Материал: ПРОЕКТИРОВАНИЕ ПРИВОДА ДВУХЦИЛИНДРОВОГО
aцA 2ОА.
Это ускорение направлено из точки А к точке О. Выбирая произвольную точку Pa в качестве полюса плана ускорений (рис 4.1в), переносим вектор в точку полюса, в соответствующем масштабе а . Ускорение точки В
конца шатуна определится как векторная сумма ускорения точки А
относительного центростремительного и вращательного ускорений точки В по отношению к точке А.
|
|
|
|
|
|
|
в р . |
а |
В |
а |
А |
а |
ц |
а |
|
|
|
|
В. А |
|
В. А |
Направление центростремительного ускорения точки В будет параллельна прямой АВ, а величина
аВц / А АВ2 АВ
Строим на плане ускорений в соответствующем масштабе А ускорение
из конца вектора аА . Вращательная составляющая ускорения точки В
не известна по величине и направлена перпендикулярно АВ поэтому из
конца вектора на плане ускорений проводим линию перпендикулярную
АВ.
Абсолютное ускорение точки В очевидно будет направлено по линии
ОВ. Тогда, проводя из точки Ра линию параллельную ОВ, на пересечении
этих двух прямых получаем точку в, соответствующую концу вектора аВ на
16
плане ускорений. Величину ускорения точки В получаем из плана ускорений с учетом масштаба
аВ а Рав .
Найдя аналогично величину вращательного ускорения можно определить угловое ускорение звена АВ
АВ |
|
aВв р/ А |
. |
|
|||
|
|
АВ |
|
Графоаналитический метод исследования нагляден и универсален, так как позволяет определять скорости и ускорения звеньев механизмов любой структуры, но не обладает достаточной точностью и трудоемок.
4.1.1 Расчет кинематических параметров гидравлического
насоса..
По известным из предыдущих расчетов размерам звеньев вычерчиваем структурную схему насоса (Рис.4.2а)
Положение кривошипа, в соответствии с техническим заданием,
определяется углом поворота φ=15°. Размеры схемы задаются масштабным коэффициентом указанном на рисунке.
17
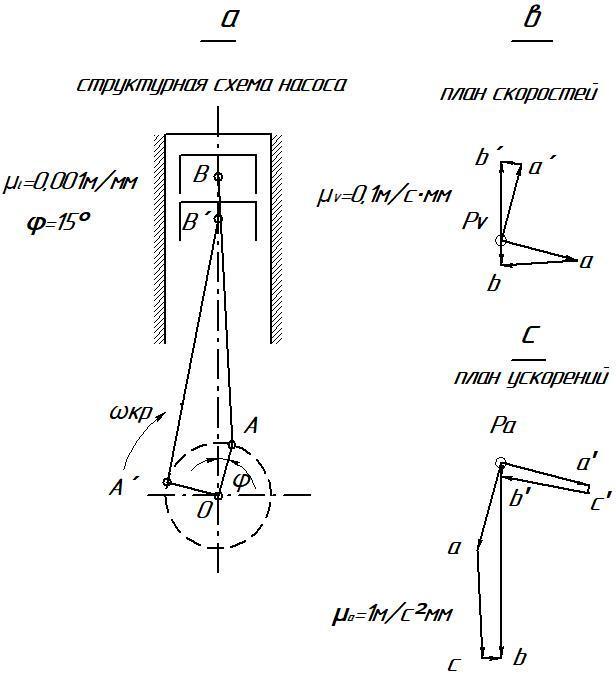
Рис.4.2 построение планов скоростей и ускорений.
На Рис.4.2 в,с показаны планы скоростей и ускорений характерных точек исследуемого насоса построенные по вышеописанному алгоритму.
На основании этих планов находим скорости и ускорения этих точек, а так же угловые скорости и ускорения звеньев.
Из плана скоростей:
18
|
|
|
= =29,33∙ 0,028 = 4.165 |
М |
|
|
|
|
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
" |
|
|
|
С |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
= 0,6812 |
М |
; |
= 2,083 |
|
; |
= 0,543 |
|
; |
= 2,0167 |
|
|||
|
|
|
|
|||||||||||
|
|
С |
′ |
|
|
′ ′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Тогда: = 2,01670,142 = 14,202 12; ′ ′=0,5430,142 = 3.824 12.
Из плана ускорений:
= ′=29,332 ∙ 0,028 = 24,086 2
= 3,64 2 ; ′ = 51,677 2
ц =14,2022 ∙ 0,142 = 28,641 2
ц′ = 3,8242 ∙ 0,142 = 2,076 см2
вр=2,038 2 ; ВР′ = 4,9 2
Откуда:
εAB=0,2,038.142=14,352 C12; εA′B′=0,1424,9 =34,507 C12
4.2 Аналитический метод.
При решении многих практических задач, таких как расчет мощности двигателя, воздействия машины на раму и фундамент, постановка противовесов требуются выражения для перемещения, скорости и ускорения звеньев механизма.
Аналитическое исследование плоских механизмов удобнее всего вести методом векторных контуров, разработанных В.А. Зиновьевым.
В соответствии с этим методом нахождение кинематических характеристик механизма производится в следующем порядке:
19
1)Чертим в любом промежуточном положении структурную схему механизма.
2)Выбираем систему координат. (начало обычно связывают со стойкой начального звена).
3)Все звенья механизма, включая и стойку, заменяют векторами произвольного направления.
4)Полученные векторы объединяют между собой так, чтобы они образовывали замкнутые контуры. В каждый контур должно входить не более двух неизвестных величин.
5)Составляем векторные уравнения замкнутости полученных контуров в соответствии с выбранным направлением обхода. Спроектировав эти уравнения на оси координат, получим базовые системы уравнений для расчета кинематических характеристик звеньев.
Обозначив, в рассматриваемом КПМ (рис 4.2), звенья механизма векторами ОА, АВ и ОВ и задаваясь направлением обхода, составим уравнение замкнутости векторного контура ОАВ.
rl y 0
Где r и l радиус кривошипа и длина шатуна соответственно.
Выбрав оси координат x и y, спроектируем это уравнение:
x:r SIN l SIN 0
y:r COS l COS y 0
где неизвестными будут величина y и угол .
Решая эти уравнения получим
20