Материал: Механика (статика). учебное пособие. Рябцев В.А
сящих от приложенных сил. Движение, например, подводной лодки или самолета, несмотря на сопротивление водной или воздушной среды, может происходить в любом направлении в зависимости от действующих сил. Вода для подводной лодки и воздух для летящего самолета являются средами, но не связями.
Пусть санки скользят по льду и ударяются о забор. Санки отскочат от забора, изменят свое движение, следовательно, на санки со стороны забора подействовала сила. Забор для санок в момент столкновения был связью, так как он ограничил свободу перемещения санок. Действие стола на лежащую на нем книгу можно заменить силой, направленной вверх и равной по модулю силе тяжести книги. Действия связей аналогичны действию сил, так как источниками
сил для данного тела являются другие тела. Но возникает следующий вопрос. Есть силы, не зависящие от связей, - сила тяжести, сила тяги и др. Их можно задать по величине и направлению и изобразить соответствующими векторами. Можно ли также поступать по отношению к действиям связей? В дальнейшем будет очевидным, что при решении задач и теоретических доказательствах выгодно окружать рассматриваемое тело стрелками векторов. Было бы весьма неудобно, если бы пришлось кроме векторов заданных сил рассматривать стены, углы, всякие другие опоры, не заменяя их действия векторами сил. То, что действия связей можно заменить векторами сил, возможно, покажется очевидным, но это утверждение ни отку-
111
да не выводится, его правильность оправдывается опытом, и оно носит название принципа (аксиомы) освобождения от связей: всякое несвободное тело можно, мысленно отбросив связи, рассматривать как свободное, если действия связей заменить силами - реакциями связей. Реакции связей вторичны, они возникают как противодействие другим силам. Если книга снята со стола, то исчезает и реакция стола на книгу. При этом сила тяжести книги остается прежней независимо от того, лежит книга на столе или снята с него. В отличие от таких сил, как сила тяжести, реакция связи не может вызвать движение тела. Например, книга, лежащая на столе, не может вдруг подскочить, начать движение вверх под действием только реакции стола, тогда как, если бы мы внезапно убрали изпод книги стол, то под действием силы тяжести книга начала бы падать. Книга могла бы подскочить, если бы мгновенно исчезла сила тяжести. Из изложенного материала следует необходимость разделять все силы на две категории: реакции связей и заданные силы.
Все силы, кроме реакций связей, называют заданными силами, хотя при решении задач заданные силы необязательно действительно заданы (известны). Термин «заданные силы» имеет глубокий смысл, и его происхождение может быть объяснено только в третьей части теоретической меха-
ники - динамике. Заданные силы чаще всего являются активными, т. е. силами, которые могут вызвать движения свободного тела, например сила тяжести, сила тяги, сила электрического взаимодействия и т. д. Но понятие заданные силы шире понятия активные силы. Например, сила лобового сопротивления воздуха для летящего самолета представляет собой заданную силу, потому что воздух не является для самолета связью. Однако эта сила не является активной силой, так как если не было бы силы тяги двигателя, то не возникло бы и лобовое сопротивление воздуха, и само по себе это сопротивление не может вызвать движение самолета. Учитывая изложенное вы-
112
ше, силы будем подразделять на реакции связей и на активные силы.
Одна из главных задач статики твердого тела - определение реакций связей. В зависимости от возможности априорного определения и способа определения направления реакции связи можно разделить на три группы: 1) направления реакций определяются видами связей и не зависят от других приложенных сил; 2) направления реакций частично определяются связями и зависят, кроме того, от других приложенных сил; 3) направления реакций заранее не известны и зависят от других приложенных сил.
7.3.1. Связи первой группы
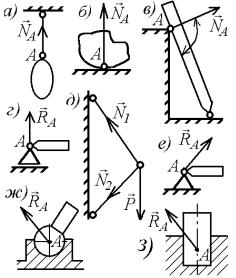
К первой группе относятся гибкие связи (рис. 7.6, а). К гибким связям относят нити, веревки, тросы, цепи и пр. Такая связь может воспринимать только растягивающие ее силы и
называется односторонней. Реакции гибких связей направлены
по этим связям. Так, для груза весом P1 (рис. 7.5, а) связью яв-
ляется веревка АО, и реакция RA (сила натяжения веревки)
направлена вдоль этой веревки. В дальнейшем считается, что блок может только изменять направление силы, действующей вдоль веревки, перекинутой через блок, но не изменяет величину этой силы. Так, блок В изменяет направление силы натя-
|
|
|
жения веревки |
P2 , вызванной грузом и эта сила действует на |
|
|
|
|
рассматриваемый груз P1 с той же по модулю силой P2 , но от |
||
|
|
|
точки О к точке В. Подразумевается, что груз |
P2 взят таким, |
|
|
|
|
чтобы груз P1 находился в равновесии. Веревка OBC не явля-
ется связью для груза P1 , так как она не ограничивает его пе-
ремещение. Однако, если вместо груза P2 прикрепить веревку
OBC в точке С, например, к крюку (рис. 7.5, б), то она станет
связью для груза P1 , так как теперь, какова бы ни была вели-
113
чина груза P1 , он не может удалиться от точки В больше чем на расстояние OB.
Нити являются односторонне удерживающими связями, поскольку могут воспринимать только растягивающие их силы. Если вместо растягивающей силы к нити приложить противоположно направленную силу, нить перестает быть связью.
Идеально гладкой поверхностью, для краткости называемой гладкой поверхностью, (рис. 7.6, б) называют поверхность, на которой не возникают сила трения, препятствующая скольжению другого тела по этой поверхности. Гладких поверхностей не существует. Это только очень важная для практики абстракция. Поверхности считаются гладкими и используются как в тех случаях, когда силы трения настолько малы, что ими можно пренебречь, так и в тех случаях, когда для надежности и безопасности работы конструкции или детали нельзя учитывать влияние трения. Реакция гладкой поверхности направлена по нормали (перпендикуляру) к этой поверхности. Это объясняется отсутствием сил трения.
Свободная (незакрепленная) опора на неподвижную точку или ребро двугранного угла (рис. 7.6, в) воздействует на опирающееся тело реакцией, направленной по нормали (перпендикуляру) к опирающейся поверхности в окрестности опорной точки.
Шарнирно - подвижными опорами (рис. 7.6, г) называют связи, допускающие вращение одного тела относительно другого. Одним из самых распространенных видов шарнирно - подвижных опор являются катковые опоры (катки). Такие опоры препятствует движению тела по нормали к опорной поверхности катков, поэтому реакция считается нормальной (перпендикулярной) к опорной поверхности катков. Такие опоры используются, например, для компенсации температурных изменений длин мостов.
Конструкции шарнирно - подвижных опор могут быть
114
весьма разнообразным.
В отличие от нити стержень является двусторонне удерживающей связью, поскольку может воспринимать и растягивающие и сжимающие его силы. В условиях задач теоретической механике вес стержней часто не указывается. Это означает, что стержни считаются невесомыми.
Согласно второй аксиоме статики невесомый стержень, находясь в равновесии, может действовать на соединяемые им тела только силами, направленными вдоль его оси в противоположные стороны (рис. 7.6, д).
7.3.2. Связи второй группы
К связям второй группы относится неподвижный цилиндрический шарнир (рис. 7.6, е), представляющий собой неподвижную ось - палец шарнира, вставленную с небольшим зазором в цилиндрическое отверстие в рассматриваемом теле. Зазор необходим для исключения заклинивания деталей соединения при изменении диаметров оси и отверстия при изменении температуры, а также для надежной смазки соединения.
Силой трения в осевом направлении, даже если она возникает, обычно пренебрегают и считают, что реакция цилиндрического шарнира лежит в плоскости, перпендикулярной оси шарнира и проходит через эту ось. В зависимости от действующих сил опирающееся тело может прижиматься к пальцу в разных местах, и поэтому направление реакции, находящейся в плоскости, нормальной к оси шарнира, зависит от приложенных к телу сил. Таким образом, конструкция цилиндрического шарнира определяет плоскость, в которой лежит реакция, но направление реакции в этой плоскости заранее неизвестно и зависит от приложенных к телу сил.
Разновидностью неподвижного цилиндрического шарнира является подшипник. В этом случае тело скреплено с подшипником осью или валом, которые вставляются внутрь ци-
115