Материал: Общая физика_под ред. Белокопытова_2016 -506с
Выясним физический смысл этих ускорений. Для этого предста-
вим скорость следующим образом: |
º |
= |
º |
|
|
|
|||||
v |
v τ |
. Определим ускорение |
|||||||||
|
º |
|
|
|
|
º dv |
|
º |
|
|
|
º |
d v |
|
d |
º |
|
|
d τ |
|
|
||
a = |
----------- |
= |
---- |
(v τ ) = |
τ |
----- |
+ |
-------- |
v . |
(1.9) |
|
dt |
dt |
dt |
dt |
||||||||
Из сравнения первых слагаемых в формулах (1.8) и (1.9) видно, что
aτ = dv ⁄ dt .
Таким образом, тангенциальное ускорение характеризует быстроту изменения модуля скорости. Найдем модуль и физический смысл второго слагаемого выражения (1.9).
º º
Напомним, что скалярным произведением векторов a и b
называется скалярная величина c, определяемая как произведение модулей векторов и косинуса угла между векторами: c =
|
|
|
|
|
|
|
|
º º |
= |
|
º |
|
|
º |
º º |
º º |
d( τ , τ ) |
|
|
|||||||
|
a |
|
|
b |
cos ( a , b ) . Поскольку ( τ , τ ) = 1 = const , то ------------------------ = |
|||
|
|
|
|
|
|
|
|
dt |
= 0. Производную по времени выражения ( ºτ , ºτ ) можно найти следующим образом:
|
º º |
º d τ |
|
d τ |
º º d τ |
|
||
d( τ , τ ) |
|
|
||||||
|
|
|
º |
|
º |
|
º |
|
------------------------ |
= τ |
--------- |
+ |
--------- |
τ = 2 τ |
--------- |
|
|
|
dt |
dt |
dt |
dt . |
||||
|
º |
|
|
|
|
|
º |
|
º d τ |
|
|
|
|
º |
d τ |
|
|
Поэтому τ |
--------- |
, а следовательно, τ |
--------- |
. Итак, второе |
||||
dt = 0 |
dt |
|||||||
слагаемое выражения (1.9) — это вектор, перпендикулярный ºτ ,
º
а значит, направленный по нормали n , т.е. это — вектор нормального ускорения.
Рассмотрим частный случай равномерного движения материальной точки по окружности радиуса R (рис. 1.8, а). Пусть за промежуток времени t точка, двигаясь из положения 1 в положение 2, совершила
|
|
º |
|
º |
|
|
||
перемещение r . Вектор |
|
τ |
за это время изменил направление, |
|||||
повернувшись вместе с точкой на угол |
º |
|||||||
α. Изобразим вектор τ = |
||||||||
º |
º |
|
|
|
|
|
|
|
= τ 2 – |
τ 1 |
(рис. 1.8, б). Из подобия равнобедренных треугольников |
||||||
следует |
|
|
|
|
|
|
|
|
|
|
|
º |
|
|
⁄ τ = |
º |
⁄ R , |
|
|
|
τ |
|
|
r |
||
11

1τ1
r |
|
Δα |
τ1 |
R |
|
|
|
2 |
|
|
|
Δα |
τ2 |
|
τ |
|
τ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1. 8 |
|
|
|
|
|
|
|
откуда |
τ = |
1 |
r |
. Устремим промежуток времени t |
к 0. Тогда |
|||||||||||
----- |
||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
τ → dτ , |
r → dr |
, а поэтому dτ |
1 |
dr . Разделив на d t, получим |
|||||||||||
|
= ----- |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
dτ |
1 |
|
dr |
= |
1 |
v . |
Поэтому |
модуль второго |
слагаемого в (1.9) |
|||||||
----- = |
----- ----- |
----- |
||||||||||||||
dt |
R |
dt |
|
R |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
º |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d τ |
|
|
= |
v 2 |
. Таким образом, получено, что |
a |
|
= v 2⁄ |
R . |
||||||
|
--------- |
v |
|
----- |
n |
|||||||||||
|
dt |
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
Если движение по окружности будет неравномерным, то |
|||||||||||||||
|
|
|
|
|
|
|
º |
º |
º |
dv |
º |
v 2 |
º |
|
|
|
|
|
|
|
|
|
|
a |
= aτ τ + an n |
----- |
τ + |
----- |
n . |
(1.10) |
|||
|
|
|
|
|
|
|
= dt |
R |
||||||||
Для произвольной плоской траектории (рис. 1.9) в каждой ее точке можно провести так называемую соприкасающуюся окружность, которая достаточно хорошо в этом месте траектории совпадает с самой траекторией. Радиус этой окружности назовем радиусом кривизны траектории ρ. В этом случае нормальное ускорение
τ
n
ρ
Рис. 1. 9
12
запишется в виде an = v 2⁄ ρ , а модуль полного ускорения найдется по формуле
º |
= |
(dv ⁄ dt)2 + (v 2⁄ ρ) |
2 |
a |
. |
Заключение. Все вышеизложенное относится к классическому способу описания движения материальной точки. При неклассическом рассмотрении движения микрочастиц понятия траектории их движения не существует, но можно говорить о вероятности нахождения частицы в той или иной области пространства. Для микрочастицы нельзя одновременно указать точные значения координаты и скорости. В квантовой механике существует соотношение неопреде-
ленностей В. Гейзенберга x (mv |
) ≥ i , где i = 1,05æ10–34 Джæс |
x |
|
(постоянная М. Планка), которое определяет погрешности одновременного измерения координаты x и импульса (mvx) .
1.6. Вращательное движение абсолютно твердого тела. Кинематические характеристики вращательного движения вокруг неподвижной оси
Все, о чем говорилось до сих пор, относилось к материальной точке. А как описать движение твердого тела? Всякое плоское движение абсолютно твердого тела можно представить как сумму двух движений: поступательного и вращательного.
Поступательным движением абсолютно твердого тела называется такое, при котором любая прямая, связанная с телом, остается параллельной самой себе. При таком движении траектории всех
точек одинаковы, поэтому достаточно наблю- |
|
|
|
|
дать за движением только одной точки. |
|
|
|
|
Обычно в качестве такой точки выбирается |
|
|
|
|
|
|
|
|
|
так называемый центр масс. О том, как эта |
|
|
|
|
точка определяется, раскажем далее. |
dϕ |
|
|
|
|
|
|||
Вращательным движением абсолютно |
|
|
|
Δϕ |
твердого тела называется такое, при кото- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ром все точки тела описывают окружности, |
|
|
|
|
центры которых лежат на одной прямой, |
|
|
|
|
называемой осью вращения. |
|
|
|
|
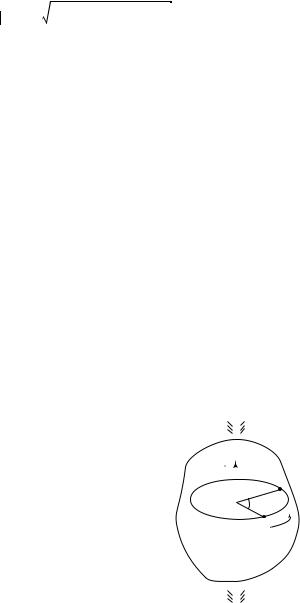
Рассмотрим твердое тело, вращающееся |
|
|
|
|
вокруг неподвижной оси (рис. 1.10). За беско- |
|
|
|
|
нечно малый промежуток времени dt все |
|
|
|
|
|
|
|
|
|
точки тела повернутся на бесконечно малый |
|
|
|
|
угол dϕ. Будем считать угол поворота векто- |
Рис. 1. 10 |
|||
13

ром, который направлен по оси вращения тела в сторону, определяемую правилом правого винта (правилом буравчика). Согласно этому правилу, если правый винт вращать по направлению вращения твердого тела вокруг оси, совпадающей с осью вращения тела, то направление поступательного движения винта дает направление вектора
|
|
º |
|
|
|
|
|
|
|
|
|
угла поворота тела d ϕ . |
|
|
|
|
|
||||||
|
|
|
|
º |
º |
|
|
|
|
||
Векторное произведение двух векторов a |
и b , которое обозна- |
||||||||||
|
º |
|
|
º |
|
|
|
|
|
º |
|
º |
º |
|
|
º |
º |
||||||
чается a |
× b или |
|
a , |
b |
, представляет собой вектор |
c |
= a |
× b . |
|||
|
|
|
|
|
|
|
º |
º |
и направлен |
||
|
|
|
|
|
|
|
|||||
Он по определению перпендикулярен векторам a и |
b |
||||||||||
в ту сторону, куда будет поступательно перемещаться правый винт,
º
если его вращать от вектора a (первого сомножителя произведе-
º
ния) к вектору b (второму сомножителю произведения) по кратчайшему углу (рис. 1.11). Основные свойства векторного произведения:
|
|
1. Модуль векторного произведения двух векторов равен пло- |
|||||||||||||||||
щади |
|
|
параллелограмма, |
построенного |
на этих векторах: |
||||||||||||||
|
|
|
= |
|
º |
|
|
º |
|
º |
º |
º |
º |
º |
º |
|
|||
|
º |
|
|
|
|
|
|
|
|||||||||||
|
c |
|
|
|
|
a |
|
|
b |
|
sin ( a , |
b ) , |
a |
c , |
b |
c . |
|
||
|
|
2. Векторное произведение не обладает коммутативностью, т.е. |
|||||||||||||||||
º |
× |
º |
|
= |
º |
|
º |
|
|
|
|
|
|
|
|||||
|
a |
b |
|
|
– b × a . |
|
|
|
|
|
|
|
|||||||
|
|
3. |
|
|
Векторное |
произведение |
обладает |
дистрибутивностью: |
|||||||||||
º |
× |
º |
º |
|
º |
× |
º |
º |
º |
|
|
|
|||||||
|
a |
b |
|
+ d |
= a |
b + |
a |
× d . |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
º× º
4.a a = 0 .
Рассмотрим поворот тела на малый угол dºϕ за время dt. Угловой скоростью тела называется производная угла поворота по времени:
c b
b
α
a
Рис. 1. 11
|
º |
|
|
º |
d ϕ |
|
|
ω = |
-------- |
, |
(1.11) |
dt |
причем направление вектора ºω совпадает с
направлением вектора dºϕ , т.е. также определяется по правилу правого винта. Размерность угловой скорости [ω] = рад/с. Вращение называется равномерным, если модуль угловой скорости при вращении тела остается постоянным. В этом случае ϕ = ωt.
14

В качестве параметров равномерного вращения используют:
период (T )— время, за которое тело совершает один оборот; частоту (ν) — число оборотов за единицу времени. Между ними существует очевидная связь:
ν = 1 ⁄ T .
При неравномерном вращении тела вводится угловое ускорение —
производная угловой скорости по времени. Это векторная величина, характеризующая быстроту изменения угловой скорости:
ºε = dºω ⁄ d t .
Сравним угловые скорости ºω1 в момент времени t и ºω2 =
= ºω1 + dºω в момент времени t + d t. Из рис. 1.12 видно, что векторы
ºε и ºω сонаправлены при ускоренном (рис. 1.12, а) и противоположны при замедленном вращении тела (рис. 1.12, б). Таким обра-
зом, направление вектора ºε определяется направлением вектора
приращения угловой скорости dºω .
Если модуль углового ускорения сохраняет постоянное значение, то вращение называется равнопеременным. В этом случае кинематический закон вращения запишем в виде
ºω = ºω0 + ºε t;
ºϕ = ºϕ 0 + ºω0t + ºε t 2⁄ 2,
где ºω0 и ºϕ 0 — начальные угловая скорость и угол поворота.
Если твердое тело вращается относительно оси, то каждая точка
º
тела имеет определенную линейную скорость v . Найдем связь
между скоростями º и ºω . Пусть твердое тело повернулось на угол v
ω2 |
|
|
|
|
ω1 |
|
|
|
|
||
|
|
|
ε |
ω2 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||
ω1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε |
|
|
|
а) |
|
|
б) |
|||||
Рис. 1. 12
15