Материал: mekhatronika_UrGUPS
кул. Для такого рода устройств не могут быть применены методы и механизмы реализации сборки, разработанные для систем обычных размеров.
Основным техническим устройством, на базе которого строится микросборочная станция (МСС), является пьезоэлектрический микроробот класса «МикРоб». В настоящее время для создания МСС предлагается использование наиболее совершенного варианта микророботов данного типа – пьезоэлектрических микророботов «МикРоб III».
Различные типы мобильных пьезоэлектрических микросборочных роботов семейства «МикРоб» (рис. 4.20, 4.21) были разработаны в лаборатории микроробототехники кафедры технической кибернетики Уфимского государственного авиационного технического университета.
Рис. 4.20 Пьезоэлектрические микророботы: «МикРоб I» (справа) и «МикРоб II» (слева)
Каждый робот оснащен узлом микроманипуляций (два у робота «МикРоб I», и один у роботов «МикРоб II» «МикРоб III»), установленным на подвижной платформе с тремя пьезоэлектрическими приводами. Микроманипулятор робота имеет сферическую основу, приводимую в движение также тремя пьезоэлектрическими приводами. Микроманипулятор может оснащаться различным микроинструментом или пьезоэлектрическим микросхватом (рис. 4.21, а).
Губки микросхвата приводятся в движение с помощью двух параллельно расположенных биоморфных пьезоприводов и вычажного механизма, обеспечивая захват микрообъектов размером до 2 мм. Разработанная конструкция робота обеспечивает при выполнении манипуляций точность позиционирования микрообъектов не ниже 10 нм.
81
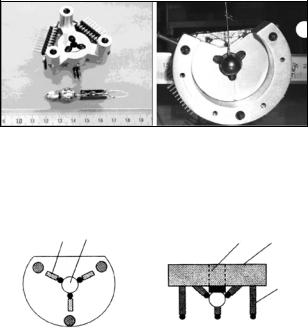
Рис. 4.21. Пьезоэлектрические микророботы:
а – «МикРоб II» (вид сверху); б – «МикРоб III» (вид спереди)
Рассмотрим более подробно конструкцию мобильного пьезоэлектрического микроробота (рис. 4.22).
5 |
3 |
4 |
1 |
2
а |
б |
Рис. 4.22. Мобильный пьезоэлектрический микроробот: а – вид снизу; б – вид сбоку
Микроробот содержит подвижную платформу 1. Для реализации его перемещения по плоскости используются три пьезоэлектрических преобразователя 2, расположенных в вершинах равностороннего треугольника. Пьезоэлектрические преобразователи 2 представляют собой пьезокерамический трубчатый элемент с внутренним и четырьмя внешними симметрично расположенными электродами. К свободному концу пьезопривода приклеен рубиновый шарик для обеспечения постоянной величины площади контакта привода с поверхностью.
Под действием электрического напряжения, приложенного между внутренним и одним из внешних электродов, пьезокерамический трубчатый элемент деформируется. При подаче на сегменты внешних электродов соответствующих напряжений пьезопривод 2 можно удлинить, укоротить или согнуть в любом из направлений, что позволяет реализовывать требуемые движения и повороты подвижной платформы 1 микроробота.
82
Для перемещения платформы используется шагоподобное движение, основанное на скоростных свойствах пьезоэлементов и инерции платформы, которые обеспечивают возможность направленного движения пьезоэлектрического преобразователя при выполнении одного шага, прежде чем под действием силы тяжести платформа потеряет свое устойчивое состояние. Для выполнения одного шага используется определенная последовательность управляющих пилообразных напряжений. Величина шага задается амплитудой подаваемого напряжения, скорость движения – частотой пилообразного напряжения.
Для выполнения манипуляций с микрообъектами микроробот снабжен системой микроманипулирования, которая представляет собой шаровую основу 3 из магнитопроводящего материала с приспособлением для крепления микросхвата. На подвижной платформе 1 (рис. 4.22) установлена магнитная система, состоящая из постоянного магнита 4, компенсирующего силу тяжести и обеспечивающего постоянную силу прижатия шаровой основы 3 манипулятора к пьезоэлектрическим преобразователям 5. Движение манипулятора генерируется с помощью трех пьезоэлектрических преобразователей 5 (идентичных преобразователям 2), оси которых пересекаются в центре шаровой основы под углом 90° друг к другу, то есть образуют декартову систему координат с началом отсчета, расположенным в центре шаровой основы. Прикладывая напряжение на соответствующие противолежащие сегменты внешних электродов двух пьезоприводов 5, можно добиться поворота шаровой основы относительно оси третьего пьезопривода.
В связи с тем что величина одного шага пьезоэлектрического преобразователя меньше диаметра шаровой основы манипулятора более чем на шесть порядков, то управление перемещением микросхвата осуществляется аналогично управлению пьезоприводами 2 подвижной платформы. При этом используются три типа движения манипулятора: во-первых, подъем и опускание манипулятора; во-вторых, движение манипулятора влево и вправо и, в-третьих, вращение манипулятора вокруг собственной оси. Последнее движение может быть выполнено с помощью поворота шаровой основы вокруг одного из пьезоприводов. Первые два типа требуют более сложного составного движения, которое генерируется с помощью чередующихся последовательностей простейших движений – вращения вокруг соответствующих пьезоприводов.
83
4.1.4. Кинематические структуры многокоординатных машин
Типичными представителями многокоординатных (многозвенных) механизмов являются манипуляторы – механизмы, обладающие несколькими степенями подвижности (свободы), которые предназначены для перемещения и ориентации объектов в рабочем пространстве. Манипулятор является базовым элементом робота.
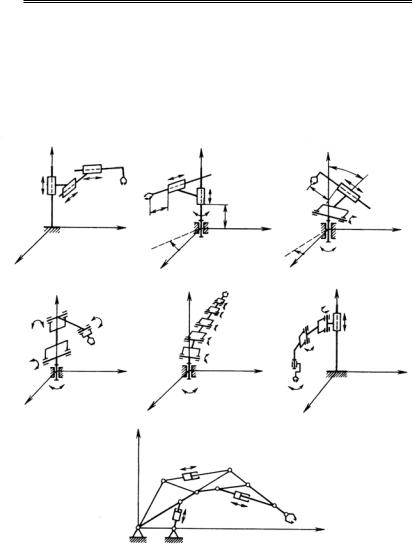
Типовые кинематические схемы манипуляторов приведены на рис. 4.23 [5].
а |
Z |
б |
Z |
в |
Z |
|
|
|
|
|
R
L
h
θ
|
|
0 |
Y |
|
φ |
0 |
Y φ |
0 |
Y |
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
X |
|
|
X |
|
г |
Z |
|
|
д |
Z |
|
е |
Z |
|
|
|
|
|
|
|
||||
|
φ3 |
|
φ4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ2 |
|
|
|
|
|
|
|
|
|
|
0 |
Y |
|
|
0 |
Y |
0 |
Y |
|
|
φ1 |
|
|
|
|
|
||
|
X |
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
X |
|
||
|
|
|
|
|
|
|
|
ж Z
0
X
Рис. 4.23. Типовые кинематические схемы манипуляторов:
а – прямоугольная; б – цилиндрическая; в – сферическая; г – антропоморфная; д – с избыточностью; е – SCARA; ж – схема гидравлического манипулятора с ветвлением кинематической сети
84
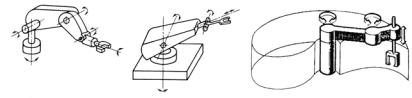
Конструктивные компоновки манипуляторов PUMA-560, UNIMATE и SCARA показаны на рис. 4.24.
|
03 |
|
02 |
03 |
04 |
02 |
04 |
|
|
|
|
|
05 |
|
|
|
|
|
01 |
|
|
|
|
|
а |
б |
01 |
|
в |
|
|
|
Рис. 4.24. Конструкции промышленных манипуляторов:
а – PUMA-560; б – UNIMATE; в – SCARA
Селективная податливая рука сборочного робота (SCARA – selective compliance assembly robot arm) разработана в университете Яманаси (Япония). Звенья манипулятора взаимно поворачиваются в одной плоскости, а рабочий орган совершает поступательные движения вверх и вниз.
Кинематика SCARA подобна схемам в угловой системе координат, однако вращающиеся соединения звеньев расположены в горизонтальной, а не в вертикальной плоскости с использованием вертикальной оси для подъема захватного устройства. В такой конструкции сочетаются свойства схем в угловой и цилиндрической системах координат. За счет жесткости конструкции в вертикальном направлении манипуляторы SCARA могут нести повышенные нагрузки на рабочем органе. Высокая точность позиционирования рабочего органа и большая рабочая зона позволяют особенно эффективно применять компоновку SCARA при сборке [18].
Приведенные на рис. 4.23 и 4.24 манипуляторы обеспечивают промышленным роботам высокую степень манипуляции, но имеют и ряд недостатков:
–низкий показатель грузоподъемность / масса манипулятора;
–относительно низкая точность позиционирования в связи с суммированием погрешностей по всей цепи звеньев манипулятора;
–относительно низкая жесткость манипуляторов.
Один из новых и эффективных методов преодоления перечисленных недостатков – создание машин с параллельной кинематикой (МПК). В основе их конструктивной схемы лежит обычно подвижная «платформа Стюарта», соединенная с основанием несколькими
85