Материал: mekhatronika_UrGUPS
Окончание табл. 4.1
Тип микродвигателя |
SPx39003 |
SPx39004 |
Мертвый ход при нагрузке 10 м Нм, ° |
4 |
– |
Мертвый ход при нагрузке 2 м Нм, ° |
– |
3 |
Скорость вращения двигателя, об / мин |
15 000 |
15 000 |
Габариты двигателя |
диаметр |
3 мм |
|
длина 6,87 мм |
|
Габариты редуктора |
диаметр 3,4 мм |
|
|
длина 5,37 мм |
|
Вразделе 2.2.3 описаны микродвигатель, сконструированный
вуниверситете Висконсин – Мэдисон (США), и пьезоуправляемый микродвигатель для электронной микроскопии, микробиологии, микросборки, созданный на фирме Klocke Nanotechnik (Германия), ход которого составляет несколько нанометров.
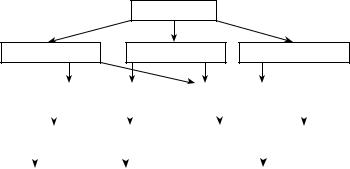
Микророботы. Классификация микророботов по области применения, способам перемещения и т. д. приведена на рис. 4.17.
Микророботы
Технологические Инспекционные Исследовательские
|
|
|
Стационарные |
|
|
|
|
|
Мобильные |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Летающие |
|
Колесные |
|
|
|
Гусеничные |
|
|
Шагающие |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Гибридные |
|
Плавающие |
|
|
|
Иные принципы перемещения |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.17. Классификация микророботов
Вышеприведенная классификация не претендует на полноту описания существующих конструкций микророботов, так как некоторые прототипы трудно бывает отнести к какому-либо классу. Это связано,
впервую очередь, с условиями функционирования микросистем.
Ктехнологическим микророботам относятся конструкции, предназначенные для автоматизации технологических процессов производства микромеханических систем, в основном это сборочные
76
процессы и процессы механический обработки отдельных компонентов. Чаще всего стационарные роботы представляют собой копирующие манипуляторы, но работающие в диапазоне микроперемещений и с усилиями, измеряемыми несколькими мН и меньше. Мобильные технологические роботы оснащаются очувствленными микросхватами и выполняют задачи транспортировки микрообъектов или микроузлов как в зону сборки, так и готовых изделий на выгрузку. Мобильность реализуется использованием колесного, гусеничного или шагающего принципов перемещения.
Инспекционные стационарные микророботы предназначены для проведения операций контроля размеров или других параметров, тестирования функциональных возможностей микросистем, автоматизации операций при работе с электронным микроскопом. Мобильные роботы этого класса чаще всего называют роботами-разведчиками. Основная их задача – инспекция труднодоступных мест, неразрушающий контроль, сбор данных и т. д. Миниатюризация позволяет создавать и использовать при изготовлении таких микророботов СТЗ, приемо-передатчики радиодиапазона, блоки питания и другие компоненты, конструктивно оформленные в виде отдельных микросхем, размеры которых не превышают 1 см2. Таким образом, возможно создание инспекционного микроробота, способного автономно перемещаться в течение нескольких десятков часов, передавая при этом на удалении до нескольких сот метров видеоинформацию, данные с регистрирующих приборов и т. д.
К исследовательским роботам следует отнести те микророботы, которые предназначены для отработки новых элементов конструкции, проверки новых узлов связи, управления и т. д. На базе таких роботов часто проводят эксперименты по проверке работоспособности систем управления и планирования, ставят эксперименты по групповому управлению, изучают механизмы взаимодействия с окружающей средой.
В настоящее время проводятся работы по созданию системы микроманипулирования, которая может использоваться для сборки гибридных микросистем. Система должна быть установлена внутри сканирующего электронного микроскопа, который лучше всего подходит для высокоточного позиционирования в силу большой величины сканируемого пространства и значительной глубины резкости получаемого изображения. Другое преимущество электронного микроскопа – отсутствие микроскопических частиц в рабочей зоне (создается вакуум). Рабочей поверхностью в этой системе (рис. 4.18) является
77
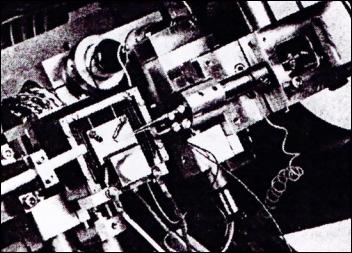
координатный стол электронного микроскопа, отдельные элементы которого могут нагреваться до 1000º С из-за воздействия пучка электронов.
Рис. 4.18. Микроманипулятор для сканирующего электронного микроскопа
Координатный стол микроскопа может перемещаться с точностью до 1 мкм вдоль осей X и Y. В микроскопе используется закрытое вакуумное пространство размером 200×150×150 мм3. В качестве рабочего органа используется пьезоэлектрический микропинцет, предназначенный для точного позиционирования микрообъектов. Расстояние между губками пинцета в открытом состоянии 200 мкм. Пинцет может развивать усилия до 0,3 Н. Микропинцет прикреплен к модулю позиционирования, который имеет четыре степени свободы и отвечает за грубое позиционирование. Он оснащен двигателями постоянного тока. Для следующего прототипа этой системы разрабатывается модуль позиционирования, который будет иметь шесть степеней свободы, а точность позиционирования будет лежать в субмикрометровом диапазоне. Это даст системе возможность собирать трехмерные микросистемы. Дополнительный манипулятор может использоваться для задач измерения или как вспомогательный инструмент для обеспечения процесса сборки. Данная система использует пьезоэлектрик в качестве приводов схвата.
78
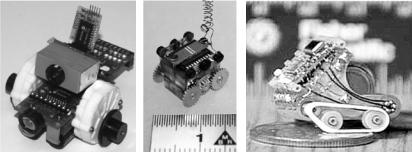
Мобильные микророботы. Ученые лаборатории SNL (Sandia National Laboratories) – подразделение Минэнергетики США – сконструировали достаточно маленькие, реально работающие автономные роботы. Их размер не превышает одного кубического сантиметра. Скорость перемещения робота – полметра в минуту, энергии батарей (три батарейки для часов) хватает на 15 минут движения.
Вычислительная мощность процессора такого робота аналогична мощности первых ПК (тактовая частота до 1 МГц и ПЗУ порядка 8 Кб). Пока действующая модель робота снабжена только датчиками температуры. В дальнейшем планируется оснастить ее микрофоном, радиопередатчиком, устройствами дистанционного управления
иинфракрасными датчиками движения. Установить же видеокамеру
иполучать изображения в масштабе реального времени из-за технической сложности пока не удается, хотя отдельные кадры от микрофотокамеры принимать можно.
а |
б |
в |
Рис. 4.19. Микророботы:
а – Swibot; б – µR; в – Sandia National Laboratories
Первые модели роботов создавались на колесном ходу (рис. 4.19, а и б), но теперь используются гусеницы (рис. 4.19, в). Это позволяет роботам более устойчиво передвигаться по неровной местности. Основная проблема при создании таких устройств – это источники питания. По заявлению разработчиков размеры робота определялись только размером батареек и сроком их жизни. И если им бы удалось найти другие малогабаритные источники питания, то эффективность данного класса микророботов значительно повысилась бы.
79
Микротехнологические модули и комплексы. Современные микротехнологические модули и комплексы должны отвечать следующим требованиям:
–допустимая погрешность формы при обработке микроизделий – 0,01…0,1 мкм;
–шероховатость обрабатываемой поверхности Ra = 0,002…0,01 мкм;
–дискретность перемещения при выполнении микросборочных операций до 5 нм;
–исключение тепловых и вибрационных воздействий на микротехнологические модули.
Примером могут служить электроэрозионные станки фирмы Sodick, которые применяются при обработке деталей в микрооптике и микроэлектроние. Этим требованиям также удовлетворяют стационарные и мобильные робототехнологические модули и комплексы, участвующие в реализации технологических процессов обработки и сборки микроизделий.
Использование мобильных микророботов в составе микросборочных и микротехнологических станций позволит реализовать многооперационную обработку и сборку, транспортировку объекта, тестирование и контроль конечного продукта, рационально распределить нагрузку между сборочными единицами, повысить эффективность всего комплекса.
При проектировании микророботов необходим конструктивно новый подход к выбору базовых физических эффектов, на основе которых строятся приводы перемещения мобильных роботов. Основное требование к исполнительным механизмам, применяемым в микроробототехнике, – это отсутствие механических передач или преобразователей видов движения. Перемещения, которые должны реализовываться этими приводами, более чем на порядок ниже величины люфта механических передач, поэтому в качестве приводов чаще используются так называемые преобразователи рода энергии, наиболее распространенными из которых являются обращенные электромеханические преобразователи.
Микросистемы находят применение в медицине, биологии, промышленности. Однако при сборке микросистем возникают проблемы, связанные с размерами микрообъектов. В настоящее время недостаточно развиты технические устройства, позволяющие осуществлять с высокой точностью манипуляции над микрообъектами, размеры которых могут быть соизмеримы с размерами моле-
80