Материал: Методичка

16
x11 |
+ x31 |
=1, |
|
|
x22 |
+ x32 |
=1, |
(1.17) |
|
x13 |
=1, |
|
|
|
3x22 +10x13 + 6x32 |
≤15 , |
|||
1,5x22 |
+ 6x31 + 3x32 |
≤8 , |
||
18x11 |
+1,5x22 + 6x31 ≤19 . |
|||
Последнюю систему неравенств преобразуем в систему равенств, введя новые неотрицательные переменные y1 , y2 , y3 .
y1 =15 − 3x22 −10x13 − 6x32 , |
|
||
y2 |
=8 −1,5x22 |
− 6x31 − 3x32 , |
(1.18) |
y3 |
=19 −18x11 |
−1,5x22 − 6x31 . |
|
Таким образом, (1.17) и (1.18) образуют систему из 6 уравнений с 8
неизвестными: x11 , x31 , x22 , x32 , x13 , y1 , y2 , y3 . Применим геометрический способ решения. Выберем 2 свободных переменных x31 и x32 . Остальные 6 будут базисными. Выразим базисные переменные через свободные
|
|
x11 =1 − x31 , y1 = 2 − 3x32 , |
|
|
||||
|
|
x22 |
=1 − x32 , |
y2 |
= 6,5 − 6x31 −1,5x32 , |
|
||
|
|
x13 |
=1, |
|
y3 |
= −0,5 +12x31 |
+1,5x32 |
|
Из |
условия |
неотрицательности |
|
базисных |
переменных |
получаем |
||
|
|
x31 ≤1, |
x32 |
≤ −4x31 + 4,33; |
|
|
||
|
|
x32 |
≤1, |
x32 |
≥ 0,3 −8x31 ; |
|
|
|
|
|
x32 |
≤ 0,66 . |
|
|
|
|
|
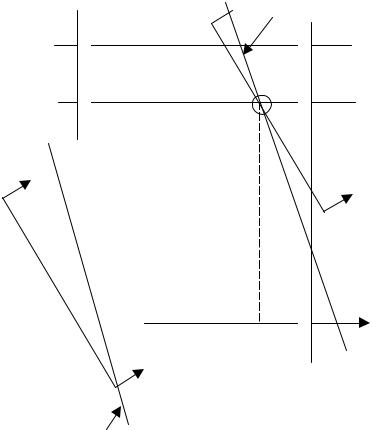
Графически эти условия изображены на рис.1.4. |
|
|
||||||
Функция цели, выраженная через свободные переменные, равна |
|
|||||||
|
L = 0,82 + 0,12x31 + 0,06x32 , |
|
|
|
|
|
||
|
L' = L − 0,82 = 0,12x31 + 0,06x32 |
|
|
|
|
|||
и основная прямая L' = 0 имеет вид x32 |
= −2x31 . Из рис.1.4 видно, что максимум L' и |
|||||||
L достигается в точке F . Таким образом, решение задачи:
|
|
|
17 |
x31 |
= 0,92; |
x22 |
= 0,34; |
x32 |
= 0,66; |
x13 |
=1; |
x11 = 0,08; |
L = 0,82 + 0,12 0,92 + 0,06 0,66 = 0,97 |
||
Следовательно, при выбранной оптимальной схеме лечения относительное число выздоровевших больных максимально и составляет 97%.
 x32
x32  x32=-4x31+4,33
x32=-4x31+4,33
1,0 |
|
|
0,66 |
F |
|
|
ОДР |
L’=max |
|
|
|
L’=0 |
|
|
|
|
x31 |
|
0,92 |
1,0 |
x32=-8x31+0,5
Рис.1.4
2. УПРАВЛЕНИЕ СОСТОЯНИЕМ ОРГАНИЗМА В БИОТЕХНИЧЕСКИХ СИСТЕМАХ НА ОСНОВЕ ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
2.1. Метод динамического программирования
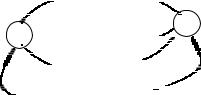
Рассмотрим управляемый процесс, который переводит некоторую систему G
из начального состояния S0 в конечное состояние Sm . При наличии промежуточных состояний такой перевод представляется в виде траектории, состоящей из
18
конкретной последовательности промежуточных состояний (рис.2.1). Если промежуточные состояния могут быть различными, то траектория перевода G из S0
в Sm неоднозначна и зависит от вырабатываемых управляющих воздействий x .
Введя какую-либо целевую функцию W =W (x), зависящую от выбранного управления x , можно сравнивать (по величине W ) траектории друг с другом и ставить задачу об отыскании оптимальной траектории, при которой достигается экстремум W . В зависимости от содержания целевой функции в процессе
оптимизации |
ее |
стремятся |
либо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(x') |
|
||||||||||||||||||||
максимизировать, либо минимизировать. Мы |
|
|
|
|
|
|
x |
' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Sm |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
далее будем рассматривать оптимизацию, |
S0 |
|
|
|
|
|
|
|
x'' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W(x'') |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
при которой |
W → min . |
Таким |
образом, |
|
|
|
|
|
|
|
|
|
|
x* |
|
|
|
|
|
|
|
|
|
|
|
|
|
W* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
задача |
заключается |
в |
отыскании |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
x''' |
|
|
|
|
|
|
|
|
|
|
|
|
|
W(x''') |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
оптимального управления |
x *, |
при котором |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
целевая |
функция |
W достигает |
своего |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2.1 |
|
|||||||||||||||||||||||||||||||||
минимального значения W * , т.е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
W* = min{W (x)}.
x
Представим себе теперь процесс управления состоящим из конечного числа последовательных шагов. В этом случае траектория перехода G из S0 в Sm будет иметь вид последовательности промежуточных состояний S0 , S1 , S2 ,K, Sm , которая является результатом пошагового управления x , также имеющего вид последовательности x = x1 , x2 ,K, xm . Будет считать, что Si обозначает состояние системы G , а xi - управление на i-м шаге для произвольной траектории. Для конкретной же траектории конкретное управление xi' переводит G в конкретное состояние Si' . Нужно иметь в виду, что управления x1 , x2 ,K, xm в общем случае не числа, а вектора, функции, какие-либо предписания и т.п. Пусть на каждом отдельном i-м шаге, заключающемся в переходе из Si−1 в Si , известно значение целевой функции W которое обозначается wi . Считая выбранный критерий W
аддитивным, т.е. полагая, что
19
m
W= ∑wi ,
i=1
задача оптимизации формулируется следующим образом. Требуется найти такое оптимальное управление x* = x1 , x2 ,K, xm (где xi - оптимальное шаговое управление на i-м шаге), при котором целевая функция W принимает минимальное значение, т.е.
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
W = ∑wi min . |
|
|
|
|
|
|
|||||
|
|
i=1 |
|
|
|
|
|
|
|
|
|
|
Последовательность оптимальный |
шаговых |
управлений x , x ,K, x |
приводит к |
|||||||||
|
|
|
|
|
|
|
1 2 |
|
|
m |
|
|
оптимальной траектории S |
0 |
, S * , S * |
,K, S * |
, S |
m |
перевода G из S |
0 |
в S |
m |
. |
|
|
|
1 2 |
|
m−1 |
|
|
|
|
|
||||
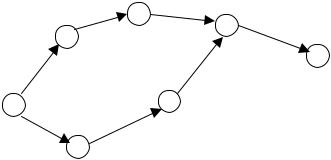
Для примера, приведенного на рис.2.2, существует два варианта управлений и две возможных траектории, для каждой из которых можно подсчитать значение целевой функции.
|
|
I вариант |
|
II вариант |
|
||||
Управление: |
x'= x1' , x2' , x3' |
, x4 |
|
x''= x1'' , x2'' , x3'' , x4 |
|
|
|||
Траектория: |
S0 , S1' , S2' , S3 , S4 |
|
S0 , S1'' , S2'' , S3 , S4 |
|
|
||||
Целевая функция: |
W '= w' |
+ w' |
+ w' |
+ w |
W ''= w'' + w'' |
+ w'' |
+ w |
|
|
|
4 |
||||||||
|
1 |
2 |
3 |
4 |
1 |
2 |
3 |
|
|
Пусть W '>W '' ; тогда второй вариант является оптимальным, т.е. x* = x'', W* =W '' .
Поиск |
оптимального |
управления |
x * |
|
методом |
динамического |
|
|
|
|
S ' |
|
|
|
|
|
' |
w2' |
2 w3' |
S3 |
|
|
|
|
S1 |
|
|
w4 |
|
|
|
|
|
|
|
|
S4 |
|
|
|
|
|
|
|
|
|
|
|
w' |
|
w'' |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
S0 |
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S2'' |
|
|
|
|
|
w'' |
|
w'' |
|
|
|
|
|
1 |
|
2 |
|
|
|
|
S1''
Рис. 2.2
20
программирования основан на использовании общего принципа, известного как принцип оптимальности. Он формулируется так [7]:
Каково бы ни было состояние S системы G в результате какого-то числа шагов, мы должны выбирать управление на ближайшем шаге так, чтобы оно в совокупности с оптимальным управлением на всех последующих шагах приводило к минимальному значению целевой функции на всех оставшихся шагах, включая данный.
При решении задач динамического программирования полезно пользоваться схемой решения, данной в [6,7]. После выбора способа описания состояний управляемой системы и разбиения всего процесса управления на шаги применяется следующая процедура [7].
1. Перечислить набор шаговых управлений xi для каждого шага и налагаемые на них ограничения.
2. Для каждого i-го шага определить значение wi в функции от состояния Si−1
на (i −1)-м шаге и от шагового управления xi
wi = fi (Si−1 , xi ). |
|
3. Определить, как изменяется состояние Si−1 системы G |
под влиянием |
управления xi на i-м шаге: оно переходит в новое состояние |
|
Si =ϕi (Si−1 , xi ) |
(2.1) |
4. Пусть Wi (Si−1 ) - условный оптимум целевой функции, получаемый на всех последующих шагах, начиная с i-го и до конца. Надо записать основное рекуррентное уравнение динамического программирования, выражающее Wi (Si−1 )
через уже известную функцию Wi+1 (Si ) |
|
Wi (Si−1 )= min{fi (Si−1 , xi )+Wi+1 (ϕi (Si−1 , xi ))}. |
(2.2) |
xi |
|
Этому условному оптимуму целевой функции соответствует условное оптимальное управление на i-м шаге xi (Si−1 ), которое совместно с оптимальным управлением на всех последующих шагах обращает целевую функцию на всех оставшихся шагах, начиная с данного, в минимум.