Материал: ПРОЕКТИРОВАНИЕ ПРИВОДА ДВУХЦИЛИНДРОВОГО
По формуле Чебышева определяем подвижность насоса:
= 3 − (2н + в)
Получим: W=3*5-(2*9+0)=-3,
Что говорит о наличии избыточных связей, число которых, с учетом реальной степени подвижности такого механизма равной W=1, будет:
q=W-3n+2P+Pв = 1-15+18=4.
Эти избыточные связи образованы подшипниками кривошипа, введенными из конструктивных соображений.
Убирая эти связи и представляя структурную схему в виде Рис. 2.2.
Для этой схемы получим:
Число звеньев n=5.
Низшие кинематические пары Pн=7 (0-1:1-2;2-3;3-0:1-5;5-4;4-0).
Тогда
W=3*5-2*7=1.
И |
q=1-3*5+2*7=0 |
6
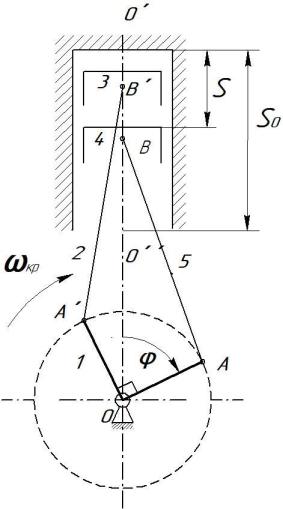
Рис.2.2 Структурная схема насоса.
2.2 Структурный анализ зубчатого редуктора.
Структурная схема зубчатого редуктора приведена на Рис.2.3.
Как видно из Рис.2.3а редуктор состоит из двух звеньев: шестерни – 1 и
колеса – 2. Таким образом n=2 Эти звенья образуют между собой высшую кинематическую пару (1-2), а также четыре низшие пары со стойкой: 1-0 (2
пары) и 2-0 (2 пары). Таким образом имеем: n=2: Рн=4 и Рв=1.
7
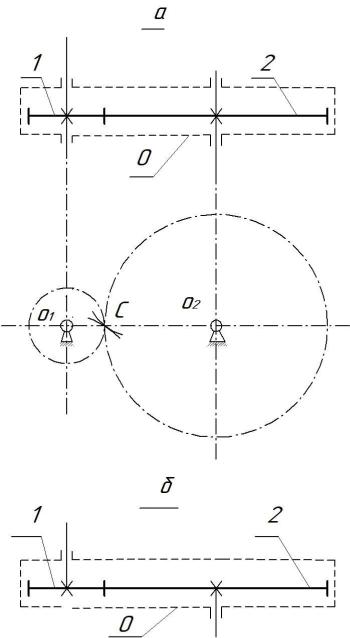
Рис.2.3 Структурная схема одноступенчатого редуктора.
Тогда степень подвижности редуктора будет:
W=3*2-4*2-1= -3.
Число избыточных связей
q=1-3*2+2*4+1=4
8

Если убрать две избыточные кинематические пары введенные из конструктивных соображений (Рис. 2.3б), получим:
W=3*2-2*2-1=1
И
q=1-3*2+2*2+1=0.
Таким образом структурный анализ механизмов, входящих в машинный агрегат привода насоса показал, что их степень подвижности равна 1 т.е. для его привода необходимо одно ведущее звено. С другой стороны наличие избыточных связей предполагает высокую точность изготовления звеньев механизмов.
3.МЕТРИЧЕСКИЙ СИНТЕЗ ГИДРАВЛИЧЕСКОГО НАСОСА.
Механизмом насоса является шестизвенный кривошипно-ползунный механизм. Поскольку в нем центр вращения кривошипа находиться на прямой, по которой перемещается центр шарнира B(B), то механизм называется соосным.
Целью метрического синтеза является определение длин звеньев механизма насоса: радиуса кривошипа rкр и длины шатуна lш по заданной подаче насоса и другим исходным параметрам.
3.1. Основные положения
Теоретическая подача QТ насоса или его расход больше фактической подачи:
QQ , м3/с,
Тηоб
9
где ηоб – объемный кпд насоса(безразмерный коэффициент подачи насоса),
учитывающий утечки и перетечки рабочей жидкости в рабочих камерах В курсовом проекте рекомендуется принимать ηоб =0,8…0,9
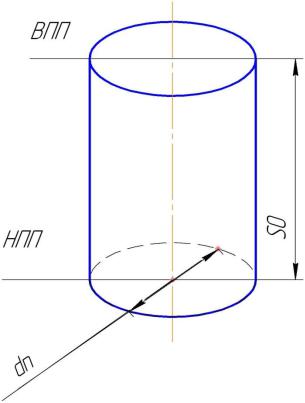
рис. 3.1 Рабочий объем насоса
На рис. 3.1 обозначено:
ВПП – верхнее предельное положение поршня НПП – нижнее предельное положение поршня
So, м – рабочий ход поршня
dП , м – диаметр поршня
Номинальный рабочий объем одного цилиндра насоса подобного типа:
|
|
Vo = A· So, м3 |
где |
A πd П2 |
; – площадь цилиндра, м 2 |
|
4 |
|
|
|
10 |