Материал: Общая физика_под ред. Белокопытова_2016 -506с
обусловлено только его взаимодействием с другими телами. Свободная материальная точка, не подверженная действию других тел, движется относительно такой системы отсчета без ускорения, т.е. равномерно и прямолинейно (или покоится). Утверждение, что такие системы отсчета существуют, составляет содержание первого закона динамики — закона инерции.
Первый закон Ньютона: существуют такие системы отсчета, называемые инерциальными, в которых материальная точка находится в состоянии покоя или равномерного прямолинейного движения до тех пор, пока воздействие со стороны других тел не выведет ее из этого состояния.
Данный закон не очевиден. Со времен Аристотеля (384—322 гг. до н.э.) до Галилея считалось, что для поддержания неизменной скорости тела необходимо воздействие других тел на него. Существование инерциальных систем отсчета подтверждается опытом. Астрономические наблюдения показали инерциальность гелиоцентрической системы отсчета, связанной с центром Солнца. Любая другая система отсчета, движущаяся равномерно и прямолинейно относительно инерциальной, также является инерциальной. Действительно, если в инерциальной системе отсчета ускорение тела равно нулю, то оно равно нулю и в любой из таких систем (1.19). Системы отсчета, движущиеся с ускорением относительно инерциальных систем, называют неинерциальными.
Для инерциальных систем отсчета справедлив принцип относительности Галилея, согласно которому все инерциальные системы отсчета по своим механическим свойствам эквивалентны одна другой. Это означает, что никакими механическими опытами, проводимыми в данных системах, нельзя установить, покоится эта система отсчета или движется. Основные законы механики, которыми определяются изменения характера движения тел, во всех инерциальных системах отсчета одни и те же.
Изучая на опыте различные движения, можно обнаружить, что в инерциальных системах отсчета любое ускорение тела вызывается действием на него каких-либо других тел. Мера механического взаимодействия тел называется силой. Сила — векторная физическая величина, характеризующаяся модулем, направлением и точкой приложения к телу. Действие силы на тело выражается в сообщении телу ускорения и (или) деформации тела.
2.2. Второй и третий законы Ньютона
Опыт показывает, что любое тело «оказывает сопротивление» попыткам изменить его скорость — как по модулю, так и по направлению. Свойство материальных тел сохранять свою скорость неиз-
21
менной при отсутствии действующих на тело сил и постепенно изменять скорость, когда на тело начинают действовать силы, называется инертностью. Мера инертности тела называется
массой тела. Тело с большей массой более инертно, и наоборот. При действии одинаковых сил на два различных тела отношение масс тел обратно отношению модулей ускорений, сообщаемых телам равными силами:
m1 / m2 = a2 / a1. |
(2.1) |
Таким образом, сравнение масс двух тел, на которые действует одна и та же сила, сводится к сравнению ускорений этих тел. Взяв некоторое тело за эталон массы, можно сравнить массу любого тела с этим эталоном. В рамках классической механики масса обладает двумя важнейшими свойствами:
1)масса — величина аддитивная, т.е. масса тела равна сумме масс его частей;
2)масса — величина постоянная, не изменяющаяся при движении
тела.
Второй закон Ньютона утверждает, что в инерциальных системах отсчета ускорение тела прямо пропорционально силе, действующей на тело, и обратно пропорционально массе тела:
º |
º |
⁄ m. |
a |
= F |
Если рассматриваемое тело взаимодействует с несколькими телами, то суммарный результат действия отдельных тел можно представить как действие на данное тело векторной суммы сил:
N º
∑ Fi
º |
i = 1 |
, |
(2.2) |
a = |
--------------m |
||
|
|
|
º
где Fi — сила взаимодействия i-го тела с данным.
Единицей силы в СИ является ньютон (Н). 1 ньютон — это такая
сила, которая сообщает телу массой 1 кг ускорение 1 м / с2.
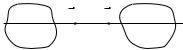
Опыт показывает, что взаимодействие тел в природе осуществляется парным образом, т.е. если тело I сообщает ускорение телу II, то и тело II сообщает ускорение телу I (рис. 2.1). Общее свойство всех
F12 |
F21 |
I |
II |
Рис. 2. 1
22
сил взаимодействия постулируется третьим законом Ньютона:
силы, с которыми две материальные точки действуют одна на другую в инерциальной системе отсчета, всегда равны по модулю и направлены в противоположные стороны вдоль прямой, соединяющей эти точки, т.е.
º |
º |
|
F 21 |
= – F 12. |
(2.3) |
Эти силы приложены к разным телам и являются силами одной природы.
2.3. Силы
Современный взгляд на природу возникновения сил устанавливает три типа взаимодействий: 1) гравитационное; 2) электрослабое (электромагнитное и слабое); 3) сильное (или ядерное). Эти взаимодействия будут изучаться в соответствующих разделах курса.
Взаимодействие тел может происходить при «контактном» действии (силы трения, сила упругости, сила натяжения нити, реакция опоры, вес и т.д.) и при действии на расстоянии, посредством поля (сила тяжести, сила Кулона, сила Лоренца и т.д.).
Однако такое разделение сил имеет условный характер: и при непосредственном контакте силы взаимодействия обусловлены наличием тех или иных полей, создаваемых атомами или молекулами тел. Под полем мы будем понимать объективную реальность, посредством которой осуществляются взаимодействия.
Понятие поля, так же как понятия силы и массы, относится к числу «первоначальных» понятий в физике. Поэтому дать логически четкие определения этим понятиям, т.е. выразить их через более «первичные», нельзя. Можно описать некоторые свойства поля.
Поле — форма существования материи, которая в отличие от вещества не локализована в пространстве. Можно говорить о массе единицы объема поля, об энергии некоторого объема поля. Строгой границы между полем и веществом провести нельзя, так как при определенных условиях они могут взаимно превращаться, т.е. вещество переходит в поле и наоборот. Поле распространяется в
пространстве с определенной скоростью (не более с = 3æ108 м / с), поэтому не может быть мгновенных взаимодействий.
Рассмотрим некоторые виды сил, которые встретятся нам при изучении задач механики.
1. Гравитационное взаимодействие — универсальное взаимодействие между любыми видами материи. Если две материальные точки движутся со скоростями v << c , то справедлив закон всемир-
23
ного тяготения Ньютона, согласно которому эти точки притягиваются одна к другой с силой, вычисляемой по формуле
|
m1m2 |
|
|
F = G |
-------------- |
, |
(2.4) |
r 2 |
где r — расстояние между точками. Коэффициент пропорциональности G называется гравитационной постоянной, и был впервые экспериментально определен английским ученым Г. Кавендишем в 1798 г. По сов-
ременным данным G = 6,67259(85)æ10– 11 м3æкг– 1æс– 2. Фигурирующие в этом законе массы называют гравитационными в отличие от инертной массы, входящей во второй закон Ньютона. Из опыта, однако, установлено, что гравитационная и инертная массы любого тела пропорциональны одна другой. Поэтому можно считать их равными (т.е. выбрать один и тот же эталон для измерения обеих масс) и говорить просто о массе, которая выступает как мера инертности тела или как мера гравитационного воздействия.
Теория тяготения Ньютона явилась большим достижением своего времени. На основании этой теории можно описать движение естественных и искусственных тел в Солнечной системе, провести гравиметрическую разведку полезных ископаемых и т.д. Блестящим подтверждением теории Ньютона явилось открытие планеты Нептун английским астрономом Дж. Адамсом в 1846 г. по расчетам возмущений орбиты Урана, которые выполнил французский математик У. Леверье. Однако в некоторых случаях тяготение не может быть описано законом Ньютона. Так, эта теория неприменима для расчета траектории светового луча в гравитационном поле. Обобщение теории тяготения на основе специальной теории относительности было сделано А. Эйнштейном в 1916 г. и получило название общей теории относительности, которая подтвердилась в ряде экспериментов.
При рассмотрении движения тела массой т в поле тяготения Земли, если высота тела над поверхностью планеты меняется незначительно по сравнению с радиусом Земли, выражение силы тяготения (2.4) удобно заменить выражением однородной силы тяжести
º |
º |
|
F |
||
= m g , |
где º — ускорение свободного падения тела в поле тяжести. g
º
2. Вес тела P — сила, с которой тело действует на опору (или подвес), неподвижную относительно данного тела.
3. Внешнее трение, которое обычно называют просто трением в отличие от внутреннего трения, о котором будет сказано в разд. , — механическое сопротивление, возникающее в плоскости касания
24
Fтр
C  B
B
A
Ovотн
A'
B' C'
C'
Рис. 2. 2
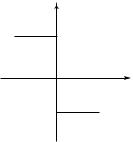
двух прижатых одно к другому тел при их относительном перемещении или попытке к перемещению. В первом случае говорят о наличии силы трения скольжения, во втором — о наличии силы трения покоя.
Направление силы трения противоположно относительному перемещению трущихся поверхностей или возможному перемещению. По наличию прослойки между телами различают сухое и жидкое трение. При наличии трения скольжения происходит электризация тел, выделение теплоты и разрушение трущихся частиц. Зависимость силы сухого трения от относительной скорости трущихся поверхностей приведена на рис. 2.2. Участки графика ОАВ и ОА′В ′ соответствуют силе трения покоя, а АС и А′С ′ — силе трения скольжения. Участки графика АВ и А′В ′ соответствуют явлению застоя.
Возникновение силы трения объясняется, во-первых, изменением поверхностного слоя (разрушением), а во-вторых, преодолением молекулярных связей. В дальнейшем будем рассматривать силу трения скольжения, действующую на тело, движущееся по шероховатой поверхности. Ее модуль определяется выражением
Fтр.ск = μN , |
(2.5) |
где N — модуль силы нормальной реакции, приложенной к телу со стороны опоры; μ — коэффициент трения.
Модуль силы трения покоя не превышает модуля силы трения скольжения и определяется внешней силой.
4. Упругость — свойство тел изменять свою форму и размеры под действием нагрузок и самопроизвольно восстанавливать исходную конфигурацию при снятии внешних воздействий. Упругость тел обусловлена электрическими силами взаимодействия атомов и молекул, из которых они построены. Упругие деформации (возникающие,
25