помощью той же программы строим графики
соответствующих зависимостей рис 4.2, 4.3,4.4
24
S(м) |
|
|
перемещени ползуна |
|
|
|||
|
|
|
|
|
|
|
|
|
0,06 |
|
|
|
|
|
|
|
|
0,05 |
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
|
0,03 |
|
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
|
0,01 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
|
|
|
|
|
s2 |
S1 |
|
|
угол (град) |
|
|
|
|
|
|
|
||
|
Рис.4.2 ( = 1,36 град; = 0,053 |
м ) |
|
|
||||
|
|
|
|
мм |
|
мм |
|
|
S' (м) |
|
|
аналог скорости |
|
|
|
||
|
|
|
|
|
|
|
|
|
0,04 |
|
|
|
|
|
|
|
0,03 |
|
|
|
|
|
|
|
0,02 |
|
|
|
|
|
|
|
0,01 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
угол (град) |
|
|
|
|
|
|
|
|
0 |
50 |
100 |
150 |
200 |
250 |
300 |
350 |
-0,01 |
|
|
|
|
|
|
|
-0,02 |
|
|
|
|
|
|
|
-0,03
-0,04

 S'2
S'2  S'1
S'1
Рис.4.3 ( = 1,622 градмм ; ′ = 0,00034 ммм )
25