Материал: Общая физика_под ред. Белокопытова_2016 -506с
|
|
º |
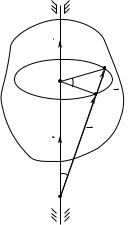
(рис. 1.13). Тогда произвольная точка |
|||
|
|
d ϕ |
||||
ω |
|
|
|
|
|
º |
|
тела М совершила перемещение d r . Напом- |
|||||
Δϕ |
|
|
|
|
º |
направлен по касатель- |
|
ним, что вектор d r |
|||||
О1 |
r |
|
|
|
|
º |
R |
ной к траектории точки М и при малом d ϕ |
|||||
|
M |
|
|
º |
|
|
|
|
направление |
стремится к направлению |
|||
|
|
r |
||||
dϕ |
r |
º |
|
|
|
|
|
|
|
|
|
||
|
dr . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выберем на оси вращения произвольную |
||||
β |
|
точку О, называемую полюсом, и поместим в |
||||
О |
|
нее начало координат. Положение точки М |
||||
|
|
|
|
|
º |
|
|
|
|
|
задается радиусом-вектором |
r , |
который в |
||
|
|
|
|||||
|
|
|
общем случае составляет с осью вращения |
||||
Рис. 1. 13 |
угол β. Отметим, что |
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
º |
º |
º |
|
(1.12) |
|
|
|
dr |
= d ϕ |
× r . |
|
|
Действительно, векторы dºr , dºϕ и ºr подчиняются правилу правого винта. Найдем модуль векторного произведения:
dr = R dϕ = r sin β dϕ ,
где R — радиус окружности, по которой движется точка М.
Если продифференцировать по времени обе части равенства (1.12), то с учетом (1.3) и (1.11) можно получить
º |
º º |
(1.13) |
v |
= ω × r . |
Заметим, что выбор полюса О может быть произвольным (положение точки О никак не влияет на вывод формулы). Если в качестве полюса выбрать точку О1, то из (1.13) следует, что
v = ωR .
Последнее равенство связывает модули угловой и линейной скоростей точки твердого тела с радиусом окружности, по которой движется рассматриваемая точка.
Найдем ускорение точки М, для чего продифференцируем выражение (1.13) по времени:
|
|
|
º |
|
|
º |
|
|
|
|
a |
= d t |
ω, r |
|
= d t |
× r |
+ ω × |
d t |
= ε |
× r |
+ ω × v . (1.14) |
º |
----d |
º º |
|
--------d ω |
º |
º |
-------dr |
º |
º |
º º |
|
|
|
|
|
|
|
|
|
|
|
16
Первое слагаемое в (1.14) — это вектор, направленный по касательной к траектории точки М, т.е. тангенциальное ускорение:
º |
|
º |
º |
º |
|
a τ |
= a |
τ τ |
= ε |
× r , |
(1.15) |
его модуль aτ = εr sin β = εR .
Второе слагаемое в (1.14) — это вектор, направленный к центру окружности, по которой движется точка М, т.е. нормальное ускорение:
|
|
º |
|
|
º |
º |
º |
|
|
|
|
a n |
= |
an n |
= ω × v |
, |
(1.16) |
||
его модуль a |
|
π |
ω |
2 |
R = |
v 2 |
|
|
|
n |
= ωv sin -- = |
|
----- . |
|
|
|
|||
|
2 |
|
|
|
R |
|
|
|
|
1.7. Преобразования скорости и ускорения при переходе к другой системе отсчета
Поставим перед собой следующую задачу. Имеются две произвольные системы отсчета (X, Y, Z ) и (X ′, Y ′, Z ′ ), движущиеся одна
º º
относительно другой. Известны скорость v и ускорение a некоторой точки М в системе отсчета (X, Y, Z ). Каковы будут соответ-
º′ º′
ствующие значения скорости v и ускорения a этой точки в системе (X ′, Y ′, Z ′ )?
Напомним, что в рамках классической механики длины пространственных и временных отрезков считаются абсолютными. Это означает, что длина отрезка, измеренная в некоторой пространственной системе координат, и временной интервал между двумя событиями, измеренный по часам этой системы отсчета, одинаковы в разных системах отсчета, т.е. не зависят от движения. Свойство физических величин сохранять свои значения неизменными в разных системах отсчета называется инвариантностью, а сами такие величины — инвариантами.
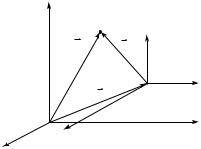
Пусть положение точки М в системе (X, Y, Z ) задается радиусом-
º |
Y ′, Z ′ ) радиусом-вектором |
º |
′ |
вектором r , а в системе (X ′, |
r |
(рис. 1.14). Будем считать систему (X, Y, Z ) неподвижной (абсолютной), а систему (X ′, Y ′, Z ′ ) — движущейся относительно нее (относи-
17
Z |
|
|
|
|
M |
|
|
r |
r' |
Z' |
|
|
r0 |
O' |
Y' |
O |
|
|
|
X' |
|
|
Y |
|
|
|
|
X |
|
|
|
Рис. 1. 14 |
|
|
|
тельной). Если положение движущейся системы относительно
неподвижной задается радиусом-вектором ºr 0 , то
ºr = ºr 0 + ºr ′ .
Таким образом, преобразования координат и времени при переходе из одной системы отсчета в другую в классической механике описываются системой уравнений
x = x |
0 |
+ x ′; |
|
|
|
|
|
|
|
|
|
|
|
|
y = y0 |
+ y′; |
(1.17) |
||
|
|
|
|
|
z = z0 |
+ z′; |
|
|
|
|
|
|
|
|
t = t′. |
|
|
|
|
|
|
|
|
|
Данная система уравнений носит название преобразований Галилея.
Если перемещение точки М за время dt происходит в неподвижной системе, то оно складывается из перемещения относительно дви-
жущейся системы dºr ′ и перемещения самой движущейся системы
dºr 0 :
dºr = dºr 0 + dºr ′ .
Разделив последнее выражение на d t, получим формулу преобразования скорости
º |
º |
|
º |
′ . |
(1.18) |
v |
= v |
0 |
+ v |
||
|
|
|
|
|
18
Данное выражение называется классическим законом сложения скоростей. Если соотношение (1.18) снова разделить на d t, то найдем формулу преобразования ускорения:
º |
º |
+ |
º |
′ . |
|
(1.19) |
|||
a |
= a |
0 |
a |
|
|||||
|
|
|
|
|
|
|
|
|
|
Из (1.19) видно, что из условия |
º |
= 0 |
º |
º |
′ . |
||||
a |
0 |
следует, что a |
= a |
||||||
|
|
|
|
|
|
|
|
|
|
Таким образом, при движении двух систем отсчета без ускорения одной относительно другой ускорения точки М в таких системах будут одинаковыми.
19

Г л а в а 2
ДИНАМИКА ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
Динамика рассматривает два типа задач. Первый тип — определение действующих на материальную точку сил, исходя из закона движения материальной точки. В технике такие задачи решаются, когда необходимо найти внутренние усилия в различного рода деталях машин, если известны законы движения этих деталей. Второй тип задач динамики — определение кинематического закона движения тела, исходя из действующих на тело сил. При этом необходимо знать так называемые начальные условия. Примером такого типа задач является нахождение траектории (дальности полета, высоты подъема, времени полета и т.п.) движения тела, брошенного под углом к горизонту. При этом известно, что на тело действует сила тяжести, а также заданы начальная скорость тела и угол бросания.
В нашем курсе встречаются задачи как первого, так и второго типа. В этой главе наряду с понятиями, которые использовались ранее, будут использоваться новые.
2.1. Основные понятия динамики. Инерциальные системы отсчета. Первый закон Ньютона.
Принцип относительности Галилея
При изучении кинематики, когда речь шла лишь об описании движений и не затрагивался вопрос о причинах, вызывающих эти движения, никакой принципиальной разницы между различными системами отсчета не было. Совершенно иначе обстоит дело в динамике — при изучении законов движения. Обнаруживаются существенное различие между разными системами отсчета и преимущества одного типа систем отсчета по сравнению с другими.
Законы механики в разных системах отсчета имеют различный вид, поэтому возникает задача отыскания такой системы отсчета, в которой законы механики были бы возможно более простыми. Какова причина появления ускорения материальной точки относительно произвольной системы отсчета? Опыт показывает, что этой причиной могут быть как действия других тел на данную точку, так и свойства самой системы отсчета. Можно предположить, что существует такая система отсчета, в которой ускорение тела целиком
20