Записывая решение этих уравнений в общем виде, используя непрерывность волновой функции и ее производной, симметрию задачи, можно прийти к следующему результату: полная энергия частицы Е может принимать конечное число дискретных значений Е0,
Е1, …, Еn, лежащих в интервале (U0, 0), т.е. U0 < Е0 < Е1 < …< Еn< 0,
т.е. полная энергия частицы Е, находящейся в яме, квантована. Именно в этом заключено главное отличие результата квантовомеханической задачи от классического ее решения. При этом частица не может покинуть ямы.
2) E > 0. В этом случае оба подхода, классический и квантовый, дают один результат: частица может находиться в любой области оси X, ее полная энергия может принимать любое значение в интервале 0 < E< ×.
Пример 30.11. Одномерный «потенциальный барьер».
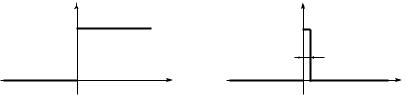
П о с т а н о в к а з а д а ч и . Зависимость потенциальной энергии частицы, показанная на рис. 30.13, вида U(x) = 0 при x < 0 и U(x) = U0 > 0
при x ≥ 0 называется потенциальным барьером. Частица с энергией Е движется слева направо по направлению к барьеру. Необходимо объяснить характер движения частицы в зависимости от ее полной энергии Е.
К л а с с и ч е с к о е р е ш е н и е . Если полная энергия частицы Е меньше «высоты» барьера U0, то частица отражается от него без
потери скорости; в противном случае (Е > U0) частица преодолевает барьер и движется в прежнем направлении с меньшей скоростью.
К в а н т о в о е р е ш е н и е . Необходимо решить два уравнения Шредингера:
В области x < 0 оно имеет вид
|
|
|
∂ 2ψ |
+ k |
2 |
ψ = 0 , |
|
|
|
---------- |
|
|
|
|
∂ t 2 |
|
|
|
где k |
2 |
2m |
E . |
|
|
|
|
= ------- |
|
|
|
|
|
$2 |
|
|
|
|



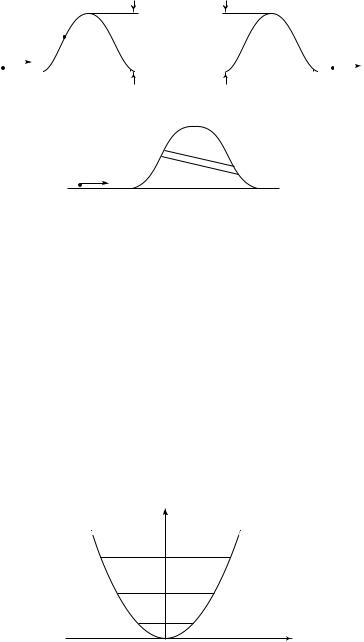
 2gh частица, которая должна подняться до точки А горки и вернуться назад, преодолевает горку и оказывается правее нее, двигаясь с прежней скоростью (рис. 30.15, б ). Все происходит так, как будто в горке имеется туннель
2gh частица, которая должна подняться до точки А горки и вернуться назад, преодолевает горку и оказывается правее нее, двигаясь с прежней скоростью (рис. 30.15, б ). Все происходит так, как будто в горке имеется туннель