Материал: Общая физика_под ред. Белокопытова_2016 -506с
проходящей через центр масс, и произведения массы тела на квадрат расстояния между этими осями. Знание моментов инерции тела относительно осей, проходящих через центр масс тела, позволяет найти момент инерции тела и описать вращение тела относительно любой произвольной оси.
4.6. Теорема Кёнига
Определим, как изменяется кинетическая энергия тела при переходе из одной системы координат в другую. Поскольку ранее уже были показаны особые свойства центра масс, то свяжем одну из систем отсчета с центром масс С (рис. 4.10) и рассмотрим кинетическую энергию материальной точки массой dm в системе отсчета (X,Y,Z).
|
|
|
º |
|
Скорость точки в этой системе отсчета определена как |
º |
= |
d r |
, где |
v |
--------- |
|||
|
|
|
d t |
|
ºr — радиус-вектор точки. Положение центра масс в этой системе
определяется радиусом-вектором ºrC , а положение точки относи-
тельно центра масс — радиусом-вектором ºr1 . Поскольку ºr =
º |
º |
º |
º |
º |
º |
|
= rC |
+ r1 |
, то v |
= vC |
+ v1 |
, где vC |
— скорость центра масс в сис- |
º
теме (X,Y,Z), а v1 — скорость материальной точки относительно
центра масс. Тогда кинетическая энергия точки в системе (X,Y,Z) вычислится следующим образом:
|
1 |
|
2 |
|
1 |
º |
2 |
|
1 |
º |
º 2 |
dWк = |
---- |
v |
dm = |
---- |
v |
dm = |
---- |
( vC |
+ v1 ) dm . |
||
2 |
|
2 |
|
2 |
|||||||
|
|
|
|
Z |
dm |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
r |
|
|
|
Z' |
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rC |
|
C |
|
|
Y' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
X' |
|
|
|
|
|
|
Y |
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4. 10 |
|
|
|
||
61
Определим кинетическую энергию тела массой М, состоящего из совокупности материальных точек:
----1 |
º |
+ |
Wк = ∫ 2 |
( vC |
M
º 2 |
|
1 |
v1 ) |
dm = ∫ |
---- |
2 |
M
º2 |
º º |
º2 |
( v1 |
+ 2 vC v1 |
+ vC ) dm . |
Вспомним, что, согласно § 2.5, в произвольной системе координат скорость центра масс равна
|
1 |
∫ v dm . |
|
vC = |
---- |
||
M |
|||
|
M |
||
|
|
Тогда
Wк = |
----1 |
º2 |
dm + |
2 |
∫ v 1 |
M
1 ∫ º º
---- 2 v C v 1 dm + 2
M
1 ∫ º2
---- v C dm = 2
M
= |
----1 |
º2 |
|
º |
º |
||
2 |
∫ |
v |
1 |
dm + v C ∫ |
v 1 dm |
||
|
|
M |
|
|
|
M |
|
|
|
1 |
|
|
2 |
º |
º |
|
= |
---- |
∫ v1 |
dm + v C M vC1 |
|||
|
2 |
|
|||||
M
+ |
----1 |
∫ |
º2 |
dm = |
2 |
v C |
|||
|
|
M |
|
|
|
1 |
|
2 |
|
+ |
---- |
∫ vC dm, |
||
2 |
||||
M
º
где vC1 — скорость центра масс относительно центра масс, очевидно равная нулю. Поэтому
1 Wк = ---- ∫
2
M
2 |
1 |
2 |
v1 dm + |
---- |
∫ vC dm = Wк отн + Wк ц.м . (4.19) |
2 |
M
Кинетическая энергия системы материальных точек есть сумма кинетической энергии ее движения относительно центра масс и кинетической энергии, которой обладала бы она, двигаясь поступательно со скоростью центра масс. Это утверждение получило название теоремы Ф. Кёнига (1774 — 1833).
4.7. Кинетическая энергия вращающегося тела
Рассмотрим вращение тела вокруг оси, проходящей через центр масс, и определим кинетическую энергию тела. Воспользуемся доказанной теоремой Кёнига. Поскольку центр масс при таком движении тела не совершает поступательного движения, то Wк ц.м = 0. Поэтому
Wк = Wк отн — кинетическая энергия вращения относительно центра масс. Вычислим ее согласно (4.19):
|
1 |
2 |
|
1 |
º2 |
1 |
º º |
Wк отн = |
---- |
∫ v1 |
dm = |
---- |
∫ v 1 dm = |
---- |
∫ ( v 1, v 1 ) dm, |
2 |
2 |
2 |
|||||
|
|
M |
|
|
M |
|
M |
62
º
где v1 — линейная скорость материальной точки dm при ее вращении вокруг центра масс. Если вращение совершается по окружности
|
|
º |
|
|
º |
|
º |
º |
радиуса r с угловой скоростью |
ω |
, то согласно (1.13) |
v1 |
= |
ω × |
r . |
||
Тогда |
|
|
|
|
|
|
|
|
Wк отн = |
----1 |
º º º |
]) dm . |
|
|
|
|
|
2 |
∫ ( v |
1, [ ω, r |
|
|
|
|
||
M
Используя свойство смешанного произведения векторов, получаем
к отн = |
----1 |
º |
º |
º |
]) dm = |
----1 |
º |
º |
º |
]) = |
|
2 |
∫ ( ω, [ r , |
v1 |
2 ∫ |
( ω, [ r , dm v1 |
|||||||
|
|
M |
|
|
|
|
M |
|
|
|
|
|
|
|
|
1 |
|
º |
º |
|
|
|
|
|
|
|
= |
---- |
∫ ( ω, |
d L ) . |
|
|
|
||
|
|
|
2 |
|
|
|
|
||||
M
Поскольку при вращении тела угловые скорости всех его материальных точек одинаковы, то
|
1 |
º º |
|
1 |
ºº |
|
1 |
|
Wк отн = |
---- |
ω ∫ d L |
= |
---- |
ω L |
= |
---- |
ωzLz . |
2 |
2 |
2 |
M
Так как Lz = Iz ωz , то
|
1 |
2 |
|
Wк отн = |
---- |
Izωz . |
(4.20) |
2 |
Таким образом, кинетическая энергия тела, вращающегося вокруг оси, проходящей через центр масс, равна половине произведения момента инерции тела относительно этой оси на квадрат угловой скорости вращения вокруг этой оси.
Попробуем получить этот результат иначе, исходя из теоремы об изменении кинетической энергии. Разобьем тело на элементарные
º
массы, каждая из которых при вращении имеет скорость v i и
º
совершает за время dt перемещение d l i . Тогда элементарная работа равнодействующей силы по перемещению i-й точки будет dA =
º |
º |
º |
º |
d t). Поскольку равнодействующая всех сил |
= ( R |
, d l i |
) = ( R |
, v i |
определяется векторной суммой внешних и всех внутренних сил, действующих на i-ю точку, то
º dAi = Fi
º |
º |
|
º º |
|
º º |
|
||
+ ∑ f |
ik |
, v i |
d t |
= ( Fi, v i |
d t) + |
∑ f |
ik, v i |
d t . |
k |
|
|
|
|
|
k |
|
|
63
|
º |
|
º º |
|
|
|
Поскольку |
v i |
= |
ω × r i , то |
|
||
|
|
º |
º |
º |
|
º |
dAi = ( Fi |
, [ ω , |
r i |
] d t) + |
∑ f ik |
||
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
º º |
|
, [ ω , r |
] d t , или |
i |
|
|
|
º |
|
|
|
|
º |
|
|
|
º º |
º |
º |
|
|
|||||
dAi = ( ω, [ r i |
, Fi |
] d t) + |
ω, |
|
r i, ∑ f ik |
|
d t , |
(4.21) |
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
что следует из свойства смешанного произведения векторов.
Просуммируем последнее выражение по всем точкам тела. Вычислим сумму всех первых слагаемых (4.21):
|
|
|
º |
º |
º |
] d t) |
º |
º |
, |
º |
|
|
ºº |
||||||
|
|
∑( ω, [ r i |
, |
Fi |
= ω∑[ r i |
Fi ] d t = |
ω Mвнеш dt . |
||||||||||||
|
|
|
i |
|
|
|
|
|
|
i |
|
|
|
|
|
||||
|
Сумму всех вторых слагаемых (4.21) можно вычислить так: |
||||||||||||||||||
|
|
|
|
|
|
º |
|
|
|
|
|
|
|
|
º |
|
|
ºº |
|
|
º |
|
º |
|
|
º |
|
º |
|
|
|
||||||||
∑ |
ω, |
|
|
r i, |
∑ f |
ik |
|
d t = |
ω ∑ |
|
|
r i, ∑ f ik |
d t |
= ω Mвнут dt = 0 , |
|||||
i |
|
|
|
|
|
k |
|
|
|
|
i |
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
поскольку суммарный момент внутренних сил системы материальных точек равен нулю (см. § 4.2). Тогда
ºº |
º |
º |
º º |
dAi = ω Mвнеш dt = Mвнеш |
ω dt = Mвнеш d ϕ , |
||
где dºϕ — угловое перемещение тела за время dt.
Работа по вращению тела вокруг оси Z:
|
dω |
ω dt = Iz ωdω . |
dA = M |
------ |
|
внеш dϕ = Iz εzω d t = Iz dt |
Проинтегрировав полученное выражение, найдем полную работу
2ω2
A = ∫ dA = ∫
1ω1
Iz |
ωdω = Iz |
ω22 |
– |
ω12 |
|
|
|
------ |
------ |
. |
|||
|
|
|
2 |
|
2 |
|
По теореме об изменении кинетической энергии (3.6) A = Wк = = Wк 2 – Wк 1, поэтому
|
1 |
2 |
|
Wк = |
---- |
Iz ωz . |
(4.22) |
2 |
64
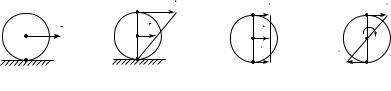
4.8. Плоское движение твердого тела (качение)
Рассмотрим кинематику и динамику частного случая плоского движения, а именно качения. Плоским называется такое движение твердого тела, при котором все его точки перемещаются в параллельных плоскостях. Примером плоского движения является качение симметричного тела (цилиндра, шара, диска) по плоскости (рис. 4.11). Пусть качение происходит без проскальзывания. В этом случае скорость точек катящегося тела, соприкасающихся с плоско-
º
стью, равна нулю ( v A = 0 ). Как уже говорилось (см. § 1.6), любое
движение твердого тела можно представить как совокупность двух движений: поступательного и вращательного. Например, качение цилиндра (рис. 4.12, а) можно представить как сумму поступательного движения его со скоростью, равной скорости центра масс С (рис. 4.12, б), и одновременного вращения относительно оси, перпендикулярной плоскости рисунка и проходящей через центр масс (рис. 4.12, в).
Скорость любой точки катящегося цилиндра можно представить
в виде |
º |
= |
º |
+ |
º |
. Здесь |
º |
— скорость поступательного движе- |
v |
v п |
v в |
v п |
ния, которая одинакова для любой точки и равна скорости центра
º |
º |
|
|
масс v C , а |
v в — скорость вращательного движения относительно |
||
оси Z, направленной на рис. 4.12, в «от нас» и проходящей через |
|||
|
º |
º |
º |
точку С. Так как v A = 0 , а векторы |
v в и |
v п в точке А противона- |
|
правлены, то модули этих векторов одинаковы: vп = vв . В точке D
|
º |
|
º |
º |
º |
векторы |
v в |
и |
v п |
сонаправлены, поэтому v |
D = 2 v C. |
Найдем кинетическую энергию катящегося цилиндра. Для этого разобьем цилиндр на множество элементарных масс и найдем кине-
|
D |
|
2vC |
D vп |
|
D |
vв |
v |
C |
vC |
= |
vC |
+ |
C |
|
C |
|
C |
|
||||
|
|
|
|
vп |
|
vв |
|
|
|
|
|
|
|
|
|
A |
A |
|
|
A |
|
A |
|
Рис. 4. 11 |
a) |
|
|
б ) |
|
в) |
|
|
|
|
|
|
|
|
Рис. 4. 12
65