Материал: Проектирование и исследование механизма рычажного пресса
Проектирование и исследование механизма рычажного пресса
СОДЕРЖАНИЕ
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
. ЗАДАНИЕ НА КУРСОВОЙ ПРОЕКТ
. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ РЫЧАЖНОГО МЕХАНИЗМА
.1 СТРУКТУРНЫЙ АНАЛИЗ
.2 ОПРЕДЕЛЕНИЕ РАЗМЕРОВ МЕХАНИЗМА И ПОСТРОЕНИЯ ПЛАНА ПОЛОЖЕНИЙ
.3 ПОСТРОЕНИЕ ПЛАНОВ СКОРОСТЕЙ
.4 ПОСТРОЕНИЕ КИНЕМАТИЧЕСКИХ ДИАГРАММ
.5 ПОСТРОЕНИЕ ПЛАНОВ УСКОРЕНИЙ
. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В КИНЕМАТИЧЕСКИХ ПАРАХ
. СИНТЕЗ ЗУБЧАТОГО МЕХАНИЗМА
.1 ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ ПЕРЕДАЧИ
.2 ПОСТРОЕНИЕ КАРТИНЫ ЭВОЛЬВЕНТНОГО ЗАЧЕПЛЕНИЯ
.3 СИНТЕЗ ПЛАНЕТАРНОГО РЕДУКТОРА
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
Введение
Целью данной курсовой работы является проектирование и исследование механизма рычажного пресса.
Механизмом называется искусственно созданная система тел, предназначенная для преобразования движения одного или нескольких тел в требуемые движения других тел. Кинематической парой называется соединение двух соприкасающихся звеньев, допускающее их относительное движение. Кинематической цепью называется связанная система звеньев, образующих между собою кинематические пары. Простой кинематической цепью называется цепь, у которой каждое звено входит не более чем в две кинематические пары. Сложной кинематической цепью называется цепь, у которой имеется хотя бы одно звено, входящее более чем в две кинематические пары. Замкнутой кинематической цепью называется цепь, каждое звено которой входит по крайней мере в две кинематические пары. Незамкнутой кинематической цепью называется цепь, у которой есть звенья, входящие только в одну кинематическую пару. Машинным агрегатом называется устройство, состоящее из машины-двигателя, рабочей машины и передаточного механизма. Машиной-двигателем называется такая машина, в которой тот или иной вид энергии преобразуется в механическую работу на ее выходном звене. Рабочей машиной называется такая машина, которой механическая работа, передающаяся на ее входное звено от двигателя, преобразуется ее рабочим органом в работу, необходимую для совершения технологического процесса, на который рассчитана машина. Передаточный механизм служит для преобразования момента, снимаемого с выходного звена двигателя, в момент на входном звене рабочей машины (как правило, это преобразование идет в сторону увеличения момента на входном звене рабочей машины). Приведенный момент (сила), который стремится ускорить движение ведущего звена, называется движущим моментом, а приведенный момент (сила), который стремится замедлить движение ведущего звена, называется моментом сопротивления.
1. Задание на курсовой проект
Пресс приводится в действие электродвигателем через планетарный редуктор и пару зубчатых колёс с числом зубьев Za, Zb. Колесо Zb насажано на коленчатый вал 1 (рис. 12а ) кривошип которого приводит в действие шарнирно- рычажный механизм прессования. Ползуну 5 сообщается возвратно-поступательное движение, посредством которого происходит прессование. Кулачок пазового типа вращается вместе с кривошипом и через качающуюся вокруг шарнира Н штангу 6 передаёт движение на загрузочную каретку, которая в периоды отхода ползуна 5 вверх загружает порошком пресс-форму. График усилия прессования в зависимости от перемещения ползуна 5 показан на рисунке 12в. Кинематическая схема механизма прессования показана на рисунке 12б.
Заданные величины: ход пуансона SF; линейные размеры звеньев lCD, lDE, lEF, lGH; координирующие размеры L1, L2, L3; частота вращения кривошипа n1 об/мин; силы тяжести звеньев G2, G3, G4, G5; моменты инерции звеньев I1, I2, I3; максимальное усилие прессования P5max; межцентровое расстояние Aω=Аав; число зубцов Za, Zb; модули зацепления mпл и mав; угол размаха штанги βраз; минимальный радиус кулачка ro; фазовые углы кулачка φвв, φуд, φпр; варианты законов изменения ускорений штанги кулачкового механизма приведены в таблице 11.
Частоту вращения двигателя во всех вариантах принять nд=1440 об/мин.
Коэффициент неравномерности хода принять δ=0,1…0,15. Длины звеньев lAB, lBC подлежат
расчёту.
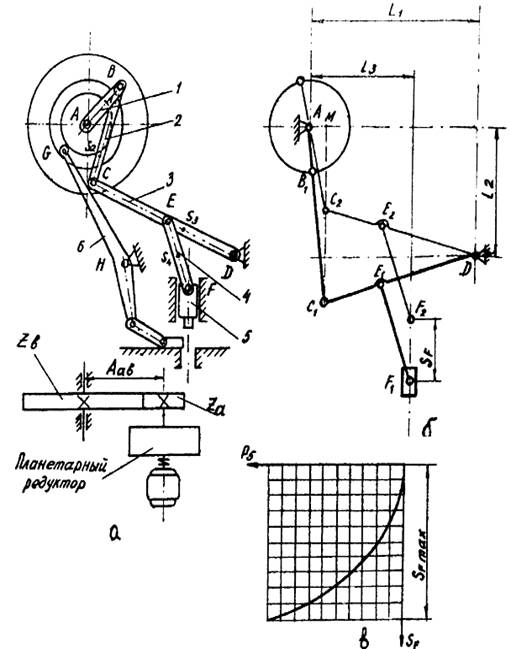
Рис. 1. Рычажный пресс для изготовления изделий из порошковых материалов:
а - кинематическая схема пресса; б - кинематическая схема механизма
прессования; в - график нагрузки прессования.
Исходные данные к заданию №11 Таблица 1
|
Наименование |
Обозначение |
Раз мерно сть |
Варианты |
||||
|
|
|
|
1 |
2 |
3 |
4 |
5 |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
|
Ход ползуна |
SF |
мм |
50 |
60 |
60 |
200 |
160 |
|
Размеры звеньев |
lCD lDE lEF L1 L2 L3 |
мм мм мм мм мм мм |
500 350 250 400 400 50 |
450 320 300 350 400 50 |
420 300 250 450 400 140 |
1020 500 480 820 800 300 |
950 300 550 700 820 400 |
|
Силы тяжести звеньев |
G2 G3 G4 G5 |
Н Н Н Н |
60 80 30 100 |
60 70 40 120 |
58 65 30 100 |
120 180 60 200 |
125 160 70 200 |
|
Моменты инерции звеньев |
J2 J3 J4 |
кгм2 |
0,001 0,02 0,002 |
0,001 0,014 0,004 |
0,009 0,012 0,002 |
0,08 0,18 0,014 |
0,088 0,144 0,02 |
|
Максимальное значение силы сопротивления |
Psmax |
кН |
5,1 |
4,9 |
5,2 |
4,4 |
6,8 |
|
Частота вращения кривошипа |
n1 |
1/мин |
260 |
214 |
200 |
206 |
240 |
|
Модуль зацепления |
mab mпл |
мм мм |
4 3 |
4 3 |
4 3 |
4 3 |
4,5 4 |
|
Числа зубьев |
Za Zb |
|
11 23 |
10 21 |
12 21 |
11 22 |
12 22 |
|
Межосевое расстояние |
Aω |
мм |
66 |
60 |
64 |
68 |
77 |
2. Кинематическое исследование рычажного механизма
2.1 Структурный анализ
Исследуемый механизм, кинематическая схема, которого приведена на рис.
2.1 служит для преобразования вращательного движения кривошипа 1 (входное
звено) в поступательное движение ползуна 5 (выходное звено).
Рисунок 2.1 -Кинематическая схема механизма
Определяем степень подвижности механизма по формуле:
![]() ,
,
де, р5 - число кинематических пар V класса;
р4 - число кинематических пар IV класса;- число подвижных звеньев.
Итак,
![]()
Так как W=1 то у механизма одно входное звено.
Механизм состоит из 5 звеньев:
-стояк;
-кривошип;
-шатун;
-коромысло;
-шатун;
-ползун.
А(1-0) - кинематическая пара пятого класса, вращающееся низшая;
В(1-2)- кинематическая пара пятого класса, вращающееся низшая;
С(2-3) - кинематическая пара пятого класса, вращающееся низшая;(3-0) - кинематическая пара пятого класса, вращающееся низшая;(4-3) - кинематическая пара пятого класса, вращающееся низшая;(5-4) - кинематическая пара пятого класса, вращающееся низшая;(5-0) - кинематическая пара пятого класса, поступательная низшая.
Механизм образован присоединением к стояку A кривошипа, который образует с ним вращательную пару (т.A). Кривошип 1 делает вращательное движение вокруг неподвижного стояка. Шатун 2 совершает сложное плоскопараллельное движение и присоединен к кривошипу 1 (т.B).
Коромысло 3 присоединено к шатуну 2, образуя с ним вращательную кинематическую пару (т.C). Коромысло 3 осуществляет колебательное движение вокруг неподвижного стояка (т.D).
К коромыслу 3 присоединен шатун 4 образуя с ним кинематическую пару (т.E). К шатуну 4 присоединен ползун 5 образуя вращательную кинематическую пару (точка F). Ползун 5 двигаясь вдоль направляющей образуя с ней поступательную кинематическую пару (т. F0).
Разбиваем рассматриваемую схему на группы звеньев, начиная с выходного звена.
Раскладываем
механизм на группы Асура
Рисунок
2.2 - Структурная группа 4-5
Данная группа состоит:
из
двух подвижных звеньев (шатун 4 и ползун 5), т.е. ![]() ;
;
трёх
кинематических пар (вращательная 4 -5, вращательная 0 -5, поступательная 5 -
0), т.е. ![]() .
.
Подставив
найденные значения коэффициентов в формулу Чебышева, получаем:
![]()
Равенство нулю подвижности группы доказывает, что рассматриваемая группа звеньев 4 - 5 является структурной группой.
Данная группа является:
группой второго класса, так как состоит из двух подвижных звеньев;
группой второго порядка, так как имеется два свободных поводка;
группой второго вида, так как состоит из двух вращательных кинематических пар и одной поступательно(ВВП).
Данная
группа II класса и 2-го вида
Рисунок
2.3 - Структурная группа 2-3
Данная группа состоит:
из
двух подвижных звеньев (шатун 2 и коромысло 3), т.е. ![]() ;
;
двух свободных поводков (кривошип 1 и стойка 0);
трёх
кинематических пар (вращательная 2 - 3, вращательная 1 - 3, вращательная 3 -
0), т.е. ![]() .
.
Подставив
найденные значения коэффициентов в формулу Чебышева, получаем:
![]()
Равенство нулю подвижности группы доказывает, что рассматриваемая группа звеньев 2 - 3 является структурной группой.
Данная группа является:
группой второго класса, так как состоит из двух подвижных звеньев;
группой второго порядка, так как имеется два свободных поводка;
группой первого вида, так как состоит из трёх вращательных кинематических пар (ВВВ).
Данная
группа II класса и 1-го вида
Рисунок
2.4 - Начальный механизм
Данная группа состоит:
из
одного подвижного звена (кривошип 1) и шарнирно-неподвижной опоры (стойка 0),
т.е. ![]() ;
;
одной
кинематической пары (вращательная 0 - 1), т.е. ![]() .
.
Подставив
найденные значения коэффициентов в формулу Чебышева, получаем:
![]()
Подвижность исследуемой группы получилась больше нуля, следовательно, она не является структурной группой, а представляет собой первичный (элементарный) механизм, с подвижностью равной единице.
Из проведенного анализа следует, что структурная схема механизма состоит из двух структурных групп звеньев и одного первичного механизма.
Так
как класс механизмов определяется классом наиболее сложной структурной группы,
то рассматриваемый рычажный механизм является механизмом 2-го класса, с
подвижностью равной единице.
2.2 Построения планов положений механизма
Перед выполнением кинематического анализа осуществляют метрический синтез механизма с помощью графоаналитического метода, т. е. определяют возможные угловые положения звеньев на плоскости или в пространстве. Результатом выполнения метрического синтеза является построенная кинематическая схема механизма и план положений механизма.
Для построения принимаем масштабный коэффициент длины µl=0.0025м/мм.
Далее переводят все геометрические линейные размеры в масштабный коэффициент длин и получают величины отрезков, изображающие заданные геометрические параметры в составе соответствующей кинематической схемы:
Используя полученные величины отрезков геометрических параметров механизма, методом засечек, строят его кинематическую схему.
Для
этого на плоскости произвольно выбираем точку А (центр вращения кривошипа)![]() . Из точки А отложим положение точки D и направляющию
движения ползуна.
. Из точки А отложим положение точки D и направляющию
движения ползуна.
С точки D проводим дугу DС и DЕ и получаем крайние точки С и Е. С точек Е дугой EF делаем засечки на направляющей и получаем положения точек F.
Соединяем
точки С и А. Замеряем отрезки ![]() и
и ![]()
Определяем
размеры кривошипа АВ и шатуна СВ.
Реальные размеры равны

Из
точки А![]() проводим окружность радиусом ВA
проводим окружность радиусом ВA![]() . С точки D проводим окружности DС и DЕ. Вычерчиваем
крайние положения механизма, когда кривошип АВ и шатун ВС вытянутся в одну
линию и получаем крайнюю точку - В0.
. С точки D проводим окружности DС и DЕ. Вычерчиваем
крайние положения механизма, когда кривошип АВ и шатун ВС вытянутся в одну
линию и получаем крайнюю точку - В0.
С точки В0 окружность ВА разбиваем на 12 частей в сторону угловой скорости и получаем положение точек В.
С точек В, радиусом ВС, делаем засечки на дуге DС и получаем положения точек С.
С точки D через точки С проводим прямые до пересечения с дугой DЕ и получаем положения точек Е.
С точек Е дугой FE делаем засечки на направляющей и получаем положение точек F.
Согласно заданию строим график сил полезного сопротивления и определяем силы сопротивления.
Масштабный
коэффициент равен
![]()
Результаты
заносим в таблицу 2.1.
Таблица 2.1 - Значения сил сопротивления в 12-ти положениях
|
Положение |
0 |
1 |
2 |
3 |
4 |
|
Ордината, мм |
0 |
0.05 |
0.2 |
9 |
22 |
|
Сила полезного сопротивления, Н |
0 |
4.4 |
17.54 |
789.3 |
1929.4 |
|
Положение |
5 |
6 |
7 |
8 |
9-12 |
|
Ордината, мм |
43 |
59 |
|
|
|
|
Силы полезного сопротивления, Н |
3771.1 |
5174.3 |
0 |
0 |
0 |