Материал: Общая физика_под ред. Белокопытова_2016 -506с
Z |
Z |
|
|
||
R |
|
|
dz |
r |
|
z |
dr |
|
L |
||
L |
||
Y |
||
|
Y |
|
X |
|
|
|
X |
|
Рис. 4. 6 |
Рис. 4. 7 |
|
|
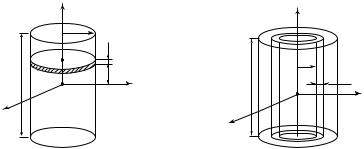
через центр масс цилиндра массой М радиусом R и высотой L (рис. 4.6), причем L >> R.
При повороте цилиндра вокруг осей X и Y моменты инерции получатся одинаковыми, поскольку такие вращательные движения ничем не отличаются одни от другого. Для того чтобы воспользоваться формулой (4.17), разобьем цилиндр на точечные элементарные массы dm — одинаковые тонкие диски, параллельные основаниям цилиндра. Толщина дисков составит d z, а удаление диска от оси вращения z. Обозначив плотность цилиндра через ρ, определим
массу такого тонкого диска: dm = ρπR 2d z. При подобном разбиении rB = z. Тогда
|
|
|
|
|
L ⁄ |
2 |
|
|
|
|
|
|
|
|
|
Ix = Iy = ∫ z2 dm = ∫ |
|
|
z2ρπR2 dz = |
|
|
||||||||||
|
|
|
|
|
(–L) ⁄ 2 |
|
|
|
|
|
|
|
|||
|
2 |
L ⁄ |
2 |
2 |
|
|
1 |
|
2 |
|
3 |
|
|
|
|
= ρπR |
∫ |
z |
dz = |
|
ρπR |
L |
. |
|
|
||||||
|
|
12 |
|
|
|
|
|||||||||
|
|
|
|
|
|
----- |
|
|
|
|
|
|
|
||
|
|
–L ⁄ 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
1 |
2 |
Поскольку масса цилиндра M = ρπR L |
, то Ix |
= Iy = |
----- |
ML . |
|||||||||||
12 |
|||||||||||||||
Как видно, радиус цилиндра при его вращении вокруг этих осей не влияет на момент инерции, поэтому данная формула справедлива и для определения момента инерции тонкого стержня, вращающегося вокруг оси, проходящей через центр масс перпендикулярно стержню.
Для определения момента инерции цилиндра относительно оси Z разобьем исходный цилиндр на тонкие цилиндрические слои радиу-
56
сом r и толщиной d r (рис. 4.7). Масса такого слоя dm = ρL2πr d r . При подобном разбиении rB = r. Следовательно,
|
|
|
R |
|
ρL2πr dr = |
1 |
πρLR |
4 |
|
1 |
|
2 |
|
|
Iz |
= ∫ r |
2 |
dm = ∫ r |
2 |
= |
MR |
. |
|||||||
2 |
|
2 |
|
|||||||||||
|
|
|
|
---- |
|
|
|
---- |
|
|
|
|||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
Как следует из полученной формулы, длина цилиндра при его вращении вокруг продольной оси не влияет на момент инерции, поэтому данная формула справедлива и для определения момента инерции диска произвольной толщины при его вращении вокруг оси, проходящей через центр масс перпендикулярно основанию диска.
В последнем выводе мы использовали разбиение цилиндра на тонкие элементарные цилиндрические слои, причем момент инерции
такого слоя определялся как d I = r 2dm. Поэтому можно сказать, что момент инерции тонкой цилиндрической трубы относительно ее продольной оси составляет
Iz = MR 2.
Очевидно, что этим выражением можно пользоваться и для определения момента инерции тонкого кольца при его вращении вокруг своей оси.
Приведем без вывода формулу определения момента инерции шара радиусом R и массой М относительно оси, совпадающей с его любым диаметром:
|
|
|
2 |
|
|
2 |
|
|
|
|
Iz = |
---- |
MR . |
|
|
||||
|
|
5 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
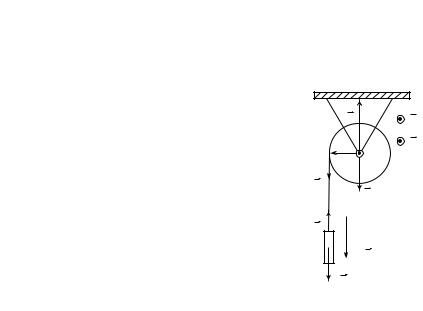
Пример 4.1. Рассмотрим задачу о вращении тела. Пусть на мас- |
|||||||||
сивный блок, выполненный в виде диска радиусом R и массой М и |
|||||||||
закрепленный на оси, намотана нерастяжимая |
|
|
|||||||
невесомая нить, к концу которой привязан груз |
|
|
|||||||
массой т (рис. 4.8). Как определить ускорение |
N |
ε |
|||||||
груза при его движении вниз ? |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
Расставим силы, действующие на тела этой |
M |
MT |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
º |
|
Z |
системы. На груз действуют сила тяжести m g и |
R |
|
|||||||
|
|
|
|
|
|
|
|
|
|
º |
|
|
|
|
|
|
|
|
|
сила натяжения нити T . На блок действуют |
T |
Mg |
|||||||
|
|
|
|
|
º |
|
|
||
º |
|
|
|
|
|
|
|
||
реакции |
N |
|
и сила |
|
|
||||
сила тяжести M g , сила |
|
|
|
||||||
º |
|
|
|
|
|
|
|
T |
|
натяжения нити T . Уравнение второго закона |
|
|
|||||||
Ньютона для поступательного движения груза |
m |
a |
|||||||
º |
º |
+ |
º |
. Блок не |
mg |
|
|||
записывается в виде: m a |
= m g |
|
T |
|
|||||
совершает поступательного движения, а враща- |
Рис. 4. 8 |
||||||||
ется вокруг оси. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
57
Укажем на рис. 4.8, что направление оси Z — это направление вдоль оси диска «на нас». Тогда из всех сил, действующих на блок
º
момент относительно этой оси создает только сила T : MT = TR.
Поскольку другие силы проходят через ось вращения, то их плечи равны нулю. Заметим также, что вектор момента силы натяжения направлен «на нас» (предлагаем доказать это вам самостоятельно, используя определение векторного произведения). Кроме того, при ускоренном вращении блока в направлении против часовой стрелки,
º |
|
|
|
|
вектор его углового ускорения ε |
также направлен «на нас» (см. |
|||
|
º |
|
º |
|
рис. 1.12). Таким образом проекции векторов MT |
и |
ε |
на направление |
|
выбранной оси Z положительны.
Основное уравнение динамики вращения для блока запишется следующим образом: MT z = Iz εz . Чтобы учесть связь линейного уско-
рения движения груза и углового ускорения блока, воспользуемся
º |
º |
º |
|
|
|
|
|
|
|
|
|
соотношением (1.15): aτ |
= ε |
× r |
|
. В результате таких рассуждений |
|||||||
получаем систему уравнений в векторном виде: |
|
|
|
|
|||||||
|
º |
|
º |
+ |
º |
|
|
|
|
||
|
m a |
= m g |
|
T ; |
|
|
|
|
|||
|
MTz = Izεz; |
|
|
|
|
|
|||||
|
º |
º |
× |
º |
|
|
|
|
|
||
|
aτ = |
ε |
|
r , |
|
|
|
|
|
||
и скалярном виде |
|
|
|
|
|
|
|
|
|
|
|
|
ma = mg – T; |
|
|
|
|
||||||
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
TR |
---- |
MR |
ε ; |
|
|
|
|
|||
|
= 2 |
|
|
|
|
|
|||||
|
a = εR. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1 |
|
MRε , |
Из второго уравнения последней системы получаем T = |
---- |
||||||||||
2 |
|
||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
---- |
Ma . Подставляя это |
|||
а с учетом третьего уравнения системы T = 2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
выражение в первое уравнение системы, находим ma = mg |
– |
---- |
|||||||||
|
2 Ma . |
||||||||||
|
|
|
|
|
|
|
|
2m |
|
|
|
Из этого уравнения находим ускорение груза: a = ------------------- g .
2m + M
58
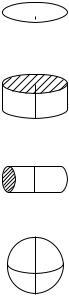
Запишем в виде таблицы выражения, полученные для расчета моментов инерции различных тел, обладающих осью симметрии:
Тело |
Расположение оси вращения Z |
Параметры тела |
Момент инерции |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Кольцо |
Z |
|
|
|
Масса М, |
Iz = MR |
2 |
|
|||
|
|
|
|||||||||
|
|
|
|
|
радиус R |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Диск, |
Z |
|
|
|
Масса М, |
|
|
1 |
|
|
2 |
цилиндр |
|
|
|
радиус R |
Iz |
= |
---- |
MR |
|
||
|
|
|
|
2 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Стержень |
Z |
|
|
|
Масса М, |
|
|
1 |
|
|
2 |
|
|
|
|
|
длина L |
Iz |
= |
----- |
ML |
|
|
|
|
|
|
|
12 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шар |
Z |
|
|
Масса М, |
|
|
2 |
|
|
2 |
|
|
|
|
радиус R |
Iz |
= |
---- |
MR |
|
|||
|
|
|
|
|
5 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.5.Теорема Гюйгенса—Штейнера
В§ 4.4 было дано определение момента инерции твердого тела относительно произвольной оси. Поскольку расположение оси вращения относительно тела может быть в общем случае произвольным, то моментов инерции у твердого тела может быть бесконечно много (в то время как масса — только одна). Мы также определили моменты инерции различных симметричных тел относительно осей вращения, проходящих через центр масс таких тел. Нельзя ли воспользоваться полученными результатами и связать момент инерции тела относительно произвольной оси с моментом инерции тела относительно оси, проходящей через центр масс? Ответ на этот вопрос дает теорема Гюйгенса — Штейнера.
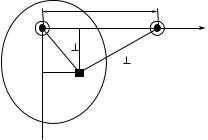
Рассмотрим твердое тело, способное вращаться вокруг оси Z, проходящей через точку С — центр масс тела (рис. 4.9). Допустим, что известен IzC — момент инерции тела относительно этой оси. Если мы
59
|
|
a |
|
C |
y |
O |
|
Z |
r |
Z' |
Y |
|
|||
x |
|
R |
|
|
|
|
|
|
dm |
|
|
X 
Рис. 4. 9
хотим определить Iz′ — момент инерции тела при его вращении вок-
руг оси Z′, проходящей через точку О параллельно оси Z на расстоянии а от нее, то в целях его определения разобьем тело на элементарные точечные массы dт. Положение такой элементарной массы в изображенной на рис. 4.9 системе координат задается координатами x и y. Тогда, в соответствии с (4.17),
Iz′ = ∫ RB2 dm = ∫ [x2 + (a – y)2 ] dm =
MM
=∫ [x2 + y2 ] dm + ∫ a2 dm – 2 ∫ ay dm .
M M M
Рассмотрим последнее слагаемое полученного выражения. Вспомнив определение центра масс системы материальных точек (2.12), нетрудно увидеть, что yC — координата центра масс — опре-
1 N
деляется следующим образом: yC = ---- ∑ mi yi . Однако для твердого
M
i = 1
тела при разбиении его на материальные точки N → ×. Поэтому
1
yC = ---- ∫ y dm , а следовательно, ∫ y dm = MyC . Тогда
M M M
Iz′ = ∫ rB2 dm + a2 ∫ dm – 2a ∫ y dm = IzC + a2M – 2aMyC .
MM M
Поскольку в выбранной системе координат (рис. 4.9) yC = 0, то
I |
= I |
+ Ma2 . |
(4.18) |
z′ |
zC |
|
|
Таким образом доказана теорема Гюйгенса — Штейнера:
момент инерции тела относительно произвольной оси равен сумме момента инерции тела относительно оси, параллельной данной и
60