Материал: mekhatronika_UrGUPS
задания на стандартном, легкосъемном носителе информации. Лазерный модуль излучает структурированную линию в поле зрения камеры и позволяет выделять препятствия и оценивать дальность до них, места для осуществления маневров, текущую ориентацию относительно предметов и т. д.
Для управления роботом было разработано программное обеспечение, как для бортовых систем, так и для удаленного терминала, позволяющее функционировать в трех основных режимах:
–автоматическом. При этом оператор загружает задание и запускает робота, после выполнения задания робот возвращается и оператором осуществляется съем и анализ полученных данных (телеметрии, построенной карты, данных о радиолокационной обстановке и т. д.);
–ручном. В этом режиме управление роботом полностью осуществляется оператором, который наблюдает за всем происходящим непосредственно на удаленном терминале;
–полуавтоматическом (режим целеуказаний). Оператор в зоне видимости робота указывает точку, к которой робот движется с обходом препятствий. После выхода в точку робот ждет нового задания.
|
|
Таблица 4.3 |
Технические характеристики макетного образца |
||
автономного мобильного робота |
|
|
|
|
|
Максимальная скорость движения |
|
20 см/с |
Время непрерывной работы |
|
1 час |
Время предстартовой подготовки |
|
10 мин |
Точность позиционирования (построение карты) |
|
10 см |
Видео |
|
640×480@25fps |
Фото |
|
1600×1200@5fps |
Канал связи |
|
802,11b (802,11g) |
Максимальный наклон к плоскости горизонта |
|
30° |
Высота преодолеваемого препятствия (не менее) |
|
20 мм |
Габариты |
|
|
Длина |
|
146,4 мм |
Ширина |
|
74 мм |
Высота |
|
62,1 мм |
масса |
|
0,8 кг |
106

4.1.7. Дистанционное управление мобильными мехатронными системами
Несмотря на очевидные успехи в создании автономных мобильных мехатронных (робототехнических) систем, по всей видимости, в ближайшее время не будут разработаны автономные мобильные системы полностью независимые от человека. Во всяком случае, сохранится управление со стороны человека-оператора на уровне постановки цели. При этом необходимость постоянной кабельной или радиосвязи существенно ограничивает область применения мобильной системы, даже при оснащении ее системой технического зрения, т. к. при этом не исчезает необходимость удаленной системы управления.
ССТЗ
Удаленная
система
управления
Управление
мобильным
РТК
Видеоизображение
ССТЗ Управление
изображение Видео
Подвижный
целевой
объект
Мобильный робот
Рис. 4.42. Общая структура мобильного РТК
В качестве примера приведем общую структуру мобильного робототехнического комплекса (РТК), который включает в себя:
–мобильный робот Pioneer 3-DX;
–следящую систему технического зрения (ССТЗ);
–портативный персональный компьютер для удаленного контроля и управления РТК;
–подвижный целевой объект [21] (рис. 4.42).
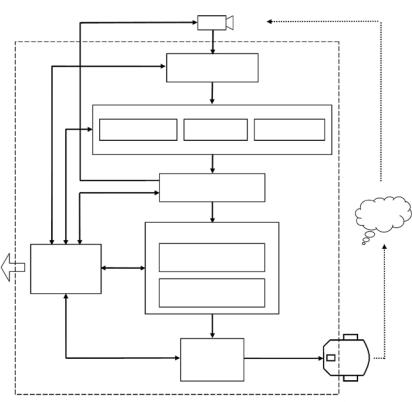
Разработана обобщенная структура построения системы управления робототехническими устройствами на основе следящей системы технического зрения и нечеткой логики (рис. 4.43).
107
|
Система управления верхнего уровня |
|
|
Интеллектуальный уровень |
|
База знаний |
Нечеткий |
|
регулятор |
||
|
Исполнительный
уровень
Регулятор
Объект
управления
Функциональное |
Возмущающие |
|
движение |
воздействия |
|
Внешняя среда/ |
ССТЗ |
|
целевой объект |
||
Рис. 4.43. Обобщенная структура системы управления робототехническими системами на основе метода нечеткой логики и ССТЗ
В начальный момент действия робототехнической системы оператор (либо система управления верхнего уровня) определяют целевой объект слежения и последовательность выполнения элементарных операций для каждого объекта.
Нечеткий регулятор в соответствии с заданной операцией и соответствующим набором продукционных правил из базы знаний выполняет необходимые действия.
При разработке алгоритмического обеспечения системы применен метод локального слежения, позволяющий реализовать обработку цифровых изображений при осуществлении слежения за движущимися объектами в режиме реального времени.
Основная идея предлагаемого метода заключается в том, что определение положения подвижного целевого объекта в области кадра изображения осуществляется путем отслеживания перемещения ха-
108
рактерных признаков объекта в пределах некоторой локальной области, содержащей эти признаки.
Структурная схема и основные элементы следящей системы технического зрения (ССТЗ) показаны на рис. 4.44 и 4.45.
|
видеопоток |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
Управление вращением горизонтальной оси |
||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
Управление вращением вертикальной оси |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Фильтры |
|
|
|
Расчет прираще- |
|
|
Управление вра- |
||||||
обработки |
Координаты |
Приращение |
|||||||||||
ния углов поворота |
щением серво- |
||||||||||||
видеоизоб- |
|||||||||||||
положения |
|
сервоприводов |
углов пово- |
приводов |
|||||||||
ражения |
объекта в сис- |
|
рота серво- |
||||||||||
|
|
теме коорди- |
|
|
|
приводов |
|
|
|
||||
|
|
нат кадра |
|
|
|
|
|
|
|
|
|||
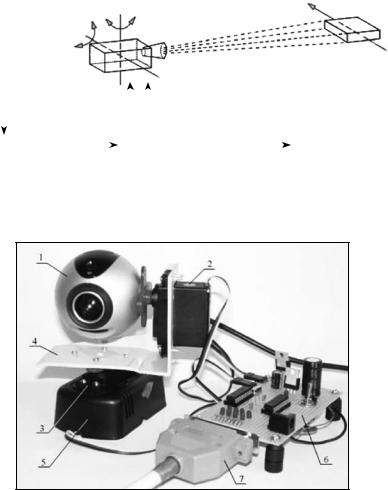
Рис. 4.44. Структурная схема ССТЗ
Рис. 4.45. Основные элементы ССТЗ:
1 – видеокамера, 2 – привод вращения камеры вокруг горизонтальной оси, 3 – индикаторы, 4 – монтажная площадка, 5 – привод вращения камеры вокруг вертикальной оси, 6 – контроллер, 7 – контактор
109
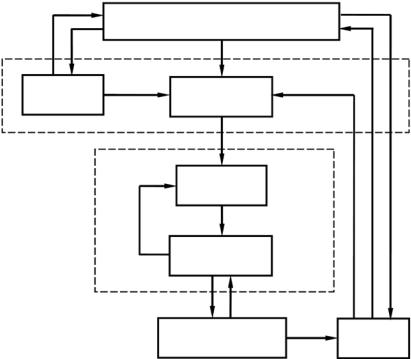
Управляющая программа, основной задачей которой является получение и обработка видеоизображения, управление серводвигателями видеокамеры, осуществление нечетко логического вывода и управление движением мобильного РТК, состоит из двух частей: серверной и клиентской. Серверная часть расположена на базе мобильного робота, клиентская – на портативном персональном компьютере. Связь между ними реализована по схеме «клиент – сервер».
Структурные схемы сервера и клиента управляющей программы приведены на рис. 4.46, а и 4.46, б.
Видеокамера
СЕРВЕР
Захват кадра видеоизображения
Обработка изображения GrayScaleMass RGBMass LocalMatching
|
Расчет углов поворота |
|
видеокамеры |
|
Объект |
|
слежения |
|
Нечеткий логический вывод |
Беспроводное |
Нечеткий контроллер |
UDP соеди- |
угловой скорости |
нение с кли- |
|
ентом |
Нечеткий контроллер |
|
линейной скорости |
|
Управление |
|
движением |
|
РТК |
|
Мобильный |
|
робот |
Рис. 4.46, а. Структурная схема сервера
110