Материал: Подготовка и выполнение захода на посадку
На промежуточном этапе продолжается набор высоты, как правило, при полете по прямой. Он продолжается до первой точки, в кото-рой достигается и может выдерживаться высота пролета над препятствиями в 50 метров (164 фута). Линия пути этого этапа может быть изменена максимум на 15 относительно линии пути начального этапа ухода на второй круг. Предполагается, что на этом этапе экипаж начинает корректировать полет по линии пути.
Конечный этап начинается в точке, где впервые достигается и может выдерживаться высота пролета над препятствиями в 50 метров (164 фута) и продолжается до точки, в которой начинается новый заход на посадку, полет в зоне ожидания или возобновляется полет по маршруту. На этом этапе может предписываться выполнение разворотов.
Ширина зоны ухода на второй круг при наличии
радиолокационного контроля может быть расширена по 10 в обе стороны от
оси ВПП. Безопасная высота пролета над препятствиями в зоне ухода
устанавливается в 30 метров (100 футов).
.2 Способы инструментального захода на посадку
Способы инструментального захода на посадку изложены в документе 8168.
В международной практике наиболее часто применяются следующие способы инструментального захода на посадку:
Заход с прямой (Straight in Approach).
Обратная схема:
стандартный разворот (Procedure Turn);
обратный разворот (Base Turn).
Схема "Ипподром" (Race Track).
Заход по орбите (Arc in Orbit).
Векторение по локатору (Vectoring Approach).
Каждый из этих способов далее будет рассмотрен отдельно.
Особенности выполнения захода на посадку этими способами публикуются в полетных документах. Расчет схем захода на посадку производится с учетом индикаторных скоростей ВС на различных этапах захода. Выбор способов захода на посадку, а также их выполнение и публикация связаны со следующими правилами:
Все развороты при заходе на посадку должны выполняться с креном 25° (в США - 30°) или с угловой скоростью 3°/сек.
Если на схеме обозначено положение посадочных устройств, но не обозначены курсы и время полета, нужно пользоваться данными для нормальной (стандартной) схемы.
Если на схеме не указаны посадочные устройства, курсы и время полета, заход выполняется по расчету экипажа, но так, чтобы максимальное удаление ВС от ВПП не превышало 15 морских миль.
Если на схеме обозначены курсы и время полета, заход на посадку выполняется строго по указанной схеме.
В случаях, когда экипаж ВС сообщает диспетчерской службе, что схема захода на посадку и порядок ее выполнения на данном аэродроме ему незнакомы, диспетчерская служба должна сообщить:
Установленную начальную высоту захода на посадку.
Место начала разворота, обычно в минутах полета от навигационной точки.
Высоту начала разворота.
Высоту выхода из последнего разворота.
Сведения о посадочной прямой.
Заход с прямой. Основной и самый экономичный способ захода на посадку. Разрешается при подходе ВС к посадочному курсу под углом не более 30° и удалении от торца ВПП не более 25 морских миль. При выполнении захода данным способом экипаж обязан строго выполнять команды диспетчерской службы, особенно в вертикальной плоскости, зная при этом минимальные безопасные эшелоны и высоты в районе данного аэродрома.
Заход по орбите. Способ заключается в полете по окружности на определенной дальности по DME, со снижением до высоты не ниже указанной на схеме (обычно начальная высота выполнения схемы за-хода на посадку или высота входа в глиссаду), с целью вывода ВС в наивыгоднейшую точку разворота на прямую приближения с после-дующим полетом по прямой приближения для выполнения захода на посадку. Точка разворота на прямую приближения, как правило, маркируется радиалом от радионавигационного средства.
Векторение по локатору. Сущность этого метода заключается в том, что после пересечения границы или рубежа зоны векторения, экипаж ВС следует командам диспетчера, который сообщает требуемый курс полета и выводит, таким образом ВС в зону ±30° от посадочного курса. После "захвата" сигнала курсового маяка, векторение прекращается.
Глава 5. Визуальный заход на посадку
Основным методом захода на посадку в международных аэропортах является инструментальный. Однако не на всех аэродромах, оборудованных устройствами для инструментального захода на посадку, имеются схемы захода на посадку по приборам. Особенностью визуального захода на посадку является то, при выполнении его схемы "коробочка" экипаж обязан видеть ВПП в процессе всего захода.
Визуальный заход на посадку и полет по прямоугольному маршруту типа "коробочка" применяется крайне редко. Термин "заход на посадку по кругу" вообще означает выполнение визуального полета по кругу над аэродромом перед посадкой.
Заход на посадку по кругу представляет собой визуальный маневр в полете. Условия полета по кругу каждый раз бывают различными, поскольку они зависят от таких переменных факторов, как расположение ВПП, линия пути конечного этапа захода на посадку, скорость ветра и метеорологические условия. Следовательно, невозможно разработать единую схему, которая была бы пригодна для выполнения захода на посадку по кругу в любых условиях.
После установления первоначального визуального контакта с ориентирами основное допущение заключается в том, что среду ВПП (то есть порог ВПП или светотехнические средства захода на посадку или другую маркировку, относящуюся к ВПП) следует непрерывно держать в поле зрения при полете по кругу на MDA / H. Когда установлен надежный контакт с наземными ориентирами и экипаж решил совершить визуальный заход на посадку, он обязан сообщить об этом службе движения. При выполнении полета по кругу разрешается выполнять наиболее рациональные траектории полета в горизонтальном полете или со снижением с целью сокращения расстояния и экономии топлива. Если при установлении визуального контакта с землей доклад службе движения о визуальном контакте не производился, экипаж обязан выдерживать обязательные траектории.
Для выполнения визуального маневрирования
(визуального полета по кругу) устанавливается зона визуального маневрирования,
обозначаемая на диспетчерском радиолокаторе и ограниченная дугами, проведенными
из центров порогов каждой ВПП. Радиус дуги зависит от посадочной категории ВС,
рекомендуемой скорости ВС для захода на посадку для каждой категории, скорости
ветра (учитывается скорость 46 км/ч или 25 узлов) и радиуса разворота (со
средним креном 20° или угловой скоростью разворота 3°/сек)
независимо от величины угла разворота). Пример расчета радиуса зоны визуального
маневрирования представлен в таблице:
Таблица 6. Расчет радиуса визуального маневрирования
|
Категория ВС |
A |
B |
C |
D |
E |
|
Рекомендуемая скорость захода, км/ч |
185 |
250 |
335 |
380 |
445 |
|
Истинная воздушная скорость (ТАS) на высоте 600 м, км/ч |
241 |
310 |
404 |
448 |
516 |
|
r разворота, км |
1,28 |
2,08 |
3,46 |
4,31 |
5,76 |
|
n - прямоугольный участок (постоянная величина) |
0,56 |
0,74 |
0,93 |
1,11 |
1,30 |
|
R от порога ВПП, км R = 2r + n |
3,12 |
4,90 |
7,85 |
9,79 |
12,82 |
После установления зоны визуального
маневрирования (полета по кругу) определяется относительная / абсолютная высота
пролета препятствий (ОСА/Н) для каждой категории ВС:
Таблица 7. относительная / абсолютная высота пролета препятствий (ОСА/Н) по категории ВС
|
Категория ВС |
Запас высоты над препятствиями в м. (фт) |
Минимальная ОСА/Н над превышением аэродрома в м. (фт) |
Минимальная видимость в км (nm) |
|
A |
90 (295) |
120 (394) |
1,9 (1,0) |
|
B |
90 (295) |
150 (492) |
2,8 (1,5) |
|
C |
120 (394) |
180 (591) |
3,7 (2,0) |
|
D |
120 (394) |
210 (698) |
4,5 (2,5) |
|
E |
150 (492) |
240 (787) |
6,5 (3,5) |
Рисунок 24. Зона визуального маневрирования
В тех случаях, когда с учетом эксплуатационных соображений в соответствии с Приложением 6 к ОСА/Н прибавляется дополнительный запас, указывается MDA/H. Снижение до высоты, меньшей чем MDA/H, не производится до тех пор, пока:
Не будет установлен и поддерживаться визуальный контакт с ориентирами.
Экипаж не увидит порога ВПП и,
Не будет выдерживаться необходимый запас высоты над препятствиями и ВС не займет соответствующего положения для выполнения посадки.
Примечание. Данная схема не обеспечивает защиту от препятствий, когда ВС находится на высоте меньшей, чем MDA/H.
Если при полете по кругу для выполнения посадки по схеме захода на посадку по приборам теряется визуальный контакт с ориентирами, следует использовать такую схему ухода на второй круг, которая указана для данной конкретной схемы захода на посадку. Ожидается, что экипаж выполнит разворот с начальным набором высоты в направлении ВПП намеченной посадки и пролетит над аэропортом, где он выведет ВС на набор высоты по линии пути ухода на второй круг. Поскольку круговой маневр может выполняться более чем в данном направлении, потребуются различные схемы для выдерживания предписываемого курса ухода на второй круг, в зависимости от положения ВС в момент потери визуального контакта с ориентирами.
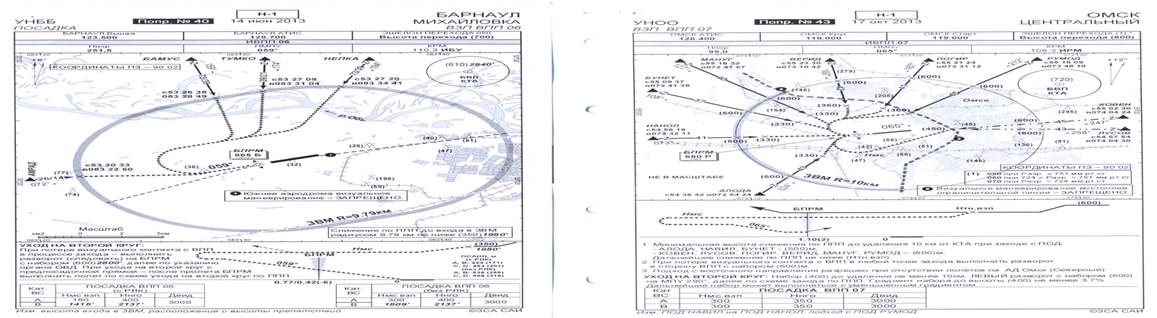
Рисунок 25. Схема посадки ПВП аэродрома Барнаул
(Михайловка)
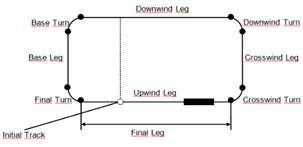
Рисунок 26. Схема визуального захода на посадку
.1 Характерные участки при выполнении захода на
посадку
Во всех способах захода на посадку, особенно при
выполнении визуального захода, различают следующие элементы (см. рисунок
27):Circutкруг полетов;Trackпуть начального подхода;Legпрямая полета против
ветра;Legпрямая полета поперек ветра;Turnразворот поперек ветра;Legпрямая
полета по ветру;Ternразворот по ветру;Legбазовая прямая;Turnбазовый разворот
(разворот на базовую прямую);Legпрямая окончательного захода;Turnпоследний
разворот (разворот на посадочную прямую.
.2 Запас высоты над препятствиями
При разработке каждой отдельной схемы захода на посадку рассчитывается абсолютная / относительная высота захода на посадку (ОСА/Н), которая указывается на карте захода на посадку по приборам. Абсолютной / относительной высотой пролета препятствий (ОСА/Н) является:
При выполнении точного захода на посадку наименьшая абсолютная высота (ОСА) или в других случаях наименьшая относительная высота над превышением порога (ОСН), на которой должен начаться уход на второй круг с тем, чтобы гарантировать соблюдение соответствующих критериев пролета препятствий.
При выполнении неточного захода на посадку наименьшая абсолютная / относительная высота (ОСА/Н), ниже которой ВС не может снижаться, не нарушив соответствующих критериев пролета препятствий.
Эксплуатационные минимумы рассчитываются путем добавления влияния ряда эксплуатационных факторов к ОСА/Н с тем, чтобы получить значение абсолютной / относительной высоты принятия решения DA/H в случае точного захода на посадку, или минимальной абсолютной/ относительной высоты снижения MDA/H в случае неточного захода на посадку.
5.3 Градиент набора и снижения
На картах SID и STAR, а также в указаниях службы воздушного движения дается градиент набора (снижения) (Climb / Descent Gradient). Он может быть выражен:
В приросте высоты на единицу расстояния, например 250 footper NM (футов в морскую милю).
В процентном отношении, например: Climb Gradient 4% означает набор с приростом высоты 40 метров на один километр расстояния.
Для перевода градиента в процентах в значение вертикальной скорости набора (снижения) можно использовать соответствующий график, переводную таблицу, или умножить поступательную скорость на градиент.
На схемах SID и STAR для перевода даются таблицы, в которых градиент набора (снижения) перерассчитывается по значению поступательной скорости в вертикальную скорость, выраженную в футах в минуту.
Глава 6. Заход на посадку с использованием различных
посадочных систем
Заход на посадку в международных аэропортах может выполняться по различным посадочным устройствам и системам:
Радиомаячным системам типа ILS.
Радиолокационным системам типа GCA.
Направленным радиомаякам типа VOR.
Приводным радиостанциям - NDB.
Радиопеленгаторам.
Все эти устройства могут применяться совместно с дальномерным оборудованием DME и светотехническим оборудованием аэродрома. Точность выдерживания направления при заходе на посадку с использованием различных посадочных устройств составляет:
(ILS ± 2,4°);
(VOR ± 5,2°);
(NDB ± 6,9°).
Для создания параметров курса и глиссады наибольшее распространение в настоящее время получили радиомаячные (РМС) и радиолокационные (РСП) системы посадки.
РМС являются основными системами выполнения захода на посадку, так как, обладая высокой точностью и устойчивостью работы, обеспечивают непосредственную индикацию положений линий курса и глиссады снижения на приборах ВС и позволяют автоматизировать заход на посадку.
РСП являются дополнительными системами захода на посадку и используются для контроля за ВС, выполняющими заход на посадку, захода на посадку ВС, не оборудованных ILS, и как резервные системы на случай отказа других посадочных устройств. На некоторых аэродромах РСП являются основными системами захода на посадку.
6.1 Заход на посадку по системе ILS
Согласно Стандартам ИКАО система ILS имеет следующую классификацию по категориям (в зависимости от технических возможностей), которые используются при определении посадочных минимумов при заходе на посадку по системе ILS:
ИЛС - категория I:не более 200 футов (60м);не более 2400 футов (800м);не более 1800 футов (550м);
ИЛС - категория II (требуется специальное разрешение):не менее 200 футов (60м), но не более 100 футов (30м);не более 1200 футов (350м);
ИЛС - категория III (требуется специальное
разрешение):менее 100 футов (30м) или без DH;не менее чем 700 футов
(200м);менее 50 футов (15м) или без DH;менее чем 700 футов (200м), но не более
150 ф. (50м);и RVR не требуются.
Кроме того существует классификация FAA:
ИЛС - категория I:не менее 200 футов (60м);не менее 1800 футов (550м);
ИЛС - категория II (требуется специальное разрешение):не менее 100 футов (30м);не менее 1200 футов (350м);
ИЛС - категория III (требуется специальное разрешение):не требуется;не менее 700 футов (200м);не требуется;не менее 150 футов (50м);и RVR не требуются.
Заход на посадку осуществляется следующим способом.
Первоначальный выход в район аэродрома и построение маневра захода на посадку осуществляются , как правило, по другим навигационным средствам.