Материал: Механика материалов. Методы и средства экспериментальных исследований
Все компоненты испытательной системы установлены на силовой раме высокой жесткости. Силовая рама представляет собой конструкцию из стола, неподвижно установленных двух направляющих колонн и подвижной траверсы, перемещающейся по направляющим колоннам посредством односторонних гидроцилиндров для возможности изменения рабочего пространства. Непосредственно во время проведения испытаний
Рис. 2.24. Общий вид испытательной системы Instron 8850
71
траверса фиксируется на колоннах плунжерными зажимами. Гидравлический привод, состоящий из линейного, обеспечивающего осевое перемещение, и поворотного, реализующего вращательное движение, исполнительных механизмов, установлен на подвижной траверсе.
Система имеет сервогидравлический привод, рабочее давление в котором обеспечивается высокопроизводительной автономной маслостанцией. Точное управление движением поршня и прикладываемым усилием основывается на принципе действия замкнутых сервосистем посредством командных электрических сигналов. Сервоклапан, установленный на исполнительном механизме, образует часть замкнутой системы, сигнал обратной связи которой (в режиме управления осевым положением) поступает от линейного датчика перемещения, укрепленного на штоке цилиндра исполнительного механизма. Выходной электрический сигнал датчика пропорционален линейному перемещению поршня и сигналу обратной связи, который сравнивается с исходным управляющим сигналом. По выполненному сравнению производится привод исполнительного механизма в заданное положение. В режиме управления по нагрузке сигнал обратной связи поступает от датчика силы. По аналогичному принципу осуществляется управление системы поворотного исполнительного механизма. Использование сервосистем позволяет повысить точность позиционирования привода испытательных машин и приложения нагрузок к образцу.
В нижней части силовой рамы на столе установлен двухосевой датчик силы, позволяющий одновременно отслеживать осевые усилия и крутящий момент. Через образец нагрузка передается на датчик, где преобразовывается в электрический сигнал, передаваемый контроллеру для измерения и отображения. Датчик силы динамически скомпенсирован для учета инерционных нагрузок, возникающих при перемещении поршня.
Допустимая осевая нагрузка на датчик силы – 160 кН, максимальный момент – 1000 Нм, погрешность регистрируемых
72
данных: ±0,5 % отображаемой нагрузки или ±0,005 % диапазона датчика силы (по большему значению), погрешность по положению (осевому и вращательному) – ±0,005 % от полного хода.
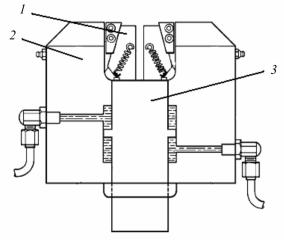
Испытательная система оборудована клиновыми гидравлическими захватами со сменными губками (рис. 2.25), позволяющими использовать образцы с плоскими и цилиндрическими головками. Толщина плоских головок образцов может составлять от 0 до 15,75 мм, диаметр цилиндрических головок – от 6 до 16 мм. Губки свободно перемещаются в корпусе захвата, поджимаются опорным штоком для фиксирования образца. Конструкция клиновидных захватов представлена на рис. 2.25.
Рис. 2.25. Конструкция клиновидных захватов испытательной системы Instron 8850:
1 – сменные губки, 2 – корпус захвата, 3 – опорный шток
Подобная конструкция захватов позволяет проводить испытания на растяжение и сжатие. При этом необходимо подбирать давление масла в контуре захватов, следуя инструкции по эксплуатации, в зависимости от максимальной нагрузки в испытании, материала образца и геометрии головок. Рекомендуется
73

устанавливать гидравлическое питание захвата на величину давления, создающую осевую силу зажима, на 10–15 % больше, чем максимальная нагрузка, которая будет приложена к образцу.
На рис. 2.26 представлены клиновые гидравлические захваты с установленным образцом и экстензометром.
Управление испытательной машиной и сопутствующими устройствами полностью осуществляется через компьютер посредством 32-битного контроллера с частотой одновременного сбора данных 40 кГц и обработки данных по всем каналам 5 кГц. Контроллер содержит две платы управления, модули регистрации и обработки данных для каждого датчика испытательной системы. Для возможности использования в системе дополнительных датчиков, например экстензометров, контроллер оборудован дополнительными модулями обработки данных.
Рис. 2.26. Клиновые гидравлические захваты с установленным образцом для испытаний
74

Описанная испытательная система позволяет проводить экспериментальные исследования на плоских, сплошных цилиндрических и трубчатых образцах, удовлетворяющих установочным размерам захватов. На рис. 2.27 приведены тонкостенные трубчатые образцы до испытаний и разрушенные образцы после испытаний при растяжении с кручением.
Рис. 2.27. Тонкостенные трубчатые образцы различной конфигурации до испытаний и разрушенные образцы после проведения экспериментов
Возможно использование образцов с различной геометрией захватных частей (плоских и цилиндрических) и размерами рабочей части в зависимости от материала, задач исследований и методик проведения испытаний. Так, для возможности установки двухосевого экстензометра используются образцы с большой длиной рабочей части или головок для обеспечения достаточного расстояния между захватами.
75