Материал: mekhatronika_UrGUPS
|
|
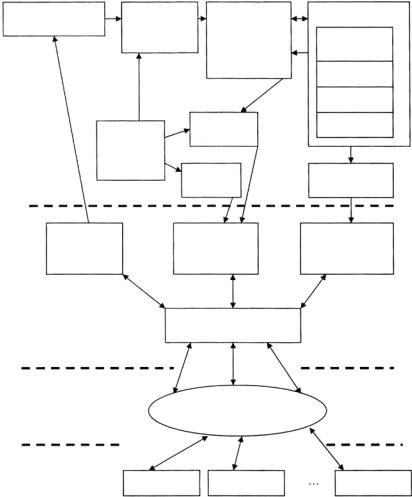
КЛИЕНТ |
|
Ручное управление |
|
|
ССТЗ |
|
|
Ручное управление |
|
Визуальный |
мобильным РТК |
|
|
|
|
интерфейс |
|
Беспроводное |
оператора |
Выбор целевого |
UDP соединение |
|
с сервером |
|
|
объекта |
|
|
|
|
|
Переключение |
|
|
режимов работы |
|
|
мобильного РТК |
|
Рис. 4.46, б. Структурная схема клиента
Использование Интернет-технологий в мехатронике и робототехнике открывает новые перспективы в развитии распределенных систем управления и мониторинга. Дистанционное управление мехатронными объектами с использованием Интернета является наиболее перспективным, но вместе с тем сложным для практической реализации [1].
Обобщенная схема системы управления мобильным роботом по глобальной сети представлена на рис. 4.47 [1].
По этой схеме можно организовать эффективное управление мобильными роботами в различных условиях внешней среды с использованием коммуникационного ресурса Интернета и удобным пользовательским интерфейсом.
Рассмотрим более подробно две основные части системы – мобильный робот с бортовой системой управления и web-интерфейс.
Преобразователь информации выполняет функцию преобразования унифицированных команд верхнего уровня управления, поступающих от человекомашинного интерфейса системы, в команды для тактического уровня управления.
111
Преобразователь |
|
Бортовая |
|
Устройство |
Внешняя среда |
информации |
|
система |
|
|
|
|
|
управления |
согласования |
Мобильный |
|
|
|
и ввода-вывода |
|||
|
|
|
|
робот |
|
|
|
|
|
сигналов |
|
|
|
|
|
|
|
|
|
|
|
|
Приводы |
|
|
|
|
|
Сенсоры |
|
|
|
|
Модель |
ПЗС-камера |
Мобильный |
Информаци- |
|
робота |
|
|
онная сис- |
|
|
|
||
робот |
|
тема |
|
Модель |
План захвата |
|
|
|
|
||
|
|
|
|
среды |
изображения |
Интерфейс |
|
Отображение |
Визуализация |
||
управления |
|
|
параметров |
изображения |
|
движением |
|
|
системы |
с камеры |
|
WEB- |
Проверка прав доступа |
|
интерфейс |
||
|
Интернет |
Глобальная сеть |
Человек-оператор |
Оператор 1 |
Оператор 2 |
Оператор N |
Рис. 4.47. Обобщенная схема системы дистанционного управления мобильным роботом по сети Интернет
Информационная система навигации мобильного робота выполняет функцию сбора и обработки данных с датчиков пройденного пути, скорости и ускорения, датчиков наличия препятствий и пр. Обработка данных позволяет выдавать информацию о текущем положении и скорости движения робота, наличии препятствий, расстоянии до них и т. п. Значения этих навигационных переменных использу-
112
ются системой управления тактического уровня, а также позволяют сформировать модель робота и окружающей среды для отображения параметров системы на мониторе оператора.
Бортовая система управления уровня должна обладать высокой степенью интеллектуальности на тактическом уровне. В ее задачи входит:
–формирование команд для исполнительных приводов робота;
–корректировка команд с учетом текущих параметров Интер- нет-соединения и прогноза возникновения критических ситуаций;
–автоматическая остановка движения и переход в режим ожидания при потере управляющих воздействий от оператора.
Устройства согласования и ввода-вывода сигналов обеспечивают работу системы на исполнительном уровне управления. Они осуществляют усиление сигналов, сбор данных, выдачу управляющих воздействий на приводы робота. Плата захвата изображений необходима для ввода изображения с ПЗС-камеры в бортовой компьютер, в случае использования нескольких камер осуществляется также синхронизация их работы.
Основными функциональными блоками web-интерфейса являются интерфейсы управления движением, отображения параметров системы и передачи видеоизображения.
Интерфейс управления движением предоставляет оператору возможность нажатия кнопки на экране монитора, как разрешение на начало движения, остановку, поворот, изменение скорости. При дистанционном управлении через Интернет возникает техническое противоречие. С одной стороны, оператор для правильного и своевременного принятия решения должен иметь максимально полную информацию о состоянии робота и окружающей его среды; с другой – при увеличении объема передаваемой оператору информации увеличиваются временные задержки, оператор может не успеть среагировать на изменение внешних условий или состояния робота.
Предлагаемая методика взаимодействия оператора с роботом посредством сети Интернет предусматривает:
1)унификацию команд верхнего уровня управления (команд оператора);
2)максимально возможное упрощение ввода управляющих воздействий оператором;
3)реализацию управления в виде команд, задающих относительное или абсолютное приращение к текущему значению параметра;
113
4) отображение параметров системы на мониторе оператора с обязательным подтверждением принятия команд к исполнению и наличием индикаторов опасных ситуаций.
Для уменьшения загрузки канала связи при взаимодействии оператора с роботом предлагается уменьшить объем передаваемых управляющих воздействий за счет использования CGI-интерфейса. Алгоритм работы системы с использованием интерфейса CGI включает следующие основные этапы:
1.Клиент устанавливает соединение с web-сервером через стандартный браузер (например, Microsoft Internet Explorer).
2.Браузер клиента передает серверу HTTP-запрос.
3.Web-сервер анализирует запрос по расширению и выясняет, что это запрос не статической страницы, а запрос к CGI-скрипту.
4.При обнаружении указанного в запросе CGI-приложения и наличии прав на запуск web-сервер запускает приложение.
5.CGI-скрипт выполняет необходимые действия и в результате взаимодействия с приложением формирует ответные данные, выводит их в стандартный поток ввода-вывода. Web-сервер передает эти данные клиенту. Причем CGI-скрипт может передавать не только HTM-данные, но и бинарные данные, таким образом полностью формируется HTTP-ответ.
6.Web-сервер разрывает соединение, завершая тем самым обмен. На основе анализа эффективности различных языков программи-
рования при разработке CGI-приложений в качестве основной среды разработки был выбран язык графического программирования Lab-
VIEWTM (Laboratory Virtual Instrument Engineering Workbench – рабочее место проектирования лабораторных виртуальных приборов).
LabVIEW – это мощный, полнофункциональный язык программирования, работающий на платформах: PC под управлением Microsoft Windows, компьютеров Apple Macintosh, рабочих станций Sun SPARCstations, Concurrent PowerMax и HP-UX. LabVIEW отступает от последовательной природы традиционных языков программирования и отличается графической программной средой и инструментарием, необходимым для сбора данных, анализа и представления результатов. С помощью базиса LabVIEW – графического языка программирования, именуемого «G», можно создавать программы в виде блокдиаграмм, которые позволяют более адекватно воспринимать «текст» программы, облегчают ее отладку, модернизацию, поиск и корректировку ошибок. После написания программы в виде блок-диаграммы LabVIEW преобразует ее в машинный код.
114
LabVIEW объединяет сбор, анализ и представление информации в один комплекс («сквозная» технология программирования). Для получения данных и управления приборами LabVIEW поддерживает протоколы RS-232 / 422, IEEE 488 (GRIB) и VXI, включая функции Virtual Instrument Software Architecture (VISA), а также встраиваемые платы сбора данных. В состав пакета входит инструментальная библиотека с драйверами для сотен приборов, что значительно упрощает приложения управления приборами. Обширная библиотека для анализа данных содержит функции: генерации сигналов, их обработки, фильтрации, статистической оценки, линейной алгебры и операции с массивами. Пакет LabView является графическим по своей природе и обеспечивает такие средства визуализации, как создание таблиц, приборных индикаторов, двухмерных графиков и трехмерных изображений.
В числе других достоинств LabVIEW можно отметить возможность встраивания в блок диаграммы подпрограмм пользователя, написанных на традиционных «текстовых» языках программирования (Си, С++, Pascal, Visual Basic), компилированных в виде динамически подключаемых библиотек, а также скриптов, написанных в широко распространенной среде MatLab. Это позволяет обеспечить преемственность программного обеспечения и исключает необходимость повторной разработки ранее созданных подпрограмм.
Решающими аргументами в пользу LabVIEW при выборе средства разработки были следующие преимущества:
1.Возможность разработки CGI-приложений, что позволяет реализовать концепцию интеграции программного обеспечения webсервера с управляющей роботом программой.
2.Поддержка операционной системы жесткого реального времени LabVIEW RT, что позволяет осуществлять разработку кода, а также мониторинг и отладку программы в среде LabVIEW под управлением операционной системы Microsoft Windows, а затем загрузить созданный код на компьютер (бортовой контроллер), работающий под управлением операционной системы жесткого реального времени.
3.Наличие в дополнительной библиотеке «Internet Developers for G Yoolkit» встроенного G web-сервера – базисного компонента, позволяющего на его основе разрабатывать Интернет-приложения.
Схема управления мобильным роботом «ИРИС-1» по сети Интернет, предназначенным для инспекции и ремонта подземных трубопроводов различного назначения, приведена на рис. 4.48 [1].
115