Материал: ПРОЕКТИРОВАНИЕ ПРИВОДА ДВУХЦИЛИНДРОВОГО
Т. к. насос двухпоршневой двухстороннего действия, то рабочий объем насоса равен:
V 2 πd П2 |
2S |
πd 2 |
S . |
(3.1) |
|
o |
4 |
o |
П |
o |
|
|
|
|
|
|
|
Связь между рабочим объемом насоса и его расходом:
QТ |
|
|
Vo nкр |
, |
(3.2) |
|
60 |
||||||
|
|
|||||
|
|
|
|
|||
где nкр, об/мин - частота вращения кривошипа.
3.2Метрический синтез механизма насоса
Из равенства (3.2) устанавливается объем насоса
VQ 60 .
οnкр ηоб
Принимая ᶯоб=0,8, получим
Vο 0,015 60 0,004м3 280 0,8
Рабочий ход поршня в метрах находят из равенства (3.1):
So 0,004 0,057м. π0,152
При соосной схеме КПМ, ход поршня определен радиусом (длиной)
кривошипа:
So=2rкр,
Таким образом искомые величины определяются следующим образом:
Длина кривошипа
rкр 12 0,057 0,028м ,
11

Длина шатуна
lш rкрλ 0,0280,2 0,142м,
где величина λ определена заданием на курсовой проект.
Результаты метрического синтеза отражают в графической части курсового проекта. На листе формата А1 изображают схему механизма,
задавая положение кривошипа ОА углом φ = 15о
Найденные длины звеньев rкр и lш чертят в выбранном масштабе с помощью масштабного коэффициента μl
μl |
|
истин.величина |
|
м |
|
|
|
|
|
||
|
|
|
|
||
|
|
граф.отображение(отрезок) |
мм |
||
|
|
|
|
|
|
12
4 КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
На этапе кинематического анализа механизма определяются траектории,
скорости и ускорения характерных точек и элементов механизма. При этом силы, действующие на механизм, не учитываются. Кинематический анализ может быть выполнен графическим и аналитическим методами.
4.1 Графоаналический метод
Данный метод применяется в случае, когда возникает необходимость определить скорости и ускорения характерных точек механизма и угловых скоростей и ускорений его звеньев в определенный момент времени,
соответствующий определенному положению механизма. Для решения этой задачи должны быть заданы кинематическая схема механизма и закон движения начального звена (для механизмов с одной степенью свободы).
График перемещений строится при определенном положении механизма за один цикл его движения. В практической работе план механизма строится для одного положения звеньев и поэтому графики их траекторий не делается.
Построение планов скоростей и ускорений, основывающихся на известных теоремах теоретической механики о скоростях и ускорениях точек твердого тела, рассмотрим на примере центрального кривошипноползунного механизма (КПМ), схема которого в заданном положении и в соответствующем масштабе показана на рис 4.1а.
Кривошип ОА вращается с угловой скоростью .Скорость точки А определяется как
VA OA
13
и направлена перпендикулярно кривошипу ОА в сторону задаваемую направлением вращения.
Для построения плана скоростей из произвольной точки PV (полюса плана скоростей) в масштабе V проводим вектор VA
(рис 4.1б).
Скорость точки В, принадлежащей как и точка А, шатуну АВ
определяется по формуле
|
VB VA VB / A |
||
где |
относительная скорость |
(VB / A ) |
точки В будет перпендикулярна |
прямой |
АВ. Поэтому из конца |
вектора |
VA (точки а) проводим линию |
перпендикулярную шатуну АВ. С другой стороны, абсолютная скорость точки В должна быть направлена по вертикали ОА. Из полюса проводим линию параллельную линии ОА и в точке пересечения этих линий находим точку в, являющуюся концом вектора абсолютной скорости точки В (VB ) в
выбранном масштабе плана скоростей. Вектор ав на плане скоростей соответствует относительной скорости точки В по отношению к точке
А (VA / B ).
14
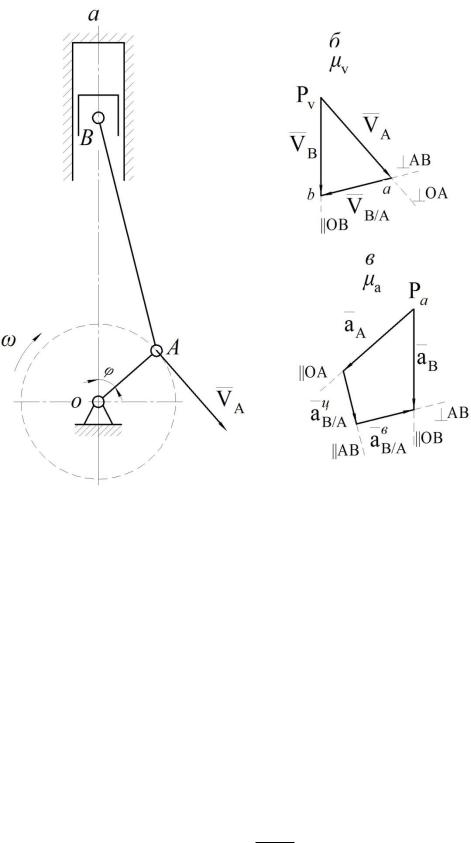
рис. 4.1
Из плана скоростей находим
VB V pV b
и
VA / B V ab .
Угловая скорость вращения шатуна АВ определиться как:
VA / B .
AB AB
Для построения плана ускорений определим ускорения точки А (конца
кривошипа ОА, который вращается с постоянной угловой скоростью.
15