Материал: Опорный конспект__Электротехника
|
n1 − n2 |
|
|
n1 |
− n2 |
|
|
|
|
|
|
|
|
|
|
|||
s = |
, |
s = |
×100% ; s |
кр |
= s (l + l2 |
-1) ; |
||||||||||||
|
|
|
|
|||||||||||||||
|
|
n1 |
|
|
n1 |
|
|
ном |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
n = |
60 f1 |
; n = n (1 - s) = |
60 f1 |
|
(1 - s) , n = |
60 f |
. |
|||||||||||
|
|
|
||||||||||||||||
1 |
|
p |
2 |
1 |
|
p |
1 |
|
p |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Частота тока и ЭДС, наводимая магнитным полем статора в проводниках статора и ротора:
f |
2 |
= sf = s |
pn1 |
; |
E |
= 4,44 f w Ф |
m |
k |
01 |
; |
|
|
|||||||||||
|
1 |
60 |
|
1 |
1 1 |
|
|
|
|||
E2 = 4,44 f2w2Фmk02; |
E2s |
= sE2. |
|||||||||
Мощности, КПД и вращающий момент:
|
|
|
|
P = 3I1фU1ф cos j = |
3 |
U1I1 cos j; |
|
|
|
||||||||||
|
|
|
|
Q = 3I1фU1ф sin j = |
|
U1I1 sin j; |
|
|
|
||||||||||
|
|
|
|
3 |
|
|
|
||||||||||||
|
|
P |
|
P − ∑ p |
|
∑ p |
|
|
|
|
P |
|
|
P |
|
|
|
||
h = |
2 |
= |
1 |
|
|
= 1 - |
, |
h = |
2 |
= |
2 |
|
; |
|
|||||
P |
P |
P |
|
|
|
||||||||||||||
|
|
|
|
P |
|
|
|
|
|
|
(P + ∑ p) |
|
|||||||
|
|
1 |
|
1 |
|
|
|
1 |
|
|
|
|
1 |
|
|
2 |
|
|
|
|
= Р - Dр = |
|
U I cos j - (P |
+ Р |
|
) = w М = |
Р2э |
, |
|||||||||||
P |
3 |
|
|||||||||||||||||
|
|
||||||||||||||||||
эм |
|
1 |
|
1 |
|
|
1 1 |
|
1э |
|
1м |
|
1 |
s |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Р2 = Р1 − ∑ р = Р1 − ( р1э + р1м + р2э + р2м + рмх + рд),
Р2 = ηР1, |
|
|
Р2 = Рэм(1 − s) = Mω2 , P2 = Mn2 / 9,55; |
|||||||||||||
|
M = 9,55P / n , |
M = |
3E2I2 cos ϕ2 |
, |
|
|
||||||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
2 |
2 |
|
|
|
w1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M = C |
M |
I |
2s |
Ф |
m |
cosϕ |
, |
M = C U |
2 |
, М = |
Рэм |
= |
9,55Р1 |
. |
||
1 |
|
|
||||||||||||||
|
|
|
2 |
|
1 |
|
w |
|
|
n1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Зависимость момента от скольжения:
M= 2M max
s + sкр
sкр s
Кратность пускового тока, пускового момента и максимального момента:
kI = |
I п |
, kМ = |
Мп |
, |
l = |
Мmax |
|
|
M ном |
||||
|
I ном |
Мном |
|
|||
22
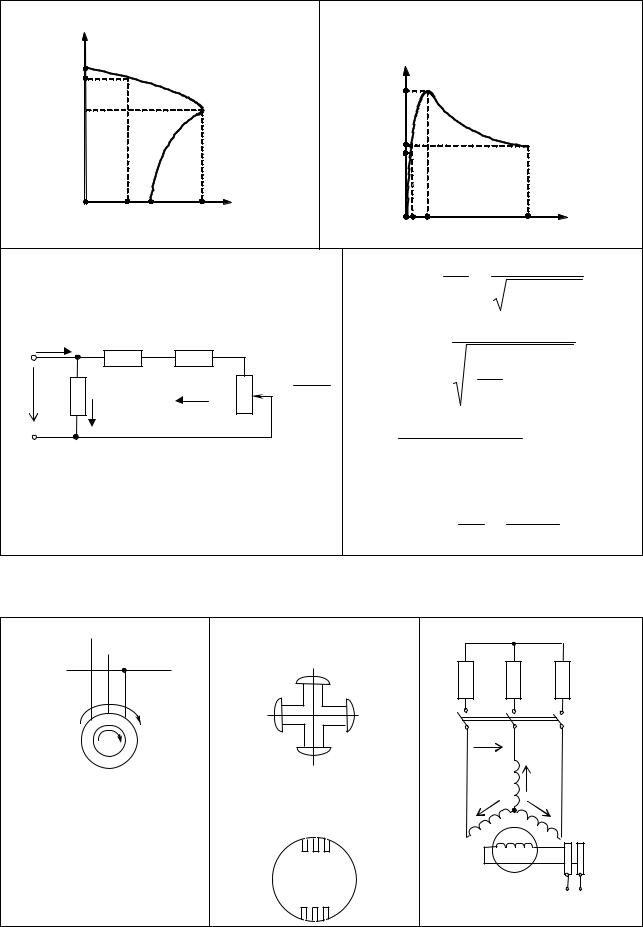
Механическая характеристика |
Характеристика «Момент- |
|
|
|
|
|||||||||||
n0 |
n |
|
|
скольжение» |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
nн |
|
|
|
Mкр |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
nкр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
Mн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mmax |
|
|
|
|
|
|
|
|
s |
|
|
|
||
0 |
Mн Mп |
|
|
0 sн sкр |
|
1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Г- образная схема замещения |
|
|
I2 |
= E2 = |
E2 |
|
2 |
|
|
|||||||
|
|
|
Z2 |
|
R2 |
+ X |
|
|
||||||||
асинхронного двигателя |
|
|
|
|
|
|
|
2 |
|
|
2 |
|
|
|
||
& |
Z1 |
Z ′2 |
|
|
|
I2s = |
|
|
E2 |
|
|
|
, |
|
|
|
I1 |
R′ 1− s |
|
|
R |
2 |
|
|
|
|
|
||||||
|
Z12 |
I&′ |
|
|
|
|
2 |
|
|
|
||||||
& |
|
|
|
|
2 |
+ X 2 |
|
|
|
|
||||||
U1 |
|
2 |
2 |
s |
|
|
|
|
s |
|
|
|
|
|
|
|
|
I&0 |
|
|
R |
= |
M |
ном |
(n − n ) |
X |
|
|
= X |
|
s |
||
|
|
|
|
|
1 |
|
2 , |
2s |
2 |
|||||||
|
|
|
|
2 |
|
9,55m I |
2 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
2 |
2ном |
|
|
|
|
|
|
|
|
|
|
|
|
Коэффициент приведения |
|
|
|||||||||
|
|
|
|
|
|
|
n = E1 = k01w1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
E2 |
k02w2 |
|
|
|
|
|
||
7.2. Синхронные машины
А В
В 
С
n1
n2
n1=n2
n1-частота вращения магнитного поля; n2-частота вращения ротора
Ротор |
Синхронная машина |
|||
явнополюсный |
|
|
|
|
|
Z |
C |
ZA |
Z |
|
|
|
B |
|
|
U |
|
|
|
|
|
|
& |
|
|
|
|
EA |
|
|
& |
|
& |
|
Ротор |
EC |
|
||
|
|
EB |
|
|
неявнополюсный |
|
|
|
|
|
|
|
- |
+ |
23
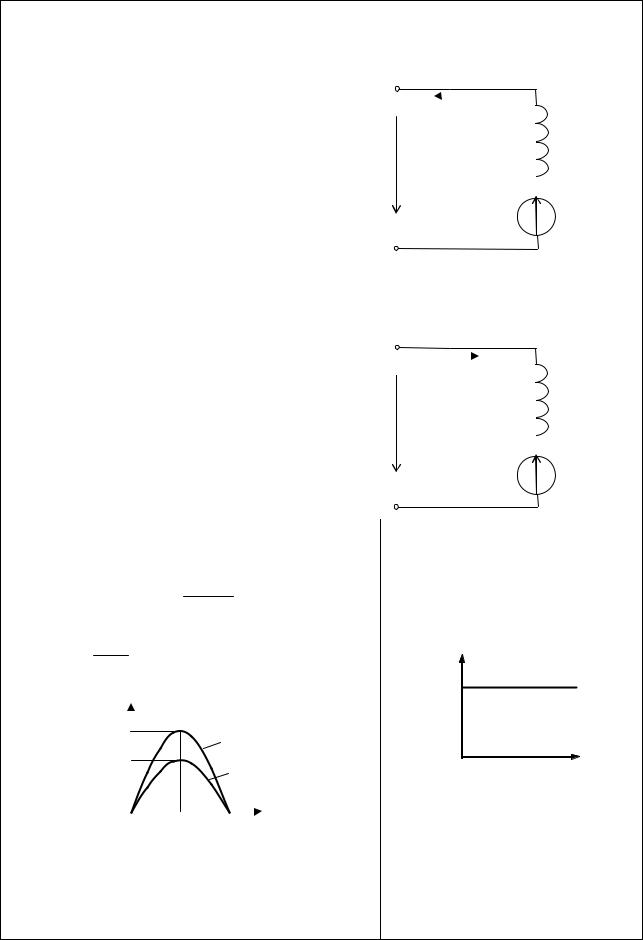
Синхронный генератор
Уравнение электрического |
Схема замещения синхронного |
|||||||||||||
состояния фазы статора |
|
генератора |
||||||||||||
& |
|
& |
|
& |
|
|
|
|
|
|
|
|
|
|
E0 |
= U + jxa I |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
I& |
||||||||
где |
|
|
xa = xрас + xc |
- |
|
|
||||||||
индуктивное |
|
сопротивление |
|
|
|
|
jxa |
|||||||
|
|
|
|
|
|
|
||||||||
фазной обмотки статора |
|
& |
|
|
|
|
|
|||||||
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
U |
|
||||
|
|
|
|
|
|
|
|
|
& |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
E0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Синхронный двигатель |
|||||||
Уравнение электрического |
Схема замещения синхронного |
|||||||||||||
состояния фазы синхронного |
двигателя |
|||||||||||||
двигателя |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
I& |
|||
|
|
|
& |
|
& |
|
& |
|
|
|
|
|
jxa |
|
где E |
|
E0 |
= U − jxa I , |
+ x |
& |
|
|
|
||||||
|
= jωψ , x |
= x |
|
|
|
|
|
|||||||
|
& |
0 |
|
& |
0 |
a |
рас |
c |
U |
|
||||
|
|
|
|
|||||||||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
& |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
E0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Угловая характеристика синхронного двигателя
M = 3E0U , xaΩ0
где Ω0 = 2πf p
|
M |
Iв2> Iв1 |
|
M2 |
|
Iв2 |
|
M1 |
|
I |
|
|
|
в1 |
|
|
|
θ |
|
|
|
|
|
0 π/2 π
вдиапазоне 0<θ<π/2 – устойчивая работа двигателя;
вдиапазоне π/2 <θ< π – неустойчивая работа двигателя
Механическая
характеристика синхронного двигателя
n n1
M
24
U-образные характеристики |
|
U-образные характеристики |
||
синхронного двигателя |
|
синхронного генератора |
||
I |
|
|
I |
|
Граница |
|
|
Граница |
|
устойчивости |
М>0 |
|
устойчивости |
М2= М3 |
|
|
|
|
|
|
М=0 |
|
|
3 |
cosφ=1 |
|
|
М1=0 |
|
|
|
|
2 |
|
φ>0 |
φ<0 |
Iв |
1 |
Iв |
|
|
|
|
|
|
|
|
Iв1 |
Iв3 |
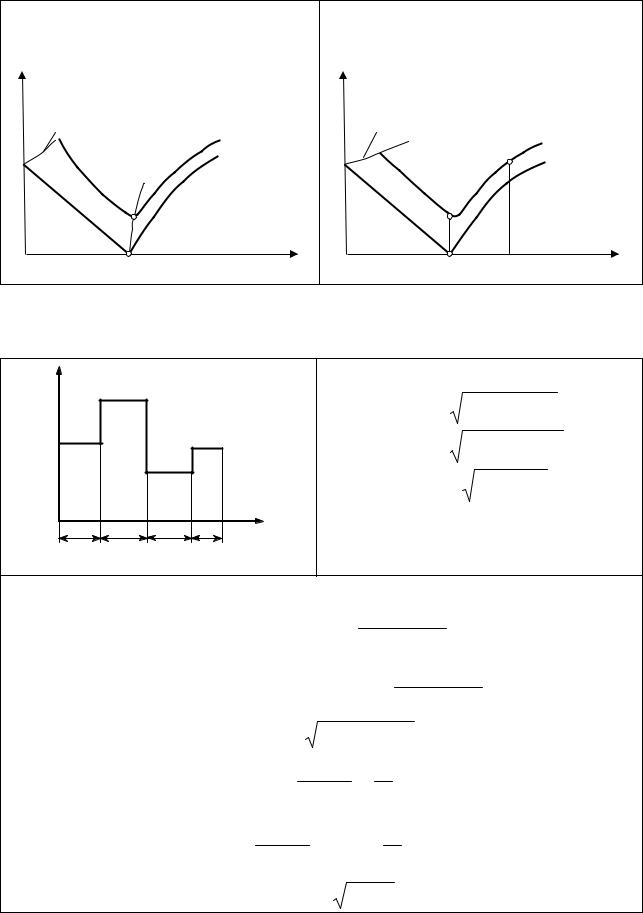
8. ЭЛЕКТРОПРИВОД И АППАРАТУРА УПРАВЛЕНИЯ |
||||
P |
P2 |
|
|
|
|
|
|
|
Рдв ³ Рмх . |
|
|
|
|
|
|
|
Iэк = ∑ I 2t / ∑t; |
||||
P1 |
|
|
P4 |
|
|
|
||||
|
|
|
|
|
M |
|
= |
∑ М 2t / ∑t ; |
||
|
|
P3 |
|
|
|
|
||||
|
|
|
|
|
|
эк |
||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
t |
|
|
|
Pэк = |
∑ Р2t / t |
|
|
|
|
|
|
|
|
|
|
|
|
t1 |
t2 |
t3 |
t4 |
|
|
|
|
|
|
|
|
|
|
M max = λM ном = λ 9,55Р2ном ; |
|
||||||
|
|
|
|
|
|
|
n2ном |
|
|
|
|
|
M max = 0,81λM ном = 0,81λ 9,55Р2ном ; |
||||||||
|
|
|
Рст = Рэк |
|
|
|
n2ном |
|
||
|
|
|
ПВ1 / ПВст , |
|
|
|||||
|
|
|
ПВ = |
tp |
|
= tp , |
|
|
|
|
|
|
|
|
tp + t0 |
tn |
|
|
|
||
|
|
|
ПВ% = |
tp |
100% = tp 100% ; |
|
||||
|
|
|
|
tp + t0 |
|
|
tn |
|
|
|
|
|
|
Pэк = Рмх |
ПВст |
|
|
|
|||
|
|
|
|
|
25 |
|
|
|
|
|
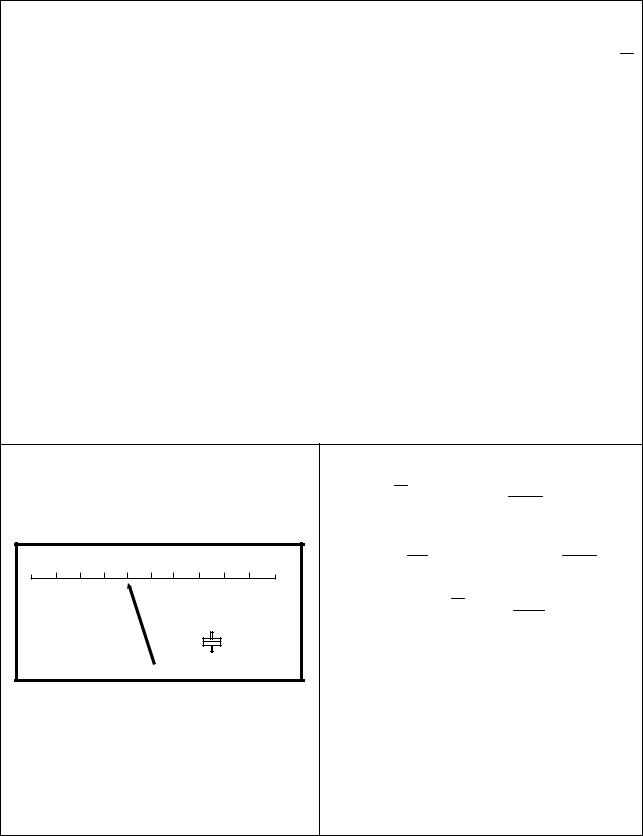
9. ЭЛЕКТРИЧЕСКИЕ ИЗМЕРЕНИЯ
Погрешность измерений
Абсолютная погрешность – разность между измеренным X и действительным Х значениями измеряемой величины.
Относительная погрешность δ – отношение абсолютной погрешности к действительному значению Х, выраженное в процентах.
Приведенная |
погрешность γ |
– отношение абсолютной |
|
погрешности |
к |
нормирующему |
значению XN (часто верхний |
предел диапазона измерения) прибора, выраженное в процентах. Согласно ГОСТ 16263-70 инструментальными погрешностями называют такие, которые присущи данному средству измерения, т.е. могут быть определены при его испытаниях.
Основная инструментальная погрешность определяется по классу точности К средства измерения.
Дополнительная погрешность возникает в результате влияния на показания прибора различных внешних факторов.
Ваттметр электродинамической |
= X − X , g = ± |
|
×100% , |
|||
системы с классом точности 0,5 |
X N |
|||||
|
|
|
||||
|
|
|
|
|
||
0 10 20 30 40 50 60 70 80 90 100 |
d = ± |
×100% , d = K × X N , |
||||
|
|
|
X |
|
X |
|
W |
|
|
|
d |
|
|
|
|
X = X × 1± |
100 |
|
||
|
0,5 |
|
|
|
||
|
|
|
|
|||
|
|
Согласно ГОСТ 8.401-80, если |
||||
|
|
погрешность средств измерения |
||||
|
|
носит аддитивный характер, то |
||||
|
|
класс |
точности |
|
задается |
|
|
|
пределом |
приведенной |
|||
|
|
погрешности |
|
|
||
26