Материал: Общая физика_под ред. Белокопытова_2016 -506с
где ºlOi — момент импульса i-й точки; ºr i — ее радиус-вектор;
º
Ri — равнодействующая всех сил, действующих на i-ю точку; N —
число точек системы.
Просуммируем все составленные уравнения. Тогда левая часть полученной суммы будет выражена в виде
N |
d |
º |
º |
] = |
d |
N |
º |
º |
] . |
∑ |
---- |
[ ri |
, mi v i |
---- |
∑ [ ri |
, mi v i |
|||
|
d t |
|
|
|
d t |
|
|
|
|
i = 1 |
|
|
|
|
|
i = 1 |
|
|
|
Моментом импульса системы точек относительно полюса
называется векторная сумма моментов импульсов каждой материальной точки системы относительно этого полюса:
º |
N |
º |
|
|
N |
º |
º |
] . |
||
LO |
= ∑ lOi |
= ∑ [ ri , |
mi v i |
|||||||
|
i = 1 |
|
|
i = 1 |
|
|
|
|
||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
º |
|
|
|
|
|
|
|
|
|
|
d LO |
|
N |
|
|
º º |
|
|
|
|
|
|
|
|
|
|
|
||||
|
---------- |
= |
∑ |
|
|
ri |
, Ri |
. |
|
|
|
d t |
|
|
|
|
|
|
|
|
|
|
|
i = 1 |
|
|
|
|
||||
|
|
|
|
|
|
|
||||
(4.9)
(4.10)
Равнодействующая всех сил, действующих на i-ю точку системы,
|
|
|
|
|
|
|
|
º |
|
º |
|
|||||
определяется векторной суммой внешних Fi |
и внутренних fik |
сил: |
||||||||||||||
|
|
º |
º |
|
N |
º |
|
|
|
|
|
|
||||
|
|
Ri = |
Fi |
+ ∑ |
fik . |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
k = 1 |
|
|
|
|
|
|
|
|
|
Поэтому (4.10) перепишем в виде |
|
|
|
|
|
|
|
|
|
|||||||
º |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d LO |
N |
|
|
|
º |
|
N |
|
|
|
|
N |
º |
|
|
|
|
º |
|
|
º |
, |
|
||||||||||
---------- |
= ∑ |
|
|
ri , |
Fi |
|
+ ∑ |
|
|
ri |
∑ |
fik |
. |
|
||
d t |
|
|
|
|
|
|
|
|
|
|
|
k = 1 |
|
|
|
|
i = 1 |
|
|
i = 1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
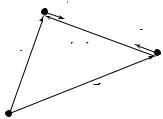
Второе слагаемое в последнем уравнении определяет суммарный момент внутренних сил системы. Покажем, что он равен нулю. Для этого рассмотрим произвольную пару внутренних сил, действующих между i-й и k-й точками (рис. 4.4). Поскольку эти силы подчиняются
º |
º |
|
третьему закону Ньютона, то fik = – |
f k i |
. Поэтому сумма их |
моментов относительно точки О определяется следующим образом:
º |
º |
º |
, |
º |
º |
, |
º |
] = |
Mik |
+ Mk i |
= [ ri |
fik |
] + [ rk |
f k i |
= [ ºri , ºfik] – [ ºrk , ºfik ] = [( ºri – ºrk ), ºfik ] .
51
|
mi |
f |
|
|||||||
|
|
ik |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– |
|
fki |
|||
|
|
|
ri |
rk |
||||||
ri |
||||||||||
|
|
|
|
|
|
|
mk |
|||
|
|
|
|
|
|
|
|
|
||
rk
O |
Рис. 4. 4
Векторы ºfik и ( ºri – ºrk ) параллельны, поэтому их векторное произведение равно нулю.
Таким образом, получили следующее выражение:
º |
|
|
|
|
|
|
d LO |
N |
|
º º |
|
º |
|
|
|
|
||||
---------- |
= ∑ |
|
ri , Fi |
|
= MO внеш . |
(4.11) |
d t |
i = 1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Данное уравнение называется основным уравнением динамики вращательного движения системы материальных точек или
уравнением моментов: скорость изменения момента импульса системы материальных точек равна суммарному моменту внешних сил, действующих на нее.
Из выражения (4.11) следует, что если суммарный момент внешних сил, действующих на систему точек, равен нулю, то момент импульса такой системы остается постоянным. Это — закон сохранения момента импульса системы материальных точек. Изменить момент импульса системы могут не внешние силы, а их момент. Вспомним, что отсутствие внешних сил, действующих на систему, приводит к постоянству ее импульса (2.10).
Закон сохранения момента импульса есть следствие изотропии пространства относительно поворота осей координат: поворот осей координат не влияет на взаимодействие внутри системы тел. Докажем это. Повернем оси координат некоторой системы отсчета на
угол dºϕ . При этом i-я точка системы тел совершит перемещение
d ºri , причем в соответствии с (1.12) d ºri = dºϕ × ºri . Тогда можно сказать, что внешние силы, действующие на i-ю точку, совершили
º º |
º |
º |
º |
) . |
работу δA = Fi d ri |
. Поэтому δA = Fi |
(d ϕ |
× ri |
52
Полученное выражение в математике носит название смешанного произведения векторов. Оказывается, оно обладает замечательным свойством:
º º |
º |
º º |
º |
) , |
a ( b |
× c |
) = b ( c |
× a |
т.е. круговая перестановка его сомножителей не меняет результат произведения. Поэтому
º |
º º |
º º |
º |
º º |
δA = Fi |
(d ϕ × ri |
) = d ϕ ( ri |
× Fi |
) = d ϕ M . |
Поскольку энергия системы при повороте осей координат не изменилась (не изменился характер взаимодействий в системе), то
º |
|
º |
|
M = 0, а поэтому LO = const. |
|
δA = 0. А поскольку d ϕ ≠ 0 |
, то |
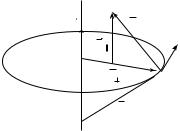
4.3. Момент импульса относительно оси
Рассмотрим вращение материальной точки вокруг оси OZ (рис. 4.5). Выбрав произвольный полюс на этой оси (точка О), най-
º
дем вектор lO — момент импульса данной точки относительно этого
полюса. Моментом импульса точки относительно оси OZ называется скалярная величина lz — проекция на данную ось момента импульса
точки относительно произвольного полюса, принадлежащего этой оси:
|
|
º |
|
lz = ПрOZ lO . |
(4.12) |
||
|
º |
2 º |
|
|
|
||
Ранее (4.4) мы определили, что lOC= mrB |
ω . Поэтому |
||
l |
= mr2 |
ω . |
(4.13) |
z |
B |
z |
|
Z
ωlO
lO
v
r  m
m
r
O 
Рис. 4. 5
53
Подставив (4.13) в (4.8), получим:
dlz |
2 |
d ωz |
|
N |
|
|
------- |
= mrB |
---------- |
= |
∑ Mzi . |
(4.14) |
|
d t |
d t |
|||||
|
|
|
|
i = 1
Вспомним определение углового ускорения и перепишем (4.14) в виде:
|
|
|
N |
|
|
|
N |
∑ Mzi |
|
2 |
|
i = 1 |
||
= |
∑ Mzi , или |
|||
mrBεz |
εz = ----------------- . |
|||
|
|
i = 1 |
mrB2 |
Проекция углового ускорения материальной точки на ось вращения пропорциональна проекции на эту ось суммы моментов сил, действующих на точку. Коэффициентом пропорциональности в этом
соотношении выступает величина mr2B . Произведение массы мате-
риальной точки на квадрат расстояния точки до оси вращения называется моментом инерции материальной точки относительно оси:
Iz = mrB2 , |
(4.15) |
где индекс «z» указывает на выбранную ось. Момент инерции — скалярная величина, его размерность в СИ [Iz] = кг æм2.
Представим (4.14) в виде:
N |
|
Izεz = ∑ Mz . |
(4.16) |
i = 1
Это иная форма записи основного уравнения динамики вращательного движения материальной точки (4.8) в скалярном виде. Из этого соотношения следует физический смысл момента инерции.
Момент инерции — мера инертности материальной точки во вращательном движении, он определяет момент сил, который должен быть приложен к телу для придания ему определенного углового ускорения. Вспомним, что при рассмотрении поступательного движения мерой инертности тела выступает масса тела.
Введение понятия момента инерции позволяет (4.4) записать таким образом: lz = Iz ωz . Сопоставив это выражение с выражением
импульса материальной точки, можно также рассмотреть аналогию понятий: импульс — момент импульса, масса — момент инерции, скорость — угловая скорость.
54
4.4. Момент инерции твердого тела
Поскольку твердое тело представляет собой совокупность материальных точек, то при его вращении вокруг какой-либо оси уравнение (4.13) можно записать для каждой точки тела:
lz i = dmir2Bi ωz ,
где dmi — масса материальной точки, на которые разбивается твер-
дое тело. Здесь учтено, что при вращении твердого тела угловые скорости всех его точек одинаковы. Тогда, просуммировав эти выражения по всему телу, получим
N
Lz = ∑ lz i .
i = 1
Однако твердое тело — непрерывная совокупность материальных точек, т.е. при разбиении тела на отдельные фрагменты (элементарные массы) число таких фрагментов N → ×. Поэтому суммирование выражается в интегрировании элементарных моментов импульса dLz :
Lz = |
∫ |
dLz |
= |
∫ |
rB2 dm |
ωz = Iz ωz , |
|
по массе |
|
(M) |
|
|
|
|
тела |
|
|
|
|
|
где rB — расстояние |
от элемента массы |
dm до оси вращения. |
||||
Откуда следует, что момент инерции твердого тела — это сумма моментов инерции отдельных материальных точек, его составляющих, вычисляемая по формуле
Iz = ∫ rB2 dm . |
(4.17) |
(M) |
|
Таким образом, момент инерции обладает свойством аддитивности: момент инерции системы точек равен сумме моментов инерции каждой точки в отдельности. Кроме того, из (4.17) видно, что значение момента инерции для системы точек (и твердого тела в том числе) зависит от выбора оси вращения системы, т.е. от ее места расположения и ориентации в пространстве.
Для примера определим моменты инерции однородного длинного тонкого цилиндра при его вращении относительно разных осей. Рассмотрим три взаимно перпендикулярные оси вращения, проходящие
55