Материал: Общая физика_под ред. Белокопытова_2016 -506с

2)модуль ºr ;
3)направление радиуса-вектора в пространстве, определяемое двумя независимыми углами.
Используя векторы единичной длины, сонаправленные с осями
º |
º º |
|
º |
следующим образом: |
|
координат (орты) i |
, j |
, k представляем |
r |
||
|
º |
º |
º |
º |
|
|
r |
= rx i |
+ ry j + rz |
k . |
(1.1) |
Для случая, изображенного на рис. 1.2, можно записать:
rx = x ; ry = y ; rz = z .
Координатный способ. Положение материальной точки М задается с помощью координат x, y, z и записывается в виде М(x, y, z).
З а м е ч а н и е . Минимальное число независимых параметров, которое полностью определяет положение физической системы в пространстве, называется числом ее степеней свободы. Можно сказать, что материальная точка имеет три степени свободы.
1.2. Понятие траектории. Кинематический закон движения материальной точки.
Вектор перемещения. Путь
Линия, которую описывает движущаяся точка в пространстве, называется траекторией. Вид траектории зависит от выбора системы отсчета. Рассмотрим равномерное движение точки по радиусу равномерно вращающегося диска от центра к краю (рис. 1.3). Отно-
сительно системы координат (X ′, Y ′, Z ′) , связанной с вращающимся диском, траектория точки будет прямой линией. Относительно системы координат (X, Y, Z ), связанной с Землей, траектория точки будет спиралью Архимеда.
Z |
Z' |
|
O' |
|
Y' |
|
X' |
O |
Y |
X
Рис. 1. 3
6
В зависимости от вида траектории различают прямолинейное и криволинейное движения. В нашем курсе, как правило, будем рассматривать плоские траектории. Для описания движения материальной точки необходимо задавать кинематический закон движения
— уравнение или систему уравнений, определяющих положение тела в любой момент времени относительно выбранной системы отсчета. При векторном способе задания положения точки в пространстве кинемати-
Z |
1 |
|
|
|
S |
||
|
|
||
L |
r |
2 |
|
r1 |
|||
r2 |
|||
|
|
||
O |
|
Y |
X
Рис. 1. 4
ческий закон ее движения имеет вид: ºr = ºr (t) , а при координатном способе он может быть записан в виде:
x = x(t);
y = y(t); (1.2)
z = z(t).
Если из соотношений (1.2) исключить время t, то получим уравнение, которое будет описывать траекторию материальной точки.
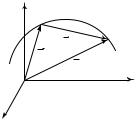
Рассмотрим движение точки по траектории L (рис. 1.4). Пусть в момент времени t точка находилась в положении 1, определяемом
º |
|
|
|
радиусом-вектором r1 |
, а в момент времени t + |
t — в положении 2, |
|
|
º |
|
|
определяемом радиусом-вектором r2 |
. Вектор, проведенный из |
||
начального положения точки в конечное, называется вектором
º |
º |
º |
|
º |
|
перемещения r . Как видно из рис. 1.4, |
r |
= r2 |
– |
r1 |
, т.е. вектор |
перемещения равен изменению (или приращению) радиуса-вектора.
Расстояние между точками 1 и 2, измеренное вдоль траектории, называется путем S.
При стремлении t к нулю конечное приращение радиуса-век-
º |
|
тора r |
заменяется на бесконечно малое приращение радиуса-век- |
тора dºr .
Направление вектора dºr будет совпадать по направлению с еди-
ничным вектором ºτ , направленным по касательной к траектории в сторону движения точки.
7
1.3. Скорость. Нахождение пути. Ускорение
Разобьем траекторию L материальной точки на бесконечно малые участки длиной d L (рис. 1.5). Каждому участку траектории d L будет
соответствовать перемещение dºr . Разделим это перемещение на промежуток времени dt, за который материальная точка проходит
º |
|
|
|
путь d S = |d r |. Мгновенной скоростью материальной точки назы- |
|||
вается производная ее радиуса-вектора по времени: |
|
||
º |
º |
º· |
(1.3) |
v |
= d r ⁄ dt = |
r , |
|
где точкой сверху обозначена производная по времени.
Так как вектор dºr направлен по касательной к траектории в сто-
º
рону движения точки, то и вектор мгновенной скорости v направлен туда же. С учетом выражения (1.1) вектор мгновенной скорости может быть представлен в виде
º |
º |
dx º |
dy |
º |
dz º |
v |
= d r |
⁄ dt = ----- i |
+ ----- |
j |
+ ----- k . |
|
|
d t |
d t |
|
d t |
Таким образом, компоненты вектора скорости определяются как соответствующие производные:
|
|
= |
dx |
· |
|
|
dy |
· |
|
= |
dz |
· |
(1.4) |
v |
x |
----- |
= x ; |
v |
y |
= ----- |
= y ; |
v |
----- |
= z . |
|||
|
|
d t |
|
|
d t |
|
z |
|
d t |
|
|
Тогда модуль скорости может быть найден из выражения:
v 2 = vx2 + vy2 + vz2 .
Равномерным называется движение с постоянной по модулю
скоростью, т.е. |
º |
= const. |
v |
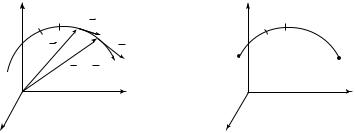
Определим путь, проходимый телом за время t при движении по произвольной траектории из положения 1 в положение 2 (рис. 1.6).
Z |
|
|
Z |
|
|
dL |
dr |
|
L |
|
|
|
L |
|
|
|
|
|
|
L |
r |
υ |
|
|
|
1 |
2 |
||
|
|
r + dr |
||
|
|
|
|
|
|
O |
Y |
O |
Y |
X |
X |
Рис. 1. 5 |
Рис. 1. 6 |
8
Разобьем траекторию на такие малые участки (в дальнейшем называемые элементарными), чтобы можно было считать скорость на этих участках неизменной. Тогда длина траектории i-го участка (путь) будет выражаться формулой
Li = vi ti ,
где vi — модуль скорости на i-м участке; ti — время его прохож-
дения.
Весь путь можно найти как сумму длин всех элементарных участков. При этом путь будет определен тем точнее, чем меньше рас-
сматриваемые элементарные участки |
Li , т.е. чем меньше проме- |
||||||||
жутки времени |
ti : |
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
||||
S = |
lim |
∑ Li = |
lim |
∑vi ti = ∫ |
|
v(t) |
|
dt . |
(1.5) |
|
|
||||||||
|
|
||||||||
|
Si → 0 |
|
ti → 0 |
0 |
|
|
|
|
|
Важной векторной кинематической величиной является ускорение — производная мгновенной скорости по времени, которое характеризует быстроту изменения вектора скорости:
|
º |
2º |
º·· |
|
|
|
º |
dv |
d |
r |
º |
º |
|
a |
= -------- = ----------- = |
r ; |
a |
ÊÊ d v . |
||
|
dt |
dt |
2 |
|
|
|
|
|
|
|
|
|
|
В проекциях на оси координат получим следующие выражения:
a |
|
|
dvx |
|
d |
2x |
|
|
|
|
x |
= -------- |
= -------- ; |
|
|
||||||
|
|
dt |
|
dt |
2 |
|
|
|
||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
2y |
|
|
||
ay |
= |
dvy |
= |
d |
; |
|
(1.6) |
|||
-------- |
-------- |
|
||||||||
|
|
|
dt |
|
dt 2 |
|
|
|
||
a |
|
= |
dvz |
|
d2z |
|
|
|
||
|
-------- |
= -------- . |
|
|
||||||
|
z |
|
dt |
|
|
|
2 |
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
1.4. Кинематический закон движения материальной точки с постоянным ускорением
Если вектор ускорения остается постоянным по модулю и направлению, то такое движение называется равнопеременным.
Из определения ускорения следует |
º |
= |
º |
||
dv |
a dt . После интегрирова- |
||||
ния этого выражения получим |
|
|
|
|
|
º |
|
º |
º |
|
|
v |
= |
v 0 |
+ a t , |
(1.7) |
|
9

|
º |
|
|
|
|
|
º |
|
где |
v 0 — начальная скорость в момент времени t = 0; |
v |
— ско- |
|||||
рость в момент времени t. |
|
|
|
|
|
|
|
|
Воспользуемся выражением |
(1.3), |
которое запишем |
в виде |
|||||
º |
º |
|
|
|
|
|
|
|
d r |
= v dt . После подстановки значения скорости из (1.7) и интег- |
|||||||
|
º |
|
|
|
|
|
|
|
рирования при a = const получаем: |
|
|
|
|
|
|||
|
º |
º |
º |
º |
2 |
⁄ 2 , |
|
|
|
r = |
r 0 + v 0t + |
a t |
|
|
|
||
где ºr 0 — радиус-вектор, определяющий положение тела в момент
времени t = 0.
Использовав (1.2), запишем законы изменения координат тела:
x = x |
|
+ v |
|
t + a |
|
t 2⁄ 2; |
|
|
0 |
|
0x |
|
x |
|
|
|
|
|
|
|
|
|
|
y = y0 |
+ v0yt + ayt 2⁄ 2; |
||||||
|
|
|
|
|
|
|
|
z= z0 + v0zt + azt 2⁄ 2.
1.5.Нормальное и тангенциальное ускорения
Вобщем случае направление вектора ускорения тела неизвестно. Для его нахождения выберем в каждой точке траектории два единич-
º |
º |
º |
ных вектора — τ |
и n . Вектор |
τ направим по касательной к тра- |
º
ектории в сторону движения точки, а вектор n — по нормали в сторону вогнутости траектории (рис. 1.7). В конкретных задачах бывает
º
удобно рассматривать проекции вектора ускорения a на выбранные таким образом направления.
Проекция |
º |
на направление |
|
º |
называется |
нормальным |
|||||
a |
|
|
n |
||||||||
|
|
|
|
|
(центростремительным) ускорением , а на |
||||||
|
|
|
|
|
º |
|
|
|
|
||
|
|
|
|
|
направление |
τ |
|
тангенциальным (касатель- |
|||
τ |
|
|
|||||||||
|
|
|
|
|
ным) ускорением |
|
|
|
|||
|
|
|
|
|
º |
|
|
º |
º |
|
|
|
|
|
|
|
a |
|
= aτ τ |
+ an n , |
(1.8) |
||
|
n |
|
|
||||||||
|
|
|
|
|
где aτ и an— модули тангенциального и нор- |
||||||
|
|
Рис. 1.7 |
|
мального ускорений. |
|
|
|||||
10