Материал: mekhatronika_UrGUPS
временных информационных технологий обработки знаний. Существует, по крайней мере, пять различных информационных технологий: экс-
пертные системы, нечеткая логика, нейронные структуры, эволюционные (генетические) алгоритмы и ассоциативная память.
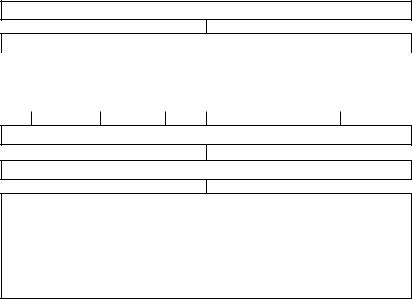
Искусственный интеллект
Манипулирование знаниями
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Представ- |
|
Извлече- |
|
Вывод |
|
Обобщение |
|
Формирование знаний |
|||||
ление зна- |
|
ние зна- |
|
на зна- |
|
и пополне- |
|
в процессе обучения |
|||||
ний |
|
ний |
|
ниях |
|
ние знаний |
|
и самообучения |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Интеллектуальные технологии
Решение прикладных задач
Распознавание образов и анализ изображений Понимание связных текстов
и естественно-языковой человеко-машинный интерфейс Принятие решений
Анализ конфликтных ситуаций Планирование действий и поведения Автоматизация программирования и проектирования Управление сложными динамическими объектами
Рис. 4.36. Общая проблематика теории искусственного интеллекта
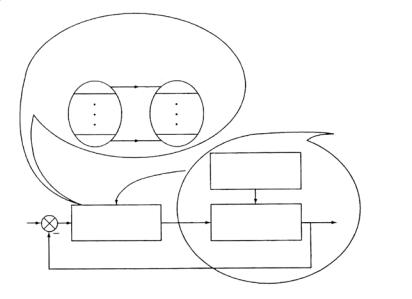
Суть метода ситуационного управления состоит в том, что каждому классу ситуаций, возникновение которых считается допустимым в процессе функционирования системы, ставится в соответствие некоторое решение по управлению (управляющее воздействие, программно-алгоритмическая управляющая процедура и т. д.). Тогда сложившаяся ситуация, определяемая текущим состоянием как самого объекта, так и его внешней среды и идентифицируемая с помощью измерительно-информационных средств, может быть отнесена к некоторому классу, для которого требуемое управление уже считается известным (рис. 4.37).
Таким образом, практическая реализация концепции ситуационного управления на основе современных интеллектуальных технологий предполагает наличие развернутой базы знаний о принципах построения и целях функционирования системы, специфике исполь-
96
зования различных алгоритмов, особенностях исполнительных механизмов и управляемого объекта. В этом случае классификационный анализ имеющихся знаний с учетом текущих показаний измеритель- но-информационных средств должен обеспечивать параметрическую и структурную настройку управляющих алгоритмов, модификацию программы достижения целей управления или их коррекцию.
Классификация
Множество Множество возможных допустимых ситуаций управляющих
решений
S U
Текущая
ситуация
|
Внешняя |
|
|
среда |
Si |
|
|
|
Устройство |
Объект |
|
управления |
управления |
|
Рис. 4.37. Реализация принципов ситуационного управления
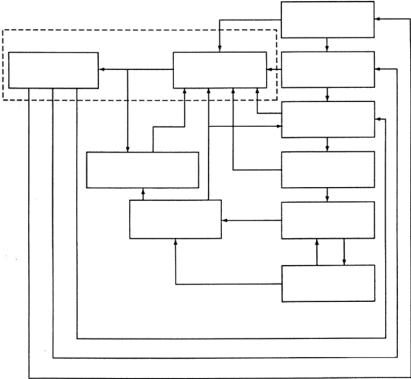
Важно отметить, что главная архитектурная особенность, которая отличает интеллектуальную систему управления (рис. 4.38) от построенной по «традиционной» схеме, связана с подключением механизмов хранения и обработки знаний для реализации способностей по выполнению требуемых функций в неполнозаданных (или неопределенных) условиях при случайном характере внешних возмущений. К возмущениям подобного рода могут относиться непредусмотренное изменение целей, эксплуатационных характеристик системы и объекта управления, параметров внешней среды и т. д. Кроме того, состав системы при необходимости дополняется средствами самообучения, обеспечивающими обобщение накапливаемого опыта, и на этой основе – пополнение знаний.
97
|
|
|
Цель |
|
|
|
управления |
|
Классификация |
|
|
Механизм |
Знания |
Программа |
|
логического |
достижения |
||
вывода |
|
цели |
|
|
|
|
Алгоритм |
|
|
|
управления |
|
|
|
|
|
Механизм обобщения |
|
Исполнительные |
|
накопленного опыта |
|
|
|
|
механизмы |
|
|
и пополнения знаний |
|
|
|
|
|
|
|
Измерительно- |
Объект |
|
|
информацион- |
||
|
управления |
||
|
ные средства |
||
|
|
||
|
Контролируемые |
Неконтролируемые |
|
|
возмущения |
возмущения |
|
Внешняя среда
Параметрическая и структурная настройка алгоритма управления
Коррекция программы достижения цели управления Коррекция цели управления
Рис. 4.38. Обобщенная структура интеллектуальной системы управления
В общем случае объект управления может иметь достаточно сложную конструкцию, включающую в свой состав ряд функциональноподчиненных подсистем. Иерархия их подчинения обусловливает декомпозицию исходных целей и задач управления на рекурсивную последовательность вложенных составляющих. В конечном итоге такое разделение предполагает многоуровневую организацию системы управления, обладающей развитыми интеллектуальными возможностями по анализу и распознаванию обстановки, формированию стратегии целесообразного поведения, планированию последовательности действий, а также синтезу исполнительных законов, удовлетворяющих заданным показателям качества. Структура интеллектуальной системы управления сложным динамическим объектом должна соответствовать иерархическому принципу построения и включать страте-
98
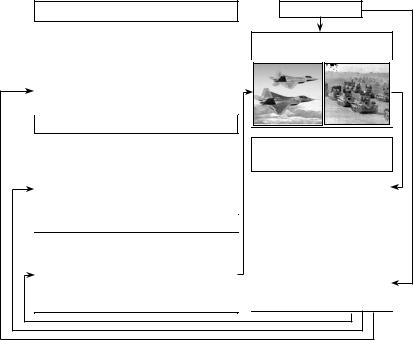
гический, тактический и исполнительный (приводной) уровни, а так- |
||
же комплекс необходимых измерительно-информационных средств |
||
(рис. 4.39). |
|
|
Интеллектуальная система управления |
Внешняя среда |
|
Планирование целесообразного |
Сложный динамический |
|
поведения |
||
– выбор стратегии выполнения задания |
объект управления |
|
– формирование последовательности |
|
|
необходимых действий |
|
|
– оперативная коррекция поведения |
|
|
с учетом изменений среды |
|
|
Тактический уровень |
|
|
Планирование целесообразных |
Измерительно-информа- |
|
действий |
||
ционный комплекс |
||
– с учетом динамики исполнительных |
||
|
||
подсистем |
Замыкание контуров от- |
|
– с учетом состояния и текущих изме- |
дельных уровней управ- |
|
нений внешней среды |
ления |
|
Приводной уровень |
– обеспечение адекватно- |
|
сти преобразуемой инфор- |
||
|
||
Обеспечение инвариантности или ак- |
мации целям функциони- |
|
тивности адаптации системы управле- |
рования системы |
|
ния приводами |
– достоверное отображе- |
|
– к изменениям внешней нагрузки |
ние состояия внешней сре- |
|
– к вариации параметров системы |
ды, системы и объекта |
|
управления приводом |
управления |
|
Рис. 4.39. Иерархическое построение системы интеллектуального |
||
управления сложным динамическим объектом |
||
Корректность замыкания отдельных контуров иерархии управления определяется тем составом функциональных элементов, которые обеспечивают требуемую адекватность информационной поддержки в процессе сбора и обобщения сенсорных данных о текущем состоянии и воздействиях внешнего мира. Таким образом, организация каждого уровня интеллектуального управления предполагает использование уникальной совокупности собственных моделей представления знаний, информационной поддержки, описания контролируемого объекта и т. д.
Следует подчеркнуть, что принцип иерархического построения систем управления сложными динамическими объектами сам по себе
99
далеко не оригинален. Так, например, в целом ряде монографий, опубликованных на рубеже конца 70-х начала 80-х гг., подобная идея неоднократно обсуждалась применительно к проблемам управления многофункциональными роботами вообще и обладающими «элементами искусственного интеллекта» в частности. В последнем случае интеллектуальные функции, которые ограничивались задачами «восприятия, распознавания и моделирования обстановки» с последующим «принятием решения на выполнение той или иной операции», концентрировались исключительно на «высшем» уровне иерархии, венчающем исполнительную, тактическую и стратегическую ступени управления.
С учетом последних достижений в области искусственного интеллекта и смежных научных направлений сферу прикладного применения методов и технологий обработки знаний в решении задач управления можно и нужно подвергнуть существенному пересмотру. Его основная суть заключается в кардинальном изменении точки зрения на роль и место современных интеллектуальных технологий в организации иерархического управления сложными динамическими объектами.
Главным отличием новой концепции иерархического построения систем управления сложными динамическими объектами является использование методов и технологий искусственного интеллекта в качестве основных средств борьбы с неопределенностью внешней среды. Необходимость интеллектуализации каждого из уровней управления обусловлена подверженностью выполняемых ими функций влиянию различных факторов неопределенности. Практическое воплощение этой концепции предполагает избирательное использование тех или иных технологий обработки знаний в зависимости от специфики решаемых задач, особенностей управляемого объекта, его функционального назначения, условий эксплуатации и т. д.
Далее рассмотрим специфические вопросы управления мобильными роботами. Напомним, что в разделе 4.1.2 была описана система управления приводом транспортного мини-робота. В данном же разделе рассматривается общая система управления движением робота по неизвестной местности.
Основное отличие системы управления передвижением роботов от управления манипуляторами заключается в неизмеримо большей рабочей зоне и ее неопределенности [3].
Рассмотрим такие особенности применительно к мобильным роботам, передвигающимся по произвольной местности. В данном слу-
100