Материал: Механика (статика). учебное пособие. Рябцев В.А
OD на ось у: Y= OB = OD cos . Следовательно, Y= P cos cos
.
Таким образом, чтобы спроецировать силу на данную ось, можно вначале спроецировать силу на плоскость, содержащую ось, а затем по полученной проекции определить проекцию силы на данную ось.
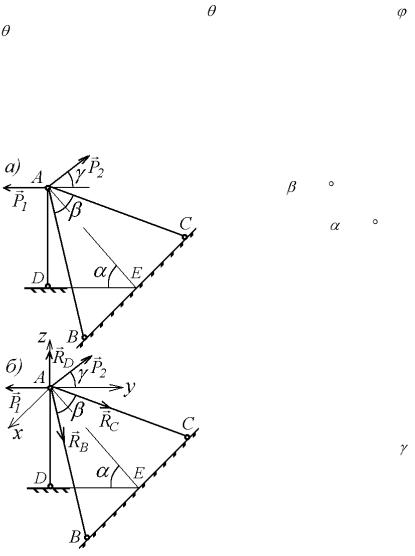
Пример 8.9. Два равных по длине столба AB и ВС образуют угол = 90 и лежат в плоскости, наклоненной к горизонту под углом = 60 , а в точке А поддерживаются вертикальным столбом AD. Весами силами тяжести столбов можно пренебречь и считать соединения в точках А, В, С и D шарнирными. Нижние концы столбов В, С и D расположены в горизонтальной плоскости. В общей вершине А приложены две силы - горизонтальная P1 = 16 кН и сила P2 = 4 кН, наклоненная к горизонту под углом = 30° (рис. 8.18, а). Обе эти силы лежат в вертикальной плоскости, делящей угол  пополам.
пополам.
Определить силы в столбах. Решение. Рассмотрим
равновесие основного шарнира А, для которого связями явля-
ются все три столба. Так как невесомые стержни могут передавать силы только вдоль стержней, то реакции столбов направляем вдоль продольных осей этих столбов. Предположим, что столбы AB и ВС растянуты, а столб AD сжат. Тогда реак-
171

ции |
|
|
и |
|
будут направлены от шарнира А внутрь столбов, |
R |
B |
R |
|||
|
|
|
C |
|
|
а реакция |
RD - к шарниру А. Если для какого-либо столба |
||||
предположение о направлении реакции было ошибочным, то из уравнений равновесия получится отрицательное значение реакции для этого столба.
Выбираем оси координат так, как показано на рис. 8.18, б, т. е. ось Ax параллельна ВС, а оси Ay и Az взяты в плоскости
сил P1 и P2 .
Составим уравнения (8.5):
X=0, RBcos45 - RCcos45 = 0;
Y=0, RBcos45 cos60 - RCcos45 cos60 - P1 + P2cos30 = 0, Z=0; -RBcos45 cos30 - RCcos30 - RD + P2cos60 = 0.
Из первого уравнения следует, что RB = RC; из второго уравнения RB = RC = 35,45 кН; из третьего уравнения RD = 41,4 кН.
8.5.5. Произвольная пространственная система сил Для описания равновесия тела в данном случае можно
использовать шесть уравнений равновесия (8.4). Если направ-
ление искомой реакции RA в некоторой точке А заранее неиз-
вестно, то заменяем ее тремя составляющими X A , YA , Z A по
трем выбранным осям координат. Ненулевые проекции этих составляющих равны соответствующим проекциям ХА, YA, ZA
искомой реакции RA . Направление и модуль искомой реакции
определяют (8.12) и (8.13. При вычислении момента силы относительно оси в тех случаях, когда определение плеча затруднено, рекомендуется разложить силу на две или три составляющих и применить теорему Вариньона (§ 7.6).
Пример 6.10. Однородная плита весом F= 10кН удерживается в горизонтальном положении шарниром А, цилиндри-
172
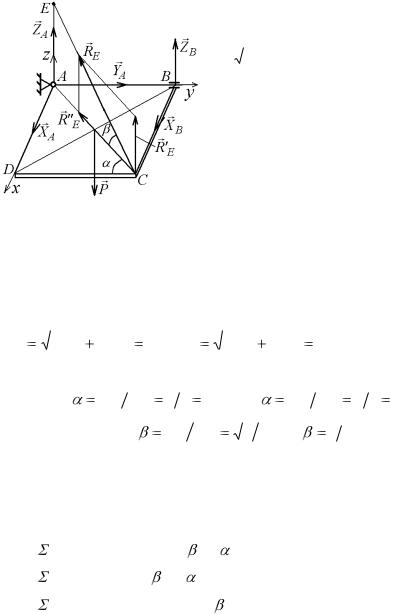
ческим подшипником В и тросом ЕС, привязанным в точке E к крюку, вбитому в стену на одной вертикали AE (рис. 6.19).
Дано: AD = 3 м, AB = 4 м. AE
|
|
|
|
|
|
|
|
|
|
|
|
= 5 3 м. Определить реакции |
|||||
|
|
|
связей. |
|
|
|||
|
|
|
|
Решение. Пусть плита на- |
||||
|
|
|
ходится в равновесии. Приме- |
|||||
|
|
|
ним принцип освобождения от |
|||||
|
|
|
связей. Так как направление |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
реакции RA |
неизвестно, то за- |
||||
|
|
|
меним эту силу тремя состав- |
|||||
|
|
Рис. 8.19 |
|
|
|
|
|
|
|
|
ляющими X A , YA , |
Z A . Реак- |
|||||
ция |
перпендикулярна оси подшипника, т. е. находится в |
|||||||
RB |
||||||||
плоскости, параллельной плоскости xz, и поэтому раскладыва-
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ем ее на две составляющие |
X B |
и Z B . Реакция троса |
RE |
на- |
||||||||||
правлена по тросу. Схема сил показана на рис. 8.19: |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AC AD2 |
DC 2 |
5м , EC |
|
AC 2 |
AE 2 |
10м . |
|
|
||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin |
AD AC 3 5 |
0,6, cos |
CD AC 4 5 |
0,8, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
sin |
AE EC |
|
|
3 2 , cos |
1 2 . |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
При проецировании силы RE на оси х и у нужно вос-
пользоваться указанным выше в разделе 8.5.4. способом двойного проецирования силы. Составляем первые три уравнения
(8.4)
X=0, XA + XB - RE cos |
sin |
= 0, |
Y=0, YA - RE cos cos |
= 0, |
|
Z=0, ZA + ZB – P + RE sin |
= 0. |
|
|
173 |
|
При составлении остальных трех уравнений равновесия в виде сумм моментов всех сил относительно координатных осей следует применить формулу (7.23) и следствие из нее: момент силы относительно оси равен нулю, когда сила параллельна оси или ее пересекает. Для определения момента силы
|
|
RE относительно осей х и y надо разложить эту силу на две |
|
|
|
составляющие: RE параллельно оси z и |
RE - по диагонали |
плиты AC, а затем применить теорему Вариньона (§ 7.6). RE’ = |
|
|
|
RE sin . Линия действия составляющей |
RE пересекает в точке |
|
|
А оси х и у, и поэтому моменты силы RE |
относительно этих |
осей равны нулю. Составим уравнения равновесия |
|
Mx=0, ZBAB + RE’AB – PAB/2 = 0, My=0, PBC/2 - RE’BC = 0,
Mz=0; -XBAB = 0.
Из этих уравнений находим
XA = 
 3 = 1,73 кН; YA = 4/3 = 1,33 кН; ZA = 5 кН;
3 = 1,73 кН; YA = 4/3 = 1,33 кН; ZA = 5 кН;
XB = 0; ZB = 0;
RE = 10 

 3
3 3 = 5,57 кН.
3 = 5,57 кН.
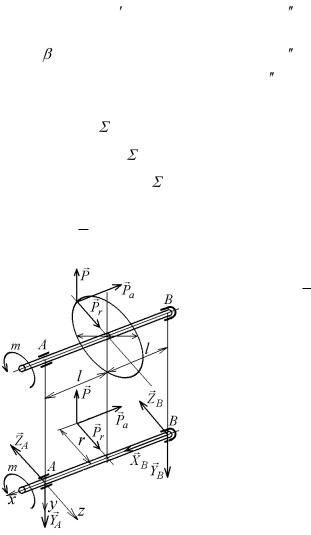
Пример 8.11. На горизонтальном валу жестко закреплено зубчатое колесо. Левый конец вала опирается на подшипник, а правый - на подпятник. На колесо действуют три силы: касательная (окружное усилие) P = 4200 H; радиальная (направлена к оси вала) РR = 1550 H; осевая (параллельно оси вала) Ра = 760 H. Колесо рас-
Рис. 8.20 174
полагается от центров опор на расстоянии l  42 мм. Диаметр колеса d = 189 мм.
42 мм. Диаметр колеса d = 189 мм.
Решение. Оси координат указаны на рис. 8.20 и выбраны так, чтобы точка приложения заданных сил на окружности колеса находилась в плоскости хz (рис. 8.20). Весом вала и колеса пренебрегаем. Надо определить в положении равновесия момент пары, вращающей вокруг оси х, а также реакции опор А и В. Решение. Рассмотрим равновесие вала с колесом. Связями являются подшипник и подпятник. Подшипник А воспринимает только радиальную силу давления в плоскости, перпендикулярной оси вала, и не препятствует смещению вала вдоль его оси. Поэтому реакцию подшипника заменяем двумя
составляющими силами: YA и Z A . Подпятник В кроме ради-
альной силы давления воспринимает и осевую силу, действующую вдоль оси вала, и поэтому реакцию подпятника заме-
|
|
|
няем тремя составляющими X B , YB |
и Z B . Составим уравне- |
|
ния равновесия (8.4):
X=0, +XB – Pa = 0, Y=0, YA – P + YB = 0 , Z=0, -ZA + Pr – ZB = 0, Mx=0, m – Pr = 0,
My=0, Pr l - 2ZB l + Par = 0,
Mz=0, P 42 - YB 84 = 0.
Подставляя числовые значения, в эти уравнения получим
YA = 2100 H; ZA = - 80 H;
XB = 760 H; YB = 2100 H;
ZB = 1636 H; m = 397000 Н*мм.
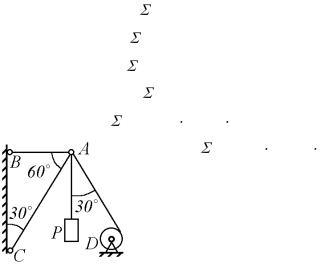
Рис. 8.21
Знак «-» указывает, что направле-
175