Материал: Основи вищої геодезії. Навчальний посібник. Літнарович
де НR – ортометрична висота точки К, або віддаль від даної точки до геоїда; N – висота геоїда над референц-еліпсоїдом для точки К.
Сьогодні основною задачею вищої геодезії вважають визначення координат точок фізичної поверхні Землі, і
К |
К К |
Н |
= Н q + ; (18.2) |
де Hq – нормальна висота або висота даної точки над квазігеоїдом, К – висота квазігеоїда над референц-еліпсоїдом в точці К. Квазігеоїд - деяка допоміжна рівнева поверхня, близька до геоїда. Молоденький ввів поняття нормальних висот і його теорія знайшла визнання у вищій геодезії як теорія Молоденького. Ортометричну висоту НR або нормальну висоту називають гіпсометричною частиною геодезичної висоти. N і - геоїдальна частина геодезичної висоти. Повні висоти Н можна визначати геометричним методом без даних про гравітаційне поле (вимірювати зенітні віддалі, але вони викривлені рефракцією). Тому гіпсометричні і геоїд альні висоти не можуть бути визначені окремо геометричним методом, необхідно враховувати дані вимірювання сили тяжіння. Основні дані для обчислення гіпсометричних висот одержують геометричним нівелюванням і вимірюванням сили тяжіння. Силові лінії завжди ортогональні до рівневою поверхні.
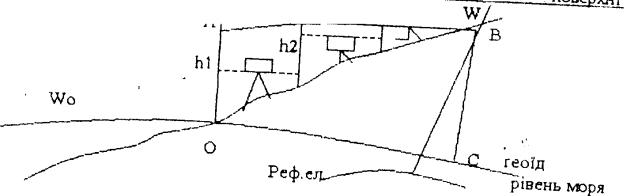
Рис 18.2 Гіпсометричні висоти О – вихідний пункт державного нівелювання (Кронштадт). ОА, ВС – силові
лінії гравітаційного поля Землі. h1, h2, h3 – віддалі між рівневими поверхнями, які проходять через суміжні точки стояння рейок. Вважаючи, що відстані між рейками невеликі, а виміри виконані безпомилково, то висота точки В відносно точки О буде:
HвBkm h1 h2 h3;
B
HвBkm dh;
0
При умові, що відстані між рейками безконечно малі. dh - елементарний нівелірний приріст.
126
Рівневі поверхні і потенціали сили Землі не паралельні між собою. Непаралельність рівневих поверхонь призводить до того, що виміряна висота якої-небудь точки залежить від лінії нівелювання
1 шлях О С В; 2 шлях О А В. Шлях О С ніяких перевищень не дасть.
HвBkm CB; |
HвBkm OA; |
CB OA; |
Тому що рівневі поверхні не паралельні. Вимірювання безпомилкові, а результати різні. В замкнутому полігоні виникають теоретичні нев’язки, які слід враховувати при врівноваженні полігонів.
fтеор hвмк
Тобто теоретична нев’язка дорівнює сумі виміряних перевищень в замкнутому полігоні вільної від всяких помилок мережі.
Таким чином, система виміряних висот не є однозначною системою і у виміряні висоти слід ввести поправки, щоб вони не залежали від лінії нівелювання.
В залежності від практичного використання є 3 однозначних системи гіпсометричних висот: ортометричні, нормальні і динамічні.
18.2. Ортометричні висоти.
Ортометричною висотою точки В називається довжина силової лінії гравітаційного поля Землі від цієї точки до геоїда СВ = Нr. Цю відстань можна брати по прямовисній лінії і по нормалі до прийнятого референц-еліпсоїда, але обов’язково від даної точки до геоїда
HrB |
1 |
W0 W B 18.3 |
|
gmB |
|||
|
|
де WO – потенціал сили тяжіння на геоїді; W – величина потенціалу в даній точці; (WO –W – різниця між потенціалами (геопотенціал); gm – середнє значення дійсного прискорення сили тяжіння вздовж силової лінії ВС
Ортометрична висота не залежить від лінії нівелювання, тому що потенціал є функція просторових координат.
B B
W0 W B gdh g1 h1
0 0
де dh – елемент нівелірного перевищення; g – прискорення сили тяжіння в мінливій точці нівелювання в місцях встановлення рейок g1, g2, g3.
Загальний вираз:
|
1 |
B |
|
HrB |
gdh; 18.5 |
||
B |
|||
|
gm |
0 |
g gmB g gmB
127
|
1 |
B |
B |
1 |
B |
|
HrB |
gmB g gmB dh dh |
g gmB dh; 18.5 |
||||
B |
B |
|||||
|
gm 0 |
0 |
gm |
0 |
||
Враховуючи, що dh є сумою безпосередньо виміряних переміщень
B
dh HвкмB ;
0
Одержимо:
HrB HвкмB |
|
1 |
B |
g gmB dh; 18.6 |
|
|
|
||||
B |
|||||
|
|
gm 0 |
|
||
Другий член правої частини (18.6) називається ортометричною поправкою і є поправкою виміряної висоти. Вона залежить від сили тяжіння вздовж ліній нівелювання.
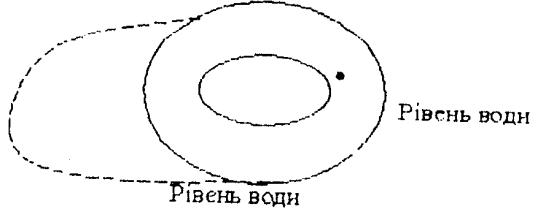
Недолік системи ортометричних висот в тому, що ми не можемо точно обчислити ортометричну поправку (не знаємо gm в середині Землі). Систему ортометричних висот не можна використовувати в гідротехнічному будівництві.
Рис 18.3 Помилка при використанні системи ортометричних висот в гідротехнічному будівництві
18.3. Нормалі висоти.
Для системи нормальних висот справедлива формула:
|
|
1 |
|
|
1 |
B |
HqB |
|
|
W0 |
WB |
|
gdh; 18.7 |
b |
b |
|||||
|
|
m |
|
|
m 0 |
|
Розглянемо гравітаційне поле Землі. Силові лінії гравітаційного поля спрямовані по нормалі в даній точці.
Параметрами поверхні нормального еліпсоїда є: а, , е , w.Формула нормального розподілу сили тяжіння на еліпсоїді:
128
0B e 1 sin2 B 1 sin2 2 B ; 18.8
де е – нормальне прискорення сили тяжіння на екваторі нормального еліпсоїда, а 0 – на поверхні еліпсоїда в точці Во з широтою φв , і 1 – числові параметри.
Рис 18.4 Нормальне прискорення сили тяжіння в середній точці
|
|
|
|
h |
H Bвим |
; 18.9 |
||
mB |
0B |
|
|
|
вим |
0B 0.3086 |
|
|
|
2 |
2 |
||||||
|
|
|
H |
|
|
|||
де 0, 3086 – вертикальний градієнт нормальної сили тяжіння в млг/м;, Н – вертикальний градієнт Н в метрах.
Спочатку проводимо нівелювання, а потім беремо gdh і обчислюємо m. Спочатку вводиться поняття нормальної висоти, а потім поняття квазігеоїда.
Рис 18.5 Силові лінії
Якщо розрахувати нормальні і ортометричні висоти і знайти їх середнє значення, то максимальне відхилення висот від їх середнього арифметичного значення буде становити 2 – 2,5 метра в горах і декілька сантиметрів в рівнинній місцевості. Для використання системи нормальних висот не потрібно знати внутрішню будову Землі.
Таким чином:
129

HqB HвимB |
1 B |
g mB dh; 18.10 |
|
|
|
||
B |
|||
|
m 0 |
|
|
gmB g mB ; 18.11
18.4.Динамічні висоти.
Динамічні висоти Hg розраховуються по формулі:
HgB W0 45W B B gdh; 18.12
0 0
де 0 – прискорення нормальної сили тяжіння на нормальному еліпсоїді на широті 45 .
Різниця потенціалів ділиться на постійну величину. Динамічні висоти не залежать від шляху нівелювання і однакові для точок однієї і тієї ж рівневою поверхні. Використовуються там, де вивчають рівневі поверхні (гідротехнічне будівництво), берегова лінія водного басейну. Для динамічних висот не можна вказати яку-небудь поверхню відліку. Вони показують значення геопотенціалу в даній точці, яке виражене в лінійних величинах. Вказані формули застосовують при обробці нівелювання 1 класу. Висоти реперів II, III, IV класів отримують в тій системі, в якій взяті вихідні опорні репери.
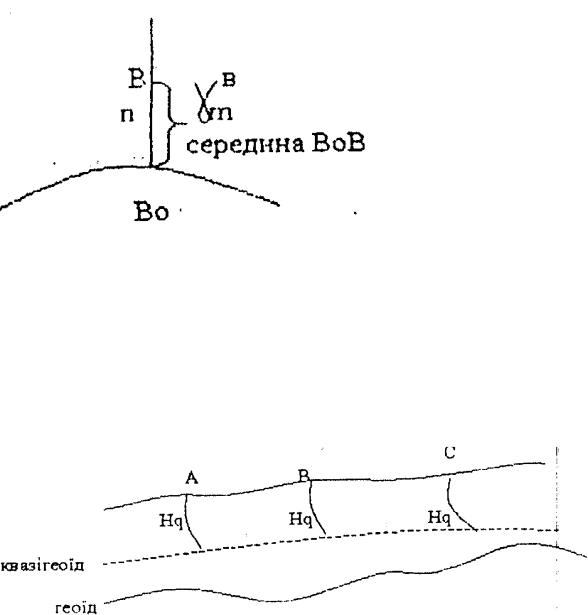
18.5. Визначення геоїдальних висот. Астрономічне нівелювання.
Астрономічне нівелювання – один з методів регіонального вивчення фігури геоїда або квазігеоїда (не в глобальному масштабі, а в даній області материка).
Суть астрономічного нівелювання полягає в побудові профілів геоїда або квазігеоїда відносно відлікової поверхні по відносним відхиленням виска і відстаням між пунктами.
Точність астрономічного нівелювання на порядок нижча геометричного нівелювання (в 5-10 разів). Зараз практично не відрізняють визначення фігури геоїда і квазігеоїда. На земній поверхні розглянемо пункти А, В, С, Д, для яких відомі геодезичні координати В, L і астрономічні φ, λ і в той же час це астропункти. Через А, В, С, Д проведені нормалі до референц-еліпсоїда. В цих же точках показані проекції прямовисних ліній на площину вибраного профілю. Оа, Ов, Ос, Од – складові відхилення виска в напрямку вибраного профілю на фізичній поверхні Землі.
130