Материал: part03
Page 196 DICOM PS3.3 2020a - Information Object Definitions
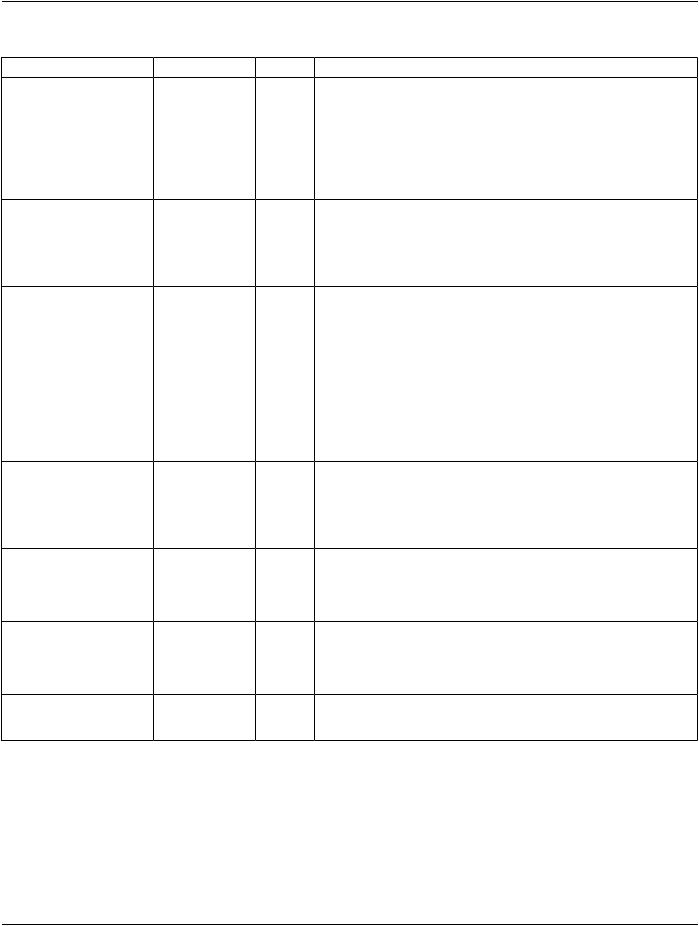
Table 10.38-1. Outline Definition Macro Attributes
Attribute Name |
Tag |
Type |
Attribute Description |
Outline Shape Type |
(0018,1630) |
1 |
Type of shape of the outline. |
|
|
|
Enumerated Values: |
|
|
|
RECTANGULAR |
|
|
|
CIRCULAR |
|
|
|
POLYGONAL |
|
|
|
See Section 10.38.1.1. |
Outline Left Vertical Edge |
(0018,1631) |
1C |
X-coordinate in mm of the left edge of the rectangular outline (parallel to |
|
|
|
the y-axis of the coordinate system). |
|
|
|
Required if Outline Shape Type (0018,1630) is RECTANGULAR. |
|
|
|
See Section 10.38.1.2. |
Outline Right Vertical Edge |
(0018,1632) |
1C |
X-coordinate in mm of the right edge of the rectangular outline (parallel |
|
|
|
to the y-axis of the coordinate system). |
|
|
|
Required if Outline Shape Type (0018,1630) is RECTANGULAR. |
|
|
|
See Section 10.38.1.2. |
Outline Upper Horizontal |
(0018,1633) |
1C |
Y-coordinate in mm of the upper edge of the rectangular outline (parallel |
Edge |
|
|
to the x-axis of the coordinate system). |
|
|
|
Required if Outline Shape Type (0018,1630) is RECTANGULAR. |
|
|
|
See Section 10.38.1.2. |
Outline Lower Horizontal |
(0018,1634) |
1C |
Y-coordinate in mm of the lower edge of the rectangular outline (parallel |
Edge |
|
|
to the x-axis of the coordinate system). |
|
|
|
Required if Outline Shape Type (0018,1630) is RECTANGULAR. |
|
|
|
See Section 10.38.1.2. |
Center of Circular Outline |
(0018,1635) |
1C |
Location (x,y) in mm of the center of the circular outline. |
|
|
|
Required if Outline Shape Type (0018,1630) is CIRCULAR. |
|
|
|
See Section 10.38.1.2. |
Diameter of Circular Outline |
(0018,1636) |
1C |
Diameter in mm of the circular outline. |
|
|
|
Required if Outline Shape Type (0018,1630) is CIRCULAR. |
|
|
|
See Section 10.38.1.2. |
Number of Polygonal |
(0018,1637) |
1C |
Number of Vertices in Vertices of the Polygonal Outline (0018,1638). |
Vertices |
|
|
Required if Outline Shape Type (0018,1630) is POLYGONAL. |
|
|
|
- Standard -
|
DICOM PS3.3 2020a - Information Object Definitions |
Page 197 |
||
Attribute Name |
Tag |
Type |
Attribute Description |
|
Vertices of the Polygonal |
(0018,1638) |
1C |
A data stream of pairs of x and y in mm. Polygonal outlines are implicitly |
|
Outline |
|
|
closed from the last vertex to the origin vertex and all edges shall be |
|
non-intersecting except at the vertices. Any given vertex shall occur only once in the data stream.
Required if Outline Shape Type (0018,1630) is POLYGONAL.
The number of pairsin this data stream shall equal the value ofNumber of Polygonal Vertices (0018,1637).
See Section 10.38.1.2.
10.38.1 Outline Definition Macro Attribute Description
10.38.1.1 Outline Shape Type
When outline shape is a rectangle or a circle per design, the Outline Shape Type (0018,1630) shall have the value RECTANGULAR or CIRCULAR respectively and the outline shall not be represented as a polyline.
10.38.1.2 Coordinate Definitions
The values are defined in a plane that is declared in the invocation of the Macro.
10.39 Patient to Equipment Relationship Macro
The Patient to Equipment Relationship Macro describes a position of the patient with respect to a device. The position is defined by means of a transformation matrix between a Patient Frame of Reference and an Equipment Frame of Reference.
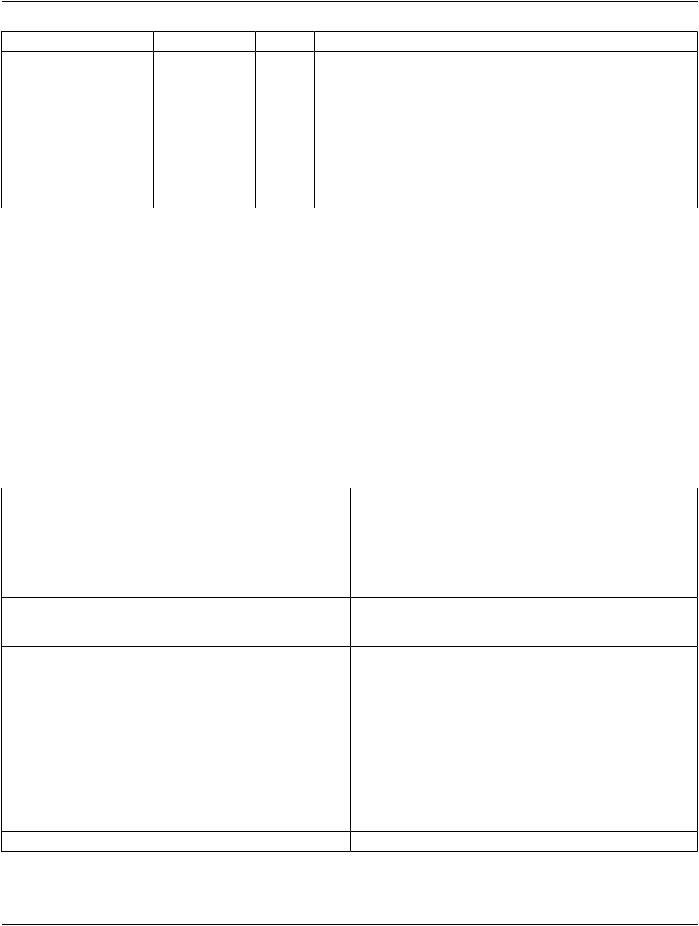
Table 10.39-1. Patient to Equipment Relationship Macro Attributes
Attribute Name |
Tag |
Type |
Attribute Description |
Image to Equipment Mapping |
(0028,9520) |
1 |
A rigid, homogeneous 4x4 transformation matrix that maps the |
Matrix |
|
|
patient coordinate space in the Frame of Reference used for the |
|
|
|
patient model to the coordinate system defined by the equipment. |
|
|
|
Matrix elements shall be listed in row-major order. |
|
|
|
SeeSection10.39.1.1,Section10.39.1.2andSectionC.7.6.21.1. |
Frame of Reference |
(3006,00C8) |
3 |
Comments entered by a human operator about the relationship |
Transformation Comment |
|
|
between the patient frame of reference and the equipment. For |
|
|
|
display purposes only, shall not be used for other purposes. |
Patient Location Coordinates |
(3006,00C9) |
2 |
Specific points in the patient coordinate system which further |
Sequence |
|
|
characterize the position of the patient with respect to the |
|
|
|
equipment. |
|
|
|
Zero or more Items shall be included in this Sequence. |
>3D Point Coordinate |
(0068,6590) |
1 |
Coordinate (x,y,z) in mm describing the location in the patient |
|
|
|
Frame of Reference that will be transformed to the Equipment |
|
|
|
Frame of Reference by using the Image to Equipment Mapping |
|
|
|
Matrix (0028,9520). |
>Patient Location Coordinates |
(3006,00CA) |
1 |
Identifies the type of Patient Location Coordinate. |
Code Sequence |
|
|
One or more Items shall be included in this Sequence. |
|
|
|
|
>>Include Table 8.8-1 “Code Sequence Macro Attributes”. |
CID is defined by invocation. |
||
- Standard -
Page 198 |
DICOM PS3.3 2020a - Information Object Definitions |
||
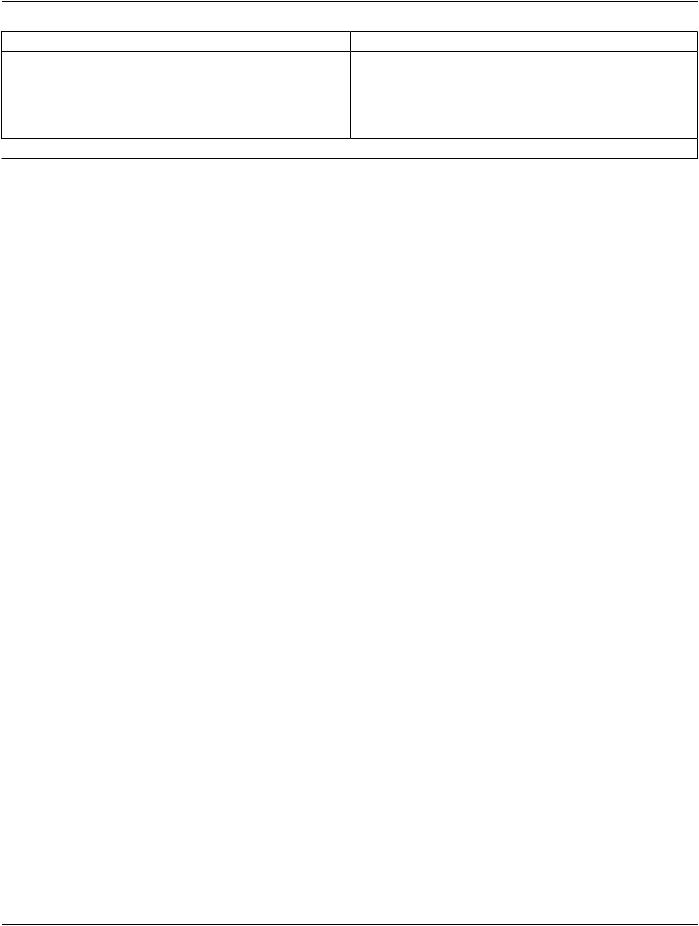
Attribute Name |
Tag |
Type |
Attribute Description |
Patient Support Position |
(3006,00CB) |
2 |
Actual Patient Support Position parameters. Shall be consistent |
Sequence |
|
|
with the Image to Equipment Mapping Matrix (0028,9520). |
See Section 10.39.1.2.
Zero or one Item shall be included in this Sequence.
 >Include Table 10.40-1 “Patient Support Position Macro Attributes”.
>Include Table 10.40-1 “Patient Support Position Macro Attributes”.
10.39.1 Patient to Equipment Relationship Macro Attributes Description
10.39.1.1 Equipment Coordinate System
A piece of equipment has an Equipment Coordinate System which can be used for expressing geometric concepts such as locations andorientations.Thecoordinatesystemischaracterizedbythelocationoftheoriginandtheorientationofcoordinateaxeswithrespect to the equipment. The Equipment Coordinate System is a right-handed coordinate system.
Equipment Coordinate Systems are typically based on a standardized definition of axes. The choice of origin is often device-specific or device-type-specific. It may be any significant location on the machine such as the manufacturer-dependent machine isocenter.
The Equipment Coordinate System can be used as the parent for derived coordinate systems.
10.39.1.2 Image to Equipment Mapping Matrix and Patient Support Position Macro
The Image to Equipment Mapping Matrix (0028,9520) describes the relationship between the Patient-oriented coordinate system and an Equipment Coordinate System. This matrix AM Bdescribes a rigid transformation of a point ( Bx, By, Bz) with respect to the Patient coordinate system into ( Ax, Ay, Az) with respect to the Equipment Coordinate System as defined in Section C.7.6.21.1.
The Equipment Coordinate System is identified by the Equipment Frame of Reference UID (300A,0675). For further information on the definition of the Equipment Frame of Reference, see Section 10.39.1.1. The patient-oriented coordinate system is identified by the Frame of Reference UID (0020,0052) of the SOP Instance it is used within. Both coordinate systems are expressed in millimeters.
The Patient Support Position Macro invoked by Patient Support Position Sequence (3006,00CB) allows the exchange of device- specific parameters for the patient support device. Applications designed to guide a specific patient support device will be able to de- compose the transformation into device-specific parameters or derive a transformation matrix out of these parameters. Applications that are unable to know the decomposition of the transformation to those parameters and vice versa will still be able to display the native labels and numerical values of those parameters to human readers.
The Patient Support Position Sequence (3006,00CB) may be present to annotate the matrix and display the decomposed matrix contents. The content of the Patient Support Position Macro shall be used for display purposes only. It shall not be used for other purposes. The content of this Macro shall not be used as a substitute for the Image to Equipment Mapping Matrix (0028,9520). In general,thereismorethanonewaytoreachthepointinspacethatisdescribedbytheImagetoEquipmentMappingMatrix(0028,9520). Hence it is explicitly not implied how this position is reached.
In some cases (e.g., emergency treatments in Radiotherapy), the Patient Frame of Reference is not defined by an image series. In this case an arbitrary Frame of Reference is used for the patient coordinate system in the Frame of Reference Module of the SOP instance. The Image to Equipment Mapping Matrix (0028,9520) has the same meaning as in the case of image-based Patient Frame of Reference.
If the Image to Equipment Mapping Matrix (0028,9520) and the Patient Support Position Sequence (3006,00CB) are both present, the information in both locations shall be consistent.
10.40 Patient Support Position Macro
This Macro provides the device-specific geometric settings for the Patient Support device.
The information is intended for display to human readers and to support non-image-based patient positioning; however, the definition of the patient position with respect to the device is contained in the Image to Equipment Mapping Matrix (0028,9520).
- Standard -
DICOM PS3.3 2020a - Information Object Definitions Page 199
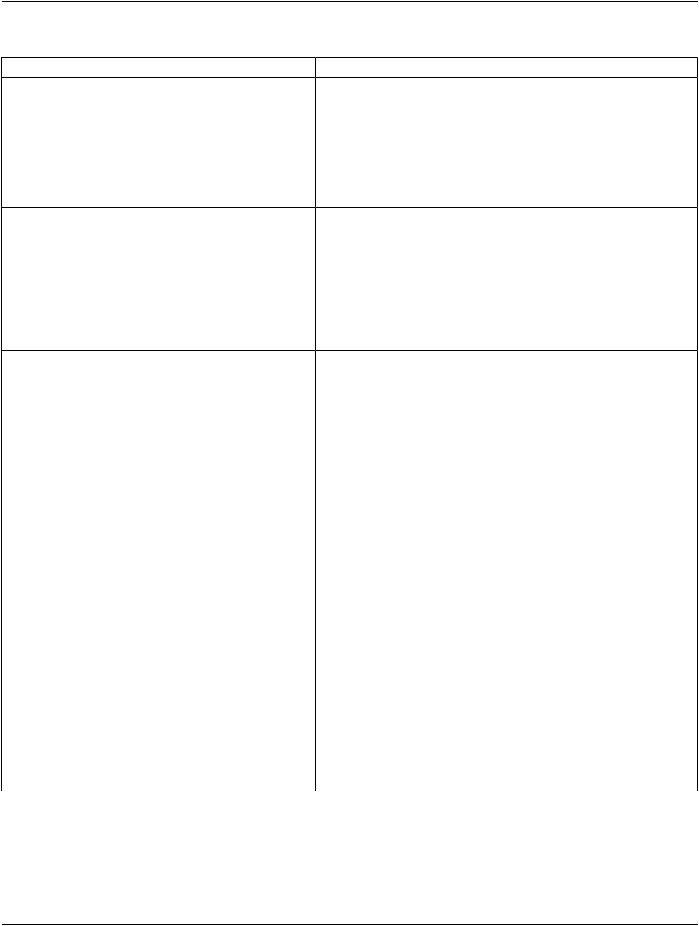
Table 10.40-1. Patient Support Position Macro Attributes
Attribute Name |
Tag |
Type |
|
Attribute Description |
Patient Support Position |
(300A,065C) |
1 |
Method of specification for patient support parameters. |
|
Specification Method |
|
|
Enumerated Values: |
|
|
|
|
||
|
|
|
ABSENT |
lNo parameters are specified. |
|
|
|
GLOBAL |
Parameters are specified using a globally known |
|
|
|
|
method, irrespective of the device in use. |
|
|
|
DEVICE_SPECIFICParameters are specified using a device-specific |
|
|
|
|
|
method. |
Patient Support Position |
(300A,065D) |
1C |
Translational and rotational parameters for Patient Support devices. |
|
DeviceParameterSequence |
|
|
Required if Patient Support Position Specification Method (300A,065C) |
|
|
|
|
||
|
|
|
does not equal ABSENT. |
|
|
|
|
One or more Items shall be included in this Sequence if Patient Support |
|
|
|
|
Position Specification Method (300A,065C) equals DEVICE_SPECIFIC. |
|
|
|
|
Only one Item shall be included in this Sequence if Patient Support |
|
|
|
|
Position Specification Method (300A,065C) equals GLOBAL. |
|
>Referenced Device Index |
(300A,0607) |
1C |
The value of Device Index (3010,0039) in Patient Support Devices |
|
|
|
|
Sequence (300A,0686) corresponding to the Patient Support Device in |
|
|
|
|
use. |
|
|
|
|
Required if Patient Support Position Specification Method (300A,065C) |
|
|
|
|
equals DEVICE_SPECIFIC. |
|
>Device Order Index |
(300A,065E) |
1C |
IndexdefiningtheorderinwhichtheItemsinthePatientSupportPosition |
|
|
|
|
Device Parameter Sequence (300A,065D) are applied. |
|
|
|
|
The value shall start at 1 and increase monotonically by 1. |
|
|
|
|
Required if Patient Support Position Specification Method (300A,065C) |
|
|
|
|
equals DEVICE_SPECIFIC. |
|
|
|
|
See Section 10.40.1. |
|
>Patient Support Position |
(300A,065B) |
1 |
Translational and rotational parameters for a particular Patient Support |
|
Parameter Sequence |
|
|
device. |
|
|
|
|
One or more Items shall be included in this Sequence. |
|
>>Patient Support Position |
(300A,065F) |
1C |
IndexdefiningtheorderinwhichtheItemsinthePatientSupportPosition |
|
Parameter Order Index |
|
|
Parameter Sequence (300A,065B) are applied. |
|
|
|
|
The value shall start at 1 and increase monotonically by 1. |
|
|
|
|
Required if Patient Support Position Specification Method (300A,065C) |
|
|
|
|
equals DEVICE_SPECIFIC. |
|
|
|
|
See Section 10.40.1. |
|
>>Include Table 10-2 “Content Item Macro Attributes |
DTID 15302 “Patient Support Position Parameters”. |
|||
Description”. |
|
|
|
|
10.40.1 Position Parameters and Order Index
The Device Order Index (300A,065E) and thePatient Support Position Parameter Order Index (300A,065F) are applied sequentially, meaning all the Items in a Patient Support Position Parameter Sequence (300A,065B) are applied before proceeding to the Item in the Patient Support Position Device Parameter Sequence (300A,065D) specified by the next Device Order Index (300A,065E) value.
- Standard -
Page 200 |
DICOM PS3.3 2020a - Information Object Definitions |
A vendor may specify codes that are not included in TID 175001 and/or a set of codes which is not identical with the set defined in Section 10.40.1.1 or Section 10.40.1.2. The vendor shall document the codes used in this Macro in the Conformance Statement, as well as the corresponding parameters, their geometric interpretation, and the order in which they will be applied. These parameters shall use UCUM units of mm for lengths and degrees for angles.
10.40.1.1 IEC 61217 Patient Support Device
Devices using the IEC 61217 coordinate systems to define geometric settings for the Patient Support device shall use the codes in Table 10.40-2 in the order specified in column Patient Support Position Parameter Order Index (300A,065F). Other codes shall not be used.
Table 10.40-2. Isocentric Patient Support Position Parameter Order Index
Code Value (0008,0100) |
Code Meaning (0008,0104) |
Patient Support Position |
|
|
Parameter Order Index |
|
|
(300A,065F) |
126801 |
IEC61217 Patient Support Continuous Yaw Angle |
1 |
126806 |
IEC61217 Table Top Lateral Position |
2 |
126807 |
IEC61217 Table Top Longitudinal Position |
3 |
126808 |
IEC61217 Table Top Vertical Position |
4 |
126802 |
IEC61217 Table Top Support Continuous Pitch Angle |
5 |
126803 |
IEC61217 Table Top Support Continuous Roll Angle |
6 |
10.40.1.2 Isocentric Patient Support Device
DevicesusinganisocentricrepresentationtodefinegeometricsettingsforthePatientSupportdeviceshallusethecodesinTable10.40- 3 in the order specified in column Patient Support Position Parameter Order Index (300A,065F). Other codes shall not be used.
Table 10.40-3. Isocentric Patient Support Position Parameter Order Index
Code Value (0008,0100) |
Code Meaning (0008,0104) |
Patient Support Position |
|
|
Parameter Order Index |
|
|
(300A,065F) |
126814 |
Isocentric Patient Support Continuous Yaw Angle |
1 |
126812 |
Isocentric Patient Support Continuous Pitch Angle |
2 |
126813 |
Isocentric Patient Support Continuous Roll Angle |
3 |
126815 |
Isocentric Patient Support Lateral Position |
4 |
126816 |
Isocentric Patient Support Longitudinal Position |
5 |
126817 |
Isocentric Patient Support Vertical Position |
6 |
- Standard -