Материал: mekhatronika_UrGUPS
чае модель внешней среды представляет собой карту местности, которая помимо априорных сведений составляется и уточняется в ходе движения на основе сенсорной информации (радиотехнические, лазерные, ультразвуковые локаторы, системы технического зрения). Такая модель должна иметь как минимум два уровня по масштабу: первый – в пределах достигаемости сенсорных систем, второй – непосредственно перед роботом.
Модель первого уровня местности служит для прокладки маршрута движения в соответствии с заданной целью. Это задача навигации. Варианты целей:
–поиск конкретных объектов (по заданным признакам);
–достижение определенной точки на местности, заданной координатами;
–движение по заданному маршруту, например, для выполнения определенной технологической операции (инспекция, нанесения покрытия, очистка и т. д.).
Вторая, более подробная модель ближайшего участка местности необходима для уточнения маршрута непосредственно перед роботом с учетом препятствий, не отмеченных на карте местности первого уровня. В целом – это задача обеспечения безопасности движения.
Для гарантированного решения последней задачи может потребоваться специальная система обеспечения безопасности, которая контролирует:
–углы наклона шасси робота, не допуская превышения их критических значений, определяемых условиями опрокидывания;
–опасные вертикальные провалы и трещины непосредственно перед роботом;
–оценивает свойства грунта в отношении его проходимости;
–обеспечивает аварийную остановку робота по сигналу дистанционного или контактного датчика препятствий, возникающих непосредственно перед роботом.
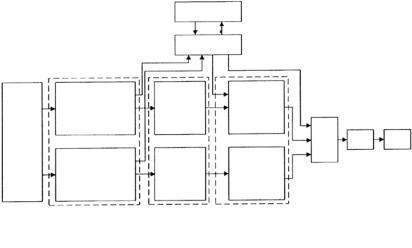
Типовая схема системы управления движением мобильного робота приведена на рис. 4.40.
Блок управления движением (БУД) осуществляет управление тяговыми приводами и приводами поворота шасси. Блок планирования движения осуществляет построение траектории движения, оптимизируя ее по минимуму расхода энергии, что особенно важно для роботов с автономным энергопитанием, или по минимуму времени выполнения задания, когда в постановку задачи входит условие обеспечения максимального быстродействия.
101
Оператор
Каналы связи
Внешняя среда
Сенсорные систе- |
Построе- |
|
|
|
мы дальнего дей- |
Построение |
|
|
|
ние кар- |
|
|
||
ствия с перера- |
|
|
||
ты местно- |
маршрута |
|
|
|
боткой сенсорной |
|
|
||
сти |
|
|
|
|
информации |
|
|
|
|
|
БУД |
П |
МС |
|
|
|
|||
Сенсорные систе- |
Построе- |
Построение |
|
|
мы ближнего дей- |
плана обхо- |
|
|
|
ние плана |
|
|
||
ствия и датчики |
да и преодо- |
|
|
|
ближай- |
|
|
||
системы безопас- |
ления пре- |
|
|
|
шей зоны |
|
|
||
ности |
пятствий |
|
|
|
|
|
|
||
Сенсорные |
Построение |
Планирование |
|
|
системы |
модели |
движения |
|
|
|
местности |
|
|
|
Рис. 4.40. Функциональная схема управления движением по местности мобильного робота:
БУД – блок управления движением; П – приводы; МС – механическая система
Блок построения модели местности представляет ее в форме, удобной для решения задачи синтеза траектории движения с выделением непреодолимых препятствий и опасных или неясных участков.
Если выполнение задачи требует знания большего участка местности, чем дают сенсорные системы в начальном положении робота, т. е. до начала движения, карта местности формируется и передается в блок планирования фрагментами по мере передвижения робота. В этом случае первое приближение для всей траектории делается по имеющейся априорной информации о местности или, как минимум, определяется только общее направление движения.
На нижнем общесистемном уровне системы находится канал управления движением в ближней зоне, включающей в себя наиболее детальную модель этой зоны и реализующий алгоритмы обеспечения безопасности движения.
Требуемый уровень адаптации и искусственного интеллекта системы определяется степенью неопределенности и сложности местности, а также характером подлежащих выполнению заданий. В последнем отношении основное значение имеет минимально необходимая степень автономности управления роботом, определяемая перечнем его
102
действий, которые должны выполняться без участия человека-опера- тора. При этом учитывается и возможность временной потери связи
соператором, ограниченная пропускная способность каналов связи, неполнота и ограниченная достоверность получаемой оператором от робота информации и ее задержка во времени. Например, если из-за высокого уровня помех в канале передачи оператор не получает изображения панорамы местности перед роботом или только эпизодически получает эту информацию, он имеет возможность вмешиваться в автономное движение робота только для контроля и корректировки маршрута движения путем целеуказания отдельных промежуточных точек трассы в моменты ее достоверного наблюдения.
Вкачестве конкретного примера приведем систему управления автономного транспортного робота [20].
На кафедре «Проблемы управления» (МГТУ МИРЭА – Московский государственный технический университет радиотехники, электроники и автоматики) разработан автономный транспортный робот
синтеллектуальной системой управления, позволяющий обследовать труднодоступные скрытые полости, например, при проведении геоло- го-разведывательных работ или инспекции трубопроводов. Помимо этого данный робот можно широко использовать в учебном процессе и в различных научно-исследовательских работах, например, в разработке и исследовании алгоритмов группового управления. Данный робот обладает небольшими габаритами и массой, но при этом имеет возможность относительно длительного времени работы, а также перемещения без каких-либо затруднений по неровной поверхности под различными углами к плоскости горизонта.
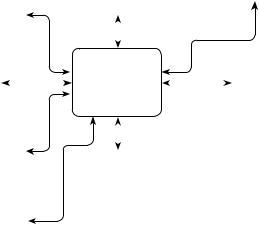
Отличительной особенностью конструкции является ее модульность, обеспечивающая быструю замену любого узла как в случае выхода из строя, так и при наделении робота дополнительными возможностями, например, замены гусеничного привода на колесный и т. д. Модульность конструкции достигается за счет унификации стыковочных узлов на механическом, аппаратном и программном уровнях. Разработанная конструкция состоит из семи основных узлов (рис. 4.41):
– мехатронный модуль привода правый;
– мехатронный модуль привода левый;
– модуль питания;
– модуль навигационной системы;
– модуль поведенческой системы управления;
– модуль технического зрения передний;
– модуль технического зрения задний.
103
|
|
|
|
|
|
|
|
|
|
|
|
Удаленный |
|
|
|
|
|
|
|
|
|
Мехатронный |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
терминал |
|
|||
|
|
|
|
|
|
|
модуль привода |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Модуль |
|
|
левый |
|
|
|
|
|
|
|||
|
|
навигационной |
|
|
|
|
|
|
|
|
|
|
||
|
|
системы |
|
|
|
|
|
WI-FI |
||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль |
|
|
|
|
Модуль |
|
|
|
|
Модуль |
||
технического |
|
|
|
|
поведенческой |
|
|
|
|
технического |
||||
зрения заданий |
|
|
|
|
системы |
|
|
|
|
зрения |
||||
|
|
|
|
|
|
|
управления |
|
|
|
|
передний |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модуль |
|
|
|
|
|
|
|
|
|
|
||
|
|
дополнительного |
|
|
|
|
|
|
|
|
|
|
||
|
|
оборудования |
|
|
Мехатронный |
|
|
|
|
Модуль |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
модуль привода |
|
|
|
|
питания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
правый |
|
|
|
|
|
|
|
|
|
USB Flash |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||||||
|
|
накопитель |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.41. Обобщенная структурная схема системы управления автономного мобильного робота
Вмехатронные модули приводов кроме исполнительных двигателей и датчиков конструктивно входят собственные системы управления, обменивающиеся данными с верхним уровнем управления
спомощью специализированного протокола. Данная конструкция легко может быть заменена без изменения программы верхнего уровня управления, например, гусеничный модуль на колесный, один модуль на другой с большими или меньшими габаритами и т. д. Это достигается за счет того, что обмен, передача данных на исполнение
иотчет о выполнении задания (фактически заданная скорость движения и пройденное расстояние) задаются в абсолютных величинах в системе СИ, вследствие чего она не привязана к типу приводного узла.
Вкачестве питающих элементов данного робота применяются LiPo аккумуляторы, состояние из трех – шести банок и общим напряжением от 12 до 24 В. В зависимости от задачи имеется возможность установки АКБ различной емкости от 1300 до 2400 мАч. Помимо этого робот может быть запитан и от стандартного сетевого адаптера. Переключение между источниками питания, а также заряд и мониторинг
104
АКБ осуществляет модуль питания, который программируется под конкретный тип АКБ. Так же модуль питания осуществляет оценку оставшегося времени работы, которое передает системе управления поведенческого уровня.
Навигационная система, входящая в состав малогабаритного автономного мобильного робота, включает в себя следующие датчики:
–трехкоординатные акселерометры;
–трехкоординатные датчики угловой скорости;
–трехкоординатные датчики магнитного поля;
–двухкоординатный инклинометр;
–барометрический высотомер;
–GPS.
Вкачестве вычислителя для сбора и анализа информации со всех этих датчиков используется цифровой сигнальный процессор, с аппаратной поддержкой операций с плавающей точкой и тактовой частотой 150 МГц – TMS320F28335, производства компании TI. Навигационная система позволяет оценивать абсолютные величины положения
иориентации в пространстве. В основе данной оценки лежит алгоритм определения координат за минимальное время (время, за которое ошибка крайне мала) и сопоставление его с пройденным путем по инкрементным датчикам, установленным в модуле привода, с последующей остановкой робота и обнуления всех значений. Робот может вычислять величину проскальзывания и наклон к плоскости горизонта.
Воснове модуля поведенческой системы управления установлен серийно выпускаемый одноплатный компьютер, под управлением операционной системы Linux Debian 2.6.24. Это обеспечивает помимо гибкости программного обеспечения возможность быстрой модернизации вычислительных средств, по мере выпуска новых аппаратных версий. Этот модуль содержит процессор PXA270 с тактовой частотой до 520 МГц, производимый компанией Intel, 128 Мб ОЗУ, 512 Мб flash памяти, беспроводной модуль 802.11b (Wi-Fi), 3 USB порта и 4 порта RS-232, CIF интерфейс, Ethernet.
Всостав системы технического зрения входит цифровая фото / видеокамера, лазерный модуль и система подсветки окружающей обстановки. 2MPix фото / видеокамера позволяет получать цифровые фотоснимки высокого разрешения и видеопоток меньшего качества. Угол обзора объектива составляет 120°. Выделенный отдельно на структурной схеме USB Flash накопитель, предназначен для сохранения видео, фотоизображений, а также результатов выполненного
105